
一种气垫船自航模远程控制方法
2021-04-28 03:28唐建华韦晓富
船舶 2021年2期
唐建华 徐 尧 韦晓富
(中国船舶及海洋工程设计研究院 上海200011)
引 言
自航模属于无人船的一种,无人船是一种集智能化、网络化、集成化、机动化和无人化于一体的新型小型水面自主航行交通工具,具有机动灵活、易操控、携带使用方便、易于开展实验、成本低、效率高以及对监控环境要求低等特点,已被广泛应用于湖泊和内河水质监测、湿地环境监测、海洋环境监测、水产养殖环境监控以及水下环境测量等各种水域环境下民用和军用的诸多领域,具有广泛的应用前景。
本文的论述对象是以气垫船为母型等比缩尺设计制造的自航模。对于气垫船自航试验的研究,其意义在于气垫船运动规律的强非线性和强耦合特性,数学模型预测精度低,需自航模优化;同时,安全边界试验的不确定性和突发性,数学模型无法预测,以实船进行试验的可行性低。因此,按相似性原理来设计制作的气垫船自航模,以其进行研究的试验需对自航模型航行的运动规律及安全边界进行测试,从而获得自航模型在多种航行状态下,无约束情况下的六自由度运动状态和运动特性,验证拖曳水池模型试验的有关数据,是总体研究、分析实船运动特性的一种技术手段。
本文重点介绍的是自航模试验技术中的远程控制技术,由于自航模自由航行时控制与采集时所需通道多、数据量大,且各项参数同步测试难度大,系统时统性难以把控。所以解决好大数据量控制要素的传输与系统的同步性问题,是研究自远程控制系统的关键技术。
本文从国内外对于自航模远程控制方法研究现状入手,对研制的自航模进行介绍,同时对自控系统与远程控制系统中的关键技术进行介绍,对气垫船自航模试验技术中的远程控制技术进行探究。
1 国内外研究现状
1.1 国外研究现状
在国际上,诸如美英法等国家,对于新型且尚不熟悉的船舶会以自航模的形式进行许多仿真试验,从其缩尺比模型真实航行的数据而展开对母型船的研究。此类自航模的试验方法,由于自航模不受约束、自由航行,因而更能准确地预报船舶的运动响应。比如美国的LCAC就是通过自航模型进行大量试验,从而推导出母船的运动和控制模型。再如法国研制的“戴高乐”号航空母舰在其开发的前期阶段就已经进行了长达25 m船模在海洋中的整体运动性能分析及相关用于舰艇的高新技术海试的试验验证,这些分析及试验在船舶研制开发等方面起到了重要作用。其不受约束、自由航行的状态对远程控制提出了较高要求,相应的远离岸基的控制技术也随之发展。
1.2 国内研究现状
我国的自航模研究技术较发达国家起步较晚,技术相对薄弱,主要体现在自航模的自航模的设计水平和仿真试验环境等因素。对于仿真试验环境,国内对于自航模的研究大多基于有限室内水池,有限的运动范围对于其控制的距离并没有过高的要求。
然而,随着自航模试验技术的发展,摆脱有约束的室内或室外水池进行仿真试验是发展的趋势,其远程控制方法显得尤为重要。国内无人船与岸基的通信可满足长距离传输的方式还是以第2代移动通信技术——GPRS技术为主。虽然此种传输可远距离传输,但传输信息相对简单,无法满足复杂应用场景。本文所涉及的自航模具备在开阔水域自由航行的能力,同时其远程控制方法运用4G通信,满足传输复杂数据指令实时传输的需求。
2 自航模试验简介
本文介绍的气垫船自航模总长小于5 m,总重小于200 kg,其试验中控制流程见下页图1。它不同于常规水线面船艇,具有总重轻、航速高的特征,还包含水线面船艇所没有的围裙、空气螺旋桨、垫升风机、空气舵等特种设备。同时,所进行的试验需在无障碍物的开阔水域进行,水域面积不小于1.5 km×1.5 km,数据传输距离长和数据传输同时性也需要保障。
自航模运动进行非线性仿真试验时,选择在开阔水域以获得相对真实的试验数据,因此,开阔水域对自航模远离岸基的远程操作控制提出了较高的要求。此外,还需对研制的气垫船自航模位置、航速、姿态、气垫压力和运动等参数进行测试。对垫升风机、推进电机、舵机和风门电机等重要设备需进行远程控制(控制要素见表1)。

图1 试验流程框图

表1 自航模试验重要控制要素
远离岸基后,在保证数据长距离传输稳定性同时,大量的控制指令互换,对远程控制系统通信传输要求较高。同时,运动参数、操纵面参数和环境参数同步测试难度大。因此,大数据量控制要素的传输与系统的同步性问题需要重点解决。
3 远程控制系统介绍
为实现气垫船自航模远程控制的稳定与高效,其关键技术在于解决需大数据量控制要素的传输与系统的同步性问题。本节对远程控制系统进行介绍,控制系统分为自控系统与远程控制系统两个部分。自控系统以SIMATIC S7-1200系列为基础,以ZP3000的4G传输通道实施大数据量无线远程控制,通过调用采集系统中的GPS授时功能来实现参数采集的同步性。
对于控制系统的整体搭建,通过陆上操作系统与艇上系统的连接,实现远距离控制(其简图见下页图2)。
3.1 自航模自控系统简介
该自航模自控系统的控制方案是以SIMATIC S7-1200系列为基础设计的控制系统。
该型号的PLC具有强大的集成工艺功能和灵活、丰富的可扩展性等特点,并有多种标准化模块可供选择,便于后续的功能扩展需求。在研发过程中充分考虑了系统、控制器、人机界面和软件的无缝整合和高效协调的需求,以满足本次试验中的自动化需求。
西门子S7-1200 PLC的用户存储器125 kB 工作存储器 /4 MB 负载。存储器,可用专用 SD 卡扩展 /10KB保持性存储器。
S7-1200 PLC的技术参数如下页表2所示。
(1)模拟量输入模块SM 1231 AI 8·13位
● 输入路数:8路
● 输入类型:±10 V,±5 V,±2.5或者 0~20 mA
● 精度:11 位 + 符号位,满量程的 ±0.3%/

图2 控制系统

图3 SIMATIC S7-1200
(2)模拟量输出模块SM 1232 AQ 4×14位4×14 位
● 输出路数:4路
● 输出类型:±10 V 或者 0~20 mA
● 精度:电压:14 位;电流:13 位,满量程的±0.3%/
(3)4 G通信模块:CM 1241 RS232
通信模块 CM1241 可直接使用以下标准协议:
ASCII用于单工传输协议的第3方接口,例如带起始码和结束码的协议或带块检验符的协议。通过用户程序,可以调用和控制接口的握手信号。
● 数字电位器AS28-50-5
● 非接触式,磁感应测量技术,使用寿命长

表2 S7-1200 PLC的技术参数
● 工作量程 0~360°递增(无限位)
● 模拟电压信号 0~5 V 输出,5 V 供电
● 模拟电流信号 0~20 mA 输出,24 V 供电
● 选定量程范围内连续信号输出,分辨率 16位,独立线性高达±0.03%
● 插按式齿合或联轴器连接
● 防护等级 IP54 或 IP67
3.2 大数据量控制要素的传输
该自航模无线远程控制选用的是ZP3000 系列,远程控制网关是一种物联网无线通信网关,支持国际通用标准的FDD-LTE、TDD-LTE、WCDMA(HSPA+)、CDMA2000(EVDO)、TD-Scdma等3 G/4 G移动宽带网络制式,提供方便快速的高速网络传输功能。该系列产品采用高性能的32位专业网络通信处理器,以嵌入式实时操作系统为软件支撑平台,为用户提供安全,高速,稳定可靠的3G/4G无线路由网络,并支持2个以太网RJ45接口和通信串口。

图4 无线远程控制网关ZP3000系列
该系列产品可广泛应用于工业现场各类 PLC和触摸屏的远程控制,程序上下载及状态监控等。各类网络设备、232/485 串口设备点对点通信、视频监控和串口数据采集等。
ZP3000支持 4 G LTE 网络、WiFi、IEEE802.11 b/g/n ,向下兼容 3 G 和 2 G ,支持有线和 4 G 备份,可自动切换。可提供标准 RS-232/485 串口,支持串口 DTU(数据传输终端)功能。同时Superlink软件远程组网,可实现点对点、点对多点传输。其远程RS232/485 数据传输,支持无线透传 /Modbus协议。
ZP3000接口有WAN/LAN:1·WAN+1·LAN或配置 2·LAN 两个以太网接口(RJ45 插座),自适应MDI/MDIX。其工业串口有1个通信RS485/RS232 接口,适用于本身带有 RS485/232 接口的采集设备。接口示意图参见图5。
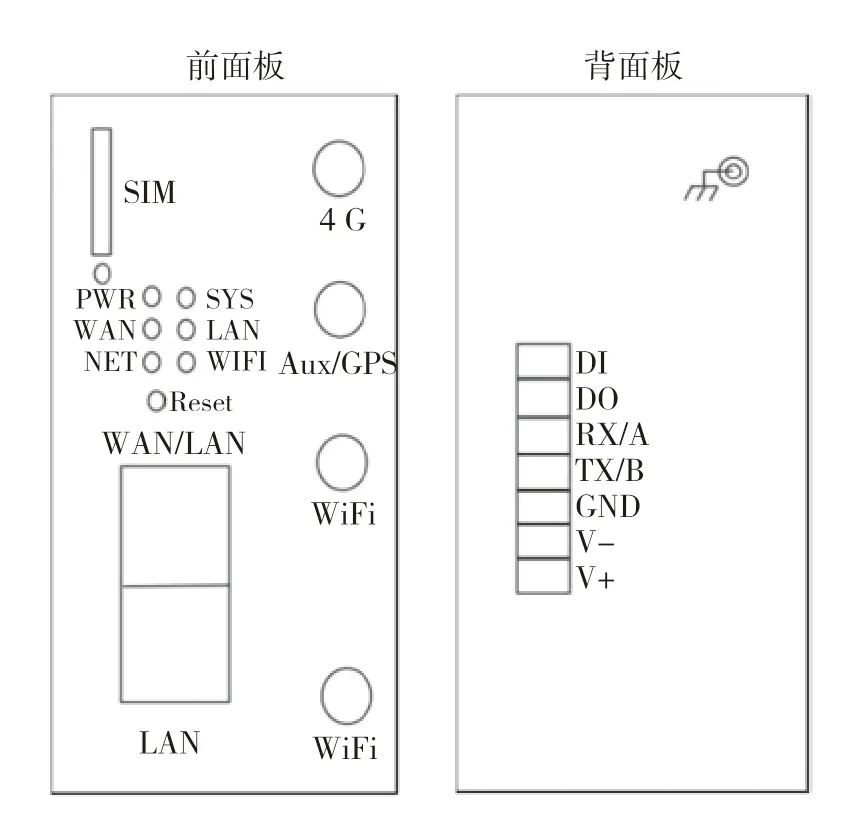
图5 ZP3000接口示意图
因此,对于表1中所涉及的关于风机控制、舵机控制、风门关闭装置控制、驱动器故障处置、失联控制和紧急处置等大量控制要素的数据传输,以及航速、姿态、气垫压力和运动等参数测试时需实时发出的采集控制指令的数据传输,均可按图6的传输方式通过ZP3000的4 G网络高速有效地进行。

图6 远程连接示意图
3.3 系统的同步性
为保证远程控制系统实施控制时对各参数实现同步控制,可采用调用采集系统中的GPS授时功能来实现。
该自航模使用的数据系统关键参数如表3所示。
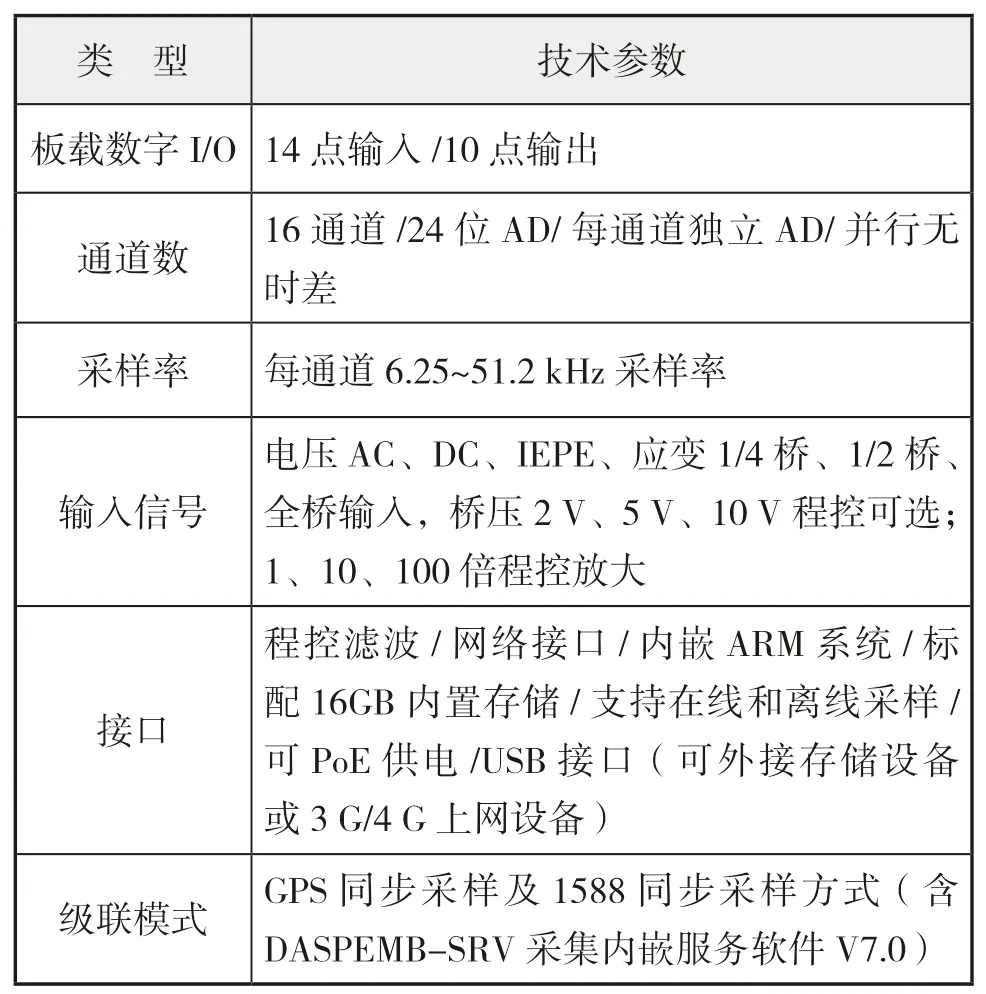
表3 自航模使用的数据系统关键参数
由于通道很多,故采用两块数据采集模块,系统连接方案见图7。

图7 系统连接方案
图中,可以采用网络或远程桌面形式实现岸上工控机或船上工控机的数据通讯和远程控制。
使用采集系统的GPS授时功能,可以实现模拟量通道和北斗信号的同步采集。只需在每次试验前对模拟量和DGPS信号进行同步控制,界面见图8。

图8 同步控制界面
4 航模试验
在某大型气垫船模型试验中,为更全面地对运动状态下的自航模型进行研究,自航模试验选择在苏州某湖泊开阔水域进行无约束自航试验。试验主要目的是测试加速、制动、回转和航向稳定等运动性能,试验内容主要包括直航和惯性试验、回转试验等。
进行自航模试验时,将所需操作各项指令集成于驾控台,从岸基驾控台进行远程控制,驾控台的操作界面见图9。

图9 操作界面
自航模惯性试验中,自航模加速到要求航速稳定一定时间后,通过岸基驾控台远程控制来降低推进风机转速。控制指令发出时,参数采集仪器能明显记录其速度变化(见下页图10)。
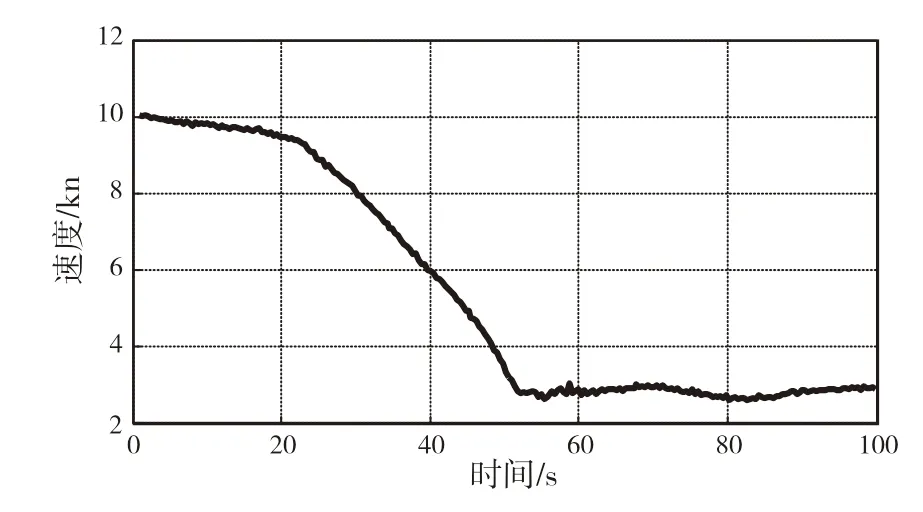
图10 惯性试验远程控制速度
自航模回转试验中,自航模直航加速到要求航速后,通过岸基远程控制操纵空气舵角度。从岸基驾控台控制指令发出,同一时间舵角角度调整和舵角变化情况见图11。
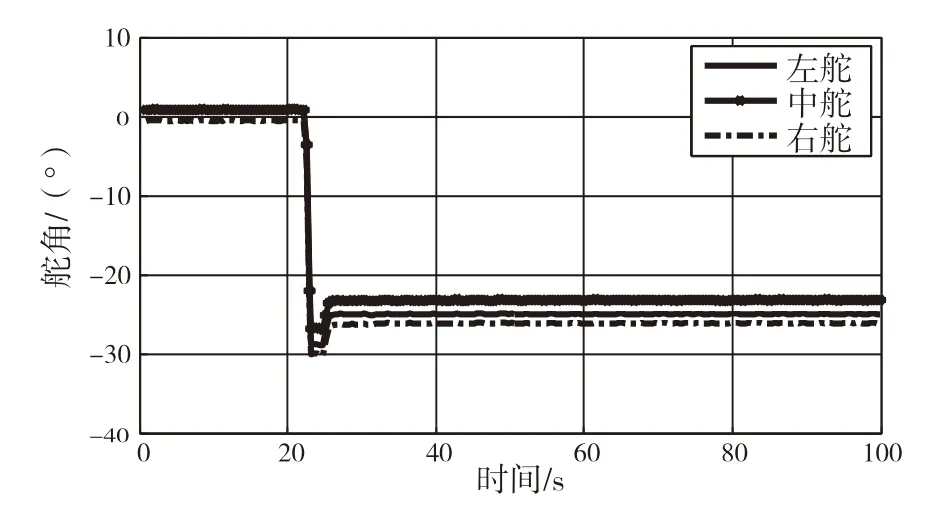
图11 回转试验远程控制舵角
在自航模各系试验中,通过操作岸基控制界面向自航模船载控制系统发出控制命令,船载控制系统依据不同的控制命令进行相应的运动,可实现岸基系统对船载系统的远程控制功能。同时,岸基系统能够实时获得船载系统的各项参数信息,可完成船载系统与岸基系统的远程通信功能。通过各系统协调配合,可完成诸如图12回转航行等复杂运动,以满足研究母型船试验所需的航行要求。

图12 自航模回转航行轨迹图
通过船载的数据采集仪器记录并分析相关运动参数变化情况,进一步验证运动特性和安全边界。经验证试验数据真实有效,为实船操纵和安全限界设计提供了有效的试验支撑。
5 结 语
本文基于气垫船自航模设计一套远程控制系统,主要选用西门子SIMATIC S7-1200与ZP3000无线远程控制,其中大量控制要素均通过4 G通信进行数据互换传输。
经试验论证,本文所论述的远程控制系统对于长距离传输稳定性较强,在某大型气垫船模型试验中发挥了重要作用。通过这套系统进行气垫船自航模型试验技术研究,能补充完善气垫船总体技术设计的试验验证手段。同时,此套控制系统适用性较强,对于控制要素较多的无人船远程控制设计也具有一定的参考价值。
