
基于二维超声相控阵的流量测量技术研究
2021-04-27 06:52罗浩
水利科技与经济 2021年3期
罗 浩
(新疆维吾尔自治区水利科技推广总站,乌鲁木齐 830000)
1 概 述
基于瞬时超声技术的流量测量,在水利、石化和医学行业中越来越流行[1-2]。在这种方法中,两个超声换能器相对放置在上下游,通过测量超声束上下游传播的时间差可以得到平均流速。然而,超声信号的信噪比经常受到声波漂移的影响,延长了接收时间,增加了测量范围,降低了检测概率,而且传感器的安装误差会进一步降低流量测量的精度。本文介绍了一种基于相控阵技术的超声波流量测量方法。使用相控阵的一个优点是,高流速引起的超声波束传播方向的变化可以通过波束控制进行电子和动态补偿,从而实现最佳信噪比、更宽的测量范围以及使用多个超声波路径进行测量[3-4]。
弯曲超声换能器利用板弯曲模式工作,能够在空气和水等低声阻抗流体中产生和接收超声波,具有较高的转换效率、鲁棒性和相对较低的成本。将弯曲超声换能器与相控阵技术相结合,可以实现这些优点,本研究验证了二维弯曲超声相控阵技术在流量测量中的适用性。
2 研究方法
相控阵流量仪器测量系统由二维超声相控阵和单个超声换能器组成。建议在相控阵系统的最终版本中,只使用相控阵传感器,可增加最终系统的灵活性。流量测量配置的横截面见图1,其中传感器1为单个超声波换能器,阵列元件A、B、C和D分别代表四元线性阵列。单个传感器以相对于阵列法线方向的θ角面向阵列中心。
波束控制技术应用于声波的发射和接收。当超声波束向上游传播时,单个超声换能器作为发射器工作,二维阵列中的元件同时接收超声波。对接收到的超声波信号施加延时,并将时移信号求和,以产生最大振幅信号。当超声束顺流而下时,阵列中的单元线以固定的延迟连续激励,产生超声的实质性干涉,由此单超声换能器接收叠加的超声信号。发射和接收过程中使用的时间延迟决定了超声波束相对于阵列法线的入射角。在实际应用中,流速可以在相对较短的时间内变化,从低速的层流到高速的湍流。

图1 基于超声相控阵技术的流量测量配置的横截面超声波束
为了补偿声束漂移效应,必须根据流速的变化动态调整波束形成过程中的最佳角度和时间延迟,以获得最大的信噪比和最大的测量范围。根据经典的瞬时测量方法,超声上下游的传播时间满足方程(1):
(1)

求解方程(1),得到管道横截面上超声波路径投影线上的平均流速,见式(2)。
(2)
管道横截面上的平均流速可通过方程式(3)计算:
(3)

在相控阵的设计、制造和特性描述方面已有相关研究[5-6]。本文提出的二维弯曲超声相控阵的结构见图2。为了确保阵列元件性能的高度一致性,使用36 mm×36 mm×0.25 mm的弹性钛板制作,共16个阵列单元的振动振膜。钛板上连接有16个孔的钢挡板,直径为6.6 mm、间距为7.4 mm的孔隙将钛挡板分成16个单独的阵列元件。16个直径为6 mm、厚度为0.25 mm的压电陶瓷片连接到弯曲元件上,导线通过36 mm×36 mm×8 mm挡板上的孔焊接到阵列的引线。为了减少驻波振动对相邻元件的影响,使用后罩板进行阻断,并用环氧胶粘剂与挡板粘结。后罩板同时还增强了阵列的机械性。图2(c)为带有外壳的装配阵列。

图2 二维超声相控阵示意图
阵列的每个弯曲单元都可以看作是一个在其基本共振模式下振动的边缘固定弹性膜片,在低声阻抗介质中有效地产生和接收超声波,而不需要阻抗匹配层,与其他类型的空气耦合超声换能器不同。通过对折流板、陶瓷片和后罩板的仔细考虑,可以有效地产生各弯曲单元的轴对称(0,0)模。用阻抗分析仪、校准传声器和激光多普勒测振仪对单个阵列单元和整个阵列的中心频率、带宽、辐射方向图和机械串扰进行了表征,表明阵列单元的中心频率均约为49±1.5 kHz,阵列的最大转向角在60°左右。
3 实验验证
图3(a)为由尼龙制成的仪表主体用于容纳弯曲超声相控阵和单超声波换能器。仪表内径为146 mm,每端有一个法兰。3个60 mm×60 mm的端口被加工到仪表主体中,适配器的设计确保单个传感器以30°的角度面对阵列(I),见图3(b)。第二个阵列,见图3(a),被称为阵列(II),也包括在仪表主体中,用于通过反射超声波路径进行测量。32通道相控阵控制器用于控制阵列以及数据采集。通道1连接单个传感器,通道2至16连接阵列(II),通道17至32连接阵列(I),并且每个通道都能工作在发射模式和接收模式中。

图3 实验装置及流量计横截面图
设备包括一台压缩机作为主要流量源,以及一个校准的机械流量计作为基准流量计。实验是在恒定的室温下,以流体为流动介质的开流回路中进行的。数据采集采用全矩阵捕获技术,每个通道按发射模式顺序工作,所有剩余通道作为接收器,以实现所有可能的超声波路径的数据采集。从0~40 m3/h的流量范围内采集超声波信号,增量为10 m3/h。为了确定每个通道的最佳延时,使用互相关法计算通过全矩阵捕获方法获得的接收时间。图4(a)显示了上游和下游超声波束的接收时间的变化,表明上游超声波束的接收时间随流速增加而增加,而下游超声束的接收时间减小。在上游时,相邻阵列柱之间的时间延迟随着流速的增加而增加,而在下游时则减小。接收时间的差异是最佳光束转向角的结果。
使用式(2)和式(3)计算的超声波相控阵流量计的平均流速与参考流速进行比较,结果见图4(b)。
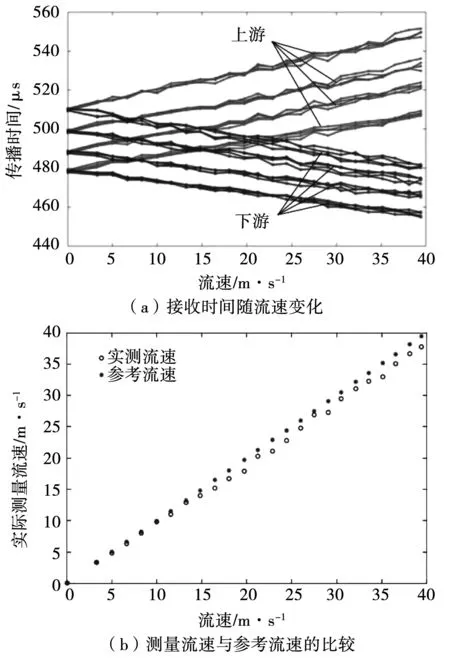
图4 实验结果
一般来说,使用相控阵测量的流速与低流速水平的校准参考值密切相关,但对于超过15 m/s的流速,显示出更大的差异。有一系列因素可以解释这些差异。例如,与机械流量计相比,超声波技术对流速剖面的干扰较小,因此两个流量计测得的平均流速也不同。此外,流量计和流量回路弯管之间的距离小于管道内径的15倍,这会产生不同的速度剖面,从而产生不同的平均流速。提高精度的平均流速测量需要更严格的校准过程、复杂的流量回路、压力和温度的精确测量,以及对系统组件和流经流量计的气体密度进行适当评估。但如果机械流量计获得的参考速度被认为是准确的,则可以根据图4(b)对超声波相控阵流量计的测量结果应用校正系数。
4 结 论
本文提出一种基于二维超声相控阵的流量测量方法,实现了声漂移效应对超声束的影响补偿。通过对超声相控阵的设计、制造和表征过程,并在0~40 m3/h的流量范围内进行了流量试验。实验证明,测量速度与参考速度之间存在密切的相关性,说明了超声相控阵用于精确流量测量的可行性。今后将研究具有这种类型阵列的多超声波束路径的流动特性,以进一步提高流量测量精度。
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
电子制作(2019年24期)2019-02-23
电子制作(2018年2期)2018-04-18
舰船电子工程(2017年11期)2017-12-25
水下无人系统学报(2017年5期)2017-11-22
中国核电(2017年2期)2017-08-11
现代防御技术(2016年1期)2016-06-01
雷达与对抗(2015年3期)2015-12-09
