
基于三维激光扫描的高层建筑建模研究
2021-04-27 00:49:27宋洪英曹坤闫晓楠
粘接 2021年8期
宋洪英 曹坤 闫晓楠

摘 要:三维激光扫描技术能够快速获取目标表面大量的点云数据,通过对这些点云数据利用和处理,能够反映出目标的属性和三维模型。高层建筑发展速度不断增加,其复杂性、庞大性增加了建模难度。于是文章借助三维激光扫描技术,对高层建筑建模进行研究。首先对三维激光扫描系统的基本原理进行分析,然后基于三维激光扫描建立某高层建筑模型,结果表明构建的高层建筑模型效果较好、构建速度较快。
关键词:三维激光扫描;高层建筑;建模
中图分类号:P225.2;TU198 文献标识码:A 文章编号:1001-5922(2021)08-0123-04
Research on High-rise Building Modeling Based on 3D Laser Scanning
Song Hongying, Cao Kun, Yan Xiaonan
(Aerospace Architecture Design & Research Institute Co., Ltd., Beijing 100162,China)
Abstract:Three-dimensional laser scanning technology can quickly obtain a large number of point cloud data on the target surface. By using and processing these point cloud data, it can reflect the attributes and three-dimensional model of the target. The development speed of high-rise buildings continues to increase, and their complexity and largeness increase the difficulty of modeling. So the paper uses 3D laser scanning technology to study the modeling of high-rise buildings. First, the basic principles of the 3D laser scanning system are analyzed, and then a high-rise building model is established based on the 3D laser scanning. The results show that the constructed high-rise building model has a better effect and a faster construction speed.
Key words:3D laser scanning; high-rise buildings; modeling
三维激光扫描技术能够连续、快速、准确、自动的获取目标物体表面点云数据,通过大量的点云数据能够重建物体模型,将多种传统的测绘技术融为一体,能够在很多领域中发挥重要优势,属于一种全新的数据获取方法[1-2]。随着我国现代社会进程加快,高层建筑越来越多,由于高层建筑的特点不同,增加了其建模难度,需要使用大量的准确数据才可能构建一个完整模型。三维激光扫描技术的发展,能够简化高层建筑建模,提高高层建筑建模的准确度,能够准确反映高层建筑的特征,并且能够将其转化为三维模型[3]。于是文章选择某高层建筑作为研究对象,借助三维激光扫描技术进行高层建筑建模。
1 三维激光扫描系统的基本原理
三维激光扫描技术的应用范围广,具有较强的应用效果和作用。其中三维激光扫描系统的具有4个主要不同的部分,分别为扫描软件控制平台、激光扫描仪、电源供应系统和数据处理平台,因其这4个部分的组成,使得三维激光扫描技术能够发挥应有的作用效果[4-5]。在4个部分中激光扫描仪作为核心部分,其主要由激光扫描系统和激光测距系统构成。下面将从激光测距系统和激光扫描系统这两种组成部分进行分析,即三维激光扫描系统的基本工作原理。
1.1 激光測距系统
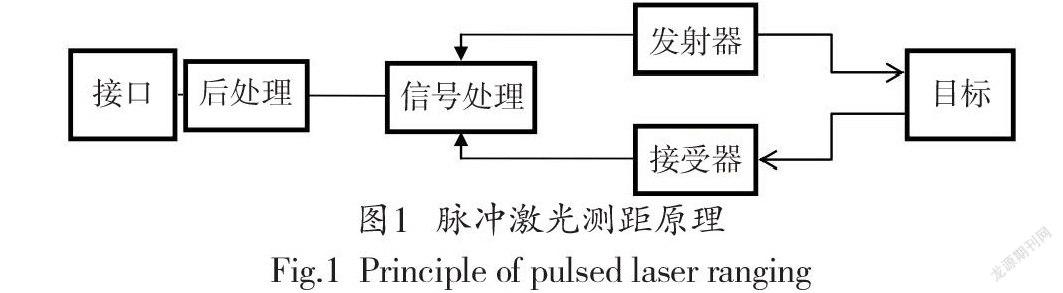
激光测距系统可以使用不同的测距方式,比较常见的方式有脉冲式测距、相位式测距和激光三角测距,每种测距方式都有各自的特点。在三维激光扫描仪中主要使用脉冲测距方式,这种测距方式的主要原理如图1所示。使用激光发射器对被测目标发射激光脉冲信号,然后该脉冲信号会被反射回来,然后被接收器所接收,记录器会将发射信号到接收信号的时间记录下来,即脉冲信号的往返时间t ,由于光速c已知,于是可以根据下面公式计算出测量距离S[6]。
1.2 激光扫描系统
在三维激光扫描仪中会存在一个坐标系统,其中坐标原点为仪器中心位置,横向扫描时的方向设置为X轴,然后垂直于X轴的横向扫描面设置为Y轴,最后垂直于横向扫描面的方向设置为Z轴,图2即为激光扫描系统坐标计算示意图。通过三维坐标,能够确定被测点的位置。假设目标点P点的坐标为(Xp、Yp、Zp),如图2所示,于是该点的计算公式如下:
2 高层建筑建模
2.1 点云数据采集
点云数据采集作为高层建筑建模的关键所在,其主要采集流程如图3所示。在扫描之前,需要进行实地考察,主要目的在于合理布设扫描站点,因为一个合理的扫描测站布设方案能够提高点云数据采集的质量和效率。为了得到更好的布设方案,需要考虑的因素比较多:比如首先需要考虑到三维激光扫描仪最佳的工作范围,为了能够保证测量点能够在最佳工作范围内,通常会将两个相邻扫描测站之间的距离设置得更小一点,即需要小于扫描仪的最佳工作范围;然后扫描点在布设过程中需要考虑与控制点的配合问题;扫描时尽量保证正直扫描;最后还需要考虑到数据的重叠度问题和扫描过程中的障碍物问题等[7]。
扫描过程并不是直接对目标物进行扫描即可,在这个扫描过程中需要将其划分为4个不同阶段,分别为粗略扫描、精细扫描、精扫靶标和照片获取,粗略扫描主要是进行全方位扫描,其中使用较低的分辨率,扫描时间非常快,能够得到全景扫描的二维图形;精细扫描就是在二维图的基础之上选择目标区域进行长时间的扫描,其中需要使用高分辨率扫描;精扫靶标就是对后视靶标进行高分辨率扫描,确定其中心位置,从而保证点云数据的拼接准确度;照片获取就是在激光扫描仪器上安装数码相机,从而获得对应扫描点云数据的真实纹理信息。
以某高层建筑作为研究对象,该建筑的位于繁华地带,于是就会增加数据采集的难度。在进行点云数据采集之前,对高层建筑的周围进行实际考察,然后再根据扫描测站布设的注意事项和相关规范,采用远近结合的设置方式,一共设置了12站,如图4所示,其中在高层建筑四周较近的地方设置站点,用来获取高层建筑底部完整的点云,然后在高层建筑比较远的地方设置站点,用来获取高层建筑整体点云。
2.2 点云数据后期处理
高层建筑的点云数据采集完成之后,就需要对这些数据进行处理,点云数据的后期处理流程如图5所示。于是接下来将对这4个步骤进行分析。
2.2.1 点云数据拼接
三维激光扫描仪在使用过程中,由于多种因素的影响使得每个扫描站点只能对高层建筑的某一部分点云进行获取,为了得到完整的点云数据,需要将所有扫描站点获取的点云数据拼接在同一坐标系中。对点云数据进行配准的方式不止一种,其中使用频率最高的方法为基于轮廓特征的点配准方法,这种方式从本质上讲就是基于最小二乘法的最优配准方式[8]。配准又可以分为两种形式,分别为基于目标配准和无目标配准。由于文章只需要对高层建筑的外部形状特征进行采集,使用靶球进行测量,于是文章选择基于目标配准的方式进行配准。
2.2.2 点云数据去噪
使用三维激光扫描技术获取的点云数据会受到多方面因素的影响,从而导致有些数据会偏离理论值,这些噪声点会影响到后期数据处理的精度,所有有必要对其进行去除。常用的去噪方式比较多,比如观察法、有序点云去噪法、散乱点云去噪法等,在有序点云去噪法中又可以分为好几种方法,其中有一种方法为滤波法,这种方法的优势较多,比较适合应用于文章研究的高层建筑建模中[9]。因为噪声数据具有高频率特征,通过设计滤波函数,能够将噪声变得更加平滑,这种去噪方式就是滤波法。其中使用的滤波算法通常情况下有3种,分别为高斯滤波、平均滤波和中值滤波等,这3种滤波算法的滤波效果如图6所示,其中中值滤波属于非常常见的一种非线性滤波方式,具有比较好的滤波效果[10]。然后根据实际情况,文章选择中值滤波方式进行去噪处理。最终的去噪结果如图7所示。
2.2.3 点云数据精简
在使用三维激光扫描技术时,会对高层建筑表面进行大量的点云数据采集,这些点云数据会过于密集,从而影响到模型的光顺性,而且还会影响到计算机的运行速率。所以为了解决这些问题,可以对密集的点云数据进行精简,提取出能够反映曲面特征的点,然后将其余的数据删除,于是就可以降低点云数据的密集,提高计算机的运行时间,并且还能够较好的反映高层建筑模型。通过国内外学者对点云数据精简的不断研究,当前使用比较广泛的精简算法为基于曲率和基于法向量的方式。文章选择基于曲率的精简方式对点云数据进行处理,能够删除大量冗余数据。
2.2.4 点云数据分割
点云数据分割主要应用于点云数据非常多的情况下,为了方便数据处理,可以将需要处理的数据分割出来单独进行分析。当前自动分割方法有3种,分别为基于边的点云分割法、基于面的点云分割法、基于混合区域的点云分割法[11]。点云数据自动分割的软件也比较多,但是大多情况下需要根据操作者的经验完成手动分割。文章研究的高层建筑建模,其中涉及到的点云数据量非常庞大,使用相关软件进行手动分割点云会使得计算机运行速度较慢,严重时还会造成软件崩溃,所以文章可以对单站进行分割处理,或者还可以对精简之后的数据进行分割处理。
2.3 高层建筑的模型建立
点云数据处理完成之后,即可根据数据对高层建筑进行建模分析。首先,需要从点云数据中提取高层建筑的特征线,通过特征线能够描述出高层建筑的外貌。特征线提取使用的算法比较多,当前比较常用方式有机遇曲率值、基于法向量等方式,还可以使用影响特征线辅助点云提取特征线[12]。为了更加方便特征线的提取,研究者们发明了相关的软件可以实现特征线的提取。文章选择Trimble Realworks软件进行特征线提取,该软件中含有一个快速轮廓曲线命令,通过选择一个合适的视角和高度,该软件能够能够得到不同角度的剖切面,而且还会进行曲线拟合。在使用该软件进行特征线提取时,可能会存在缺失的部分,如果出现此情况,可以将其和现场照片进行对比,将缺失的特征线补齐即可。
特征线提取完成之后,将其导入到Sketchup中,根据其中平移、推拉等工具能够建立高层建筑的三维模型基本框架。在高层建筑建模中还存在花坛、广告牌等单体要素,于是接下来将这些单体要素的点云数据分割出来对其进行单独建模即可。然后将建立好的单独模型导入到基本框架中,去要对其进行组合,并且统一坐标,于是就可以形成高层建筑的三维白模。
此时得到的白膜并不能完全真实的反应出高层建筑,还需要进行纹理映射。首先使用照相机获取实际建筑的纹理图,此时会由于各种因素导致纹理扭曲,不能将其直接贴到白膜上。于是将该纹理图纠正为正视图,此时即可将该图导入到Sketchup中,并使用相关编辑器将纠正后的纹理图贴到白膜上,通过相关调整之后,使得纹理图能够符合高层建筑的原本形貌,最后使用Enscape插件对模型进行渲染,于是高层建筑的三维模型如图8所示。
3 结语
通过三维激光扫描技术获取高层建筑的点云数据,然后对点云数据进行处理和加工,最后借助相關软件能够建立高层建筑的模型。经过上文分析,三维激光扫描技术的功能强大,使用效果好,能够在诸多领域中发挥重要作用。文章用其进行高层建筑建模,最后得到的模型效果较好。文章选择的高层建筑相对比较规整,所以基于三维激光扫描的建筑模型效果较好,如果对于异形高层建筑建模,要想快速有效的建模还需要不断对其进行深入研究。
参考文献
[1]杨必胜, 梁福逊, 黄荣刚.三维激光扫描点云数据处理研究进展,挑战与趋势[J].测绘学报,2017,46(10):1509-1516.
[2]梁爽,谭龙,李海泉,等.三维激光扫描技术制作不可移动文物本体测绘图方法研究[J].测绘与空间地理信息,2016,39(2):123-125.
[3]贾东峰,程效军.三维激光扫描技术在建筑物建模上的应用[J].河南科学,2009(09):1111-1114.
[4]郭祥,刘卉.三维激光扫描技术及其在地质中的应用展望[J].软件导刊,2009,000(003):183-185.
[5]徐进军,余明辉,郑炎兵.地面三维激光扫描仪应用综述[J].工程勘察,2008(12):35-38.
[6]张永彬,高祥伟,谢宏全,等.地面三维激光扫描仪距离测量精度试验研究[J].测绘通报,2014(12):16-19.
[7]袁夏.三维激光扫描点云数据处理及应用技术[D].南京:南京理工大学.
[8]Besl P J .A method for registration of 3d shapes[J].IEEE Trans on PAMI,1992,14(2):239-256.
[9]温银放.数据点云预处理及特征角点检测算法研究[D].哈尔滨:哈尔滨工程大学,2007.
[10]余鹏磊, 于海洋, 谢秋平,等.基于RANSAC算法的地铁隧道点云数据滤波[J].测绘工程,2014,23(008):28-31.
[11]宋景.基于反求工程的贵州少数物质民族文化遗产的保护和开发技术研究[D].贵阳:贵州大学,2007.
[12]王波.影像特征线辅助下的三维激光点云建筑物建模[D].南京:南京师范大学,2013.
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
中国科技纵横(2017年3期)2017-03-29 16:01:41
中国科技博览(2016年19期)2016-10-19 13:54:42
中国科技博览(2016年18期)2016-10-19 09:03:36
中国科技博览(2016年18期)2016-10-19 08:49:55
科技视界(2016年20期)2016-09-29 13:07:14
科技视界(2016年4期)2016-02-22 12:45:32
绿色科技(2015年6期)2015-08-05 18:25:42
