基于GF-1影像的巢湖浊度遥感监测及时空变化研究
2021-04-24 09:35:28晁明灿赵强杨铁利李华富谢发之吴蕾
大气与环境光学学报 2021年2期
晁明灿,赵强,杨铁利∗,李华富,谢发之,吴蕾
(1辽宁科技大学土木工程学院,辽宁 鞍山 117004;2安徽建筑大学环境与能源工程学院,安徽 合肥 230601;3安徽省环境科学研究院,安徽 合肥 230022)
0 引 言
浊度反映了光在水体传输中的受阻程度,水体中的悬浮物或可溶物对入射光的散射和吸收作用会造成入射光的衰减,影响水体的热量吸收及外观表现,同时对研究湖泊的污染物迁移具有重要意义。浊度作为评价湖泊水质的重要参数之一,对水质污染有一定的指示作用[1]。
浊度反演模型的构建方法有三种:经验法、半经验/半分析法和分析法,其中常用的是半经验/半分析法,在已知水质参数光谱特征下,通过利用最佳波段组合与地面实测值的统计关系建立反演模型。浊度的遥感监测已经日趋成熟,曹引等[2]利用微山湖实测的总悬浮物浓度、浊度和GF-1、HJ-1数据构建反演模型,对微山湖水质进行遥感监测;宋挺等[3]基于Landdat8 OLI数据对太湖的蓝藻密度和浊度进行定量反演研究,在反演的精度上不断提高;Hicks等[4]利用Landsat ETM+数据和实测的总悬浮物浓度、浊度和透明度数据得到反演模型,对新西兰怀卡托区域部分湖泊水质进行遥感监测,并将模型应用到无观测的湖泊;陈黄蓉等[5]利用GOCI数据对长江口及邻海域的浊度日变化进行遥感监测。
内陆水环境影响因素复杂,动态变化过程明显,难以捕捉到内陆湖泊水体的高时空动态特征。针对这一问题,以巢湖为研究区域,浮标检测站监测和遥感监测并行的方式,分析了巢湖的水体浊度的时空变化规律,旨在为内陆湖泊空地一体化浊度监测提供新思路。
1 测区概况和数据获取
巢湖是我国五大淡水湖之一,位于安徽中部,流域面积约800 km2。研究中使用的实测数据来自于巢湖湖面的8个浮标自动检测站的浊度数据,其中浮标自动检测站采集数据的频率为1 h一次,采用的浊度单位为NTU。浮标自动检测站的分布位置如图1所示,按照1~8序号排序,分别对应西半湖湖心、湖滨、新河入湖区、中庙、兆河入湖区、东半湖湖心、黄麓、巢湖船厂。

图1 检测站分布图Fig.1 Distribution of monitoring stations
通过对影像质量、过境时间、云量等条件综合考虑,选择GF-1 WFV数据对巢湖浊度进行遥感定量反演,共筛选出7景2019年的巢湖区域影像,数据来源于中国资源卫星应用中心(http://www.cresda.com),基于GF-1卫星的2019年巢湖过境影像时间分别为1月17日、3月11日、5月3日、5月23日、10月30日,12月11日,12月31日。
2 研究思路
利用ENVI5.3对巢湖过境影像进行辐射定标、大气校正和几何校正等处理,其中,几何精校正以Landsat8影像作为基准影像,大气校正采用ENVI5.3中的FLAASH模块进行处理,FLAASH采用MODTRAN4辐射传输模型,可以有效降低大气影响,获取地表真实反射率[6]。通过归一化水体指数(Normalized difference water index,NDWI)[7]对巢湖水域范围进行提取,利用浮标检测站的浊度数据与卫星数据构建反演模型,对巢湖浊度进行遥感定量反演。图2是研究的总体思路。

图2 研究思路流程图Fig.2 Flow chart of research idea
3 基于浮标数据的巢湖浊度时空变化分析
利用浮标自动检测站获取长时序的高频现场浊度数据,基于该高频浊度数据,分析巢湖水体浊度的高动态变化特性,为更有效的巢湖浊度监测提供支撑。图3(a)–(g)是对不同日期单日内8个浮标检测站浊度最大值、最小值、标准差的统计结果,巢湖整体浊度的变化范围大约在2.3~139 NTU。由(a)图得到,1月17日东半湖的平均浊度高于西半湖,其中兆河入湖区和巢湖船厂的浊度日间变化较大,兆河入湖区浊度最高;(b)图可以看出,3月11日巢湖船厂的浊度明显高于其他检测站的监测区域;由(c)图得到,5月3日兆河入湖区的浊度日间变化较大;由(d)图得到,5月23日西半湖湖心、湖滨的浊度日间变化较大,同时浊度高于其他检测站区域;由(e)图得到,10月30日兆河入湖区和东半湖湖心的浊度低于其他地方;由(f)图可知,12月11日兆河入湖区、东半湖湖心、黄麓的浊度较低;由(g)图得到,12月31日的新河入湖区、兆河入湖区、东半湖湖心的浊度明显较高。巢湖浊度的高动态变化主要受风速、泥沙活动等因素的影响,浊度变化会受到风速变化的驱动,风速的变化会影响水中颗粒物的再悬浮过程,进一步引起浊度变化;受入湖河流携带泥沙、有机悬浮物的影响,湖泊各个区域的泥沙等悬浮物含量不同,而泥沙等悬浮物含量高的区域浊度也会较大。综上所述,不同站点受不同因素影响,浊度变化程度显著,部分站点的浊度日间变化较大,表明了巢湖水体整体的高动态特性。

图3 巢湖浊度统计。(a)2019-01-17;(b)2019-03-11;(c)2019-05-03;(d)2019-05-23;(e)2019-10-30;(f)2019-12-11;(g)2019-12-31Fig.3 Turbidity statistics of Chaohu Lake.(a)January 17,2019,(b)March 11,2019,(c)May 3,2019,(d)May 23,2019,(e)October 30,2019,(f)December 11,2019,(g)December 31,2019
根据统计学方法分析,标准差与平均值之比的百分数为样本的变异系数(Coefficient of variation,CV)[7],利用该系数可以消除测量尺度和量纲的影响,并反映样本的离散程度,表1是根据CV值对变异程度的分类[8]。

表1 变异程度分类Table 1 The degree of variation classification
基于卫星同步时间的地面数据,利用变异系数对8个浮标检测站的浊度数据按照日间变化程度进行分类,如图4所示。从图中可知5月23日、10月30日浊度变异程度为中等变异的检测站个数均为6个,其余时间的浊度变异程度为中等变异的检测站个数小于或等于2个,5月、10月是巢湖蓝藻水华爆发的初期和末期[9],水质情况复杂,浊度受到多种因素影响,湖泊不同区域或同一区域的不同时段浊度变化显著。

图4 基于浊度变异程度的检测站分类Fig.4 Monitoring stations classification based on degree of turbidity variation
4 巢湖浊度的遥感监测
4.1 巢湖浊度定量反演模型的确定
波段比值模型是常用的半经验/半分析模型,也是遥感反演中的常用模型,不仅构造简单,同时可以消除因太阳高度角、观测角不同而造成的误差,还可以抵消大气效应[10],其用统计方法对已知的水质光谱曲线特征进行分析,选择最佳的波段组合作为自变量,以水质参数为因变量,估算水质。
利用SPSS软件对浮标自动检测站的浊度数据与各波段反射率比值进行Pearson相关性分析,得到相关性最大的波段组合及Pearson相关系数如表2所示,其中B1–B4分别对应GF-1 WFV传感器的第一至第四波段,B2/B1、B3/B2、B3/B1、B4/B3、B4/B2、B4/B1为波段组合情况。
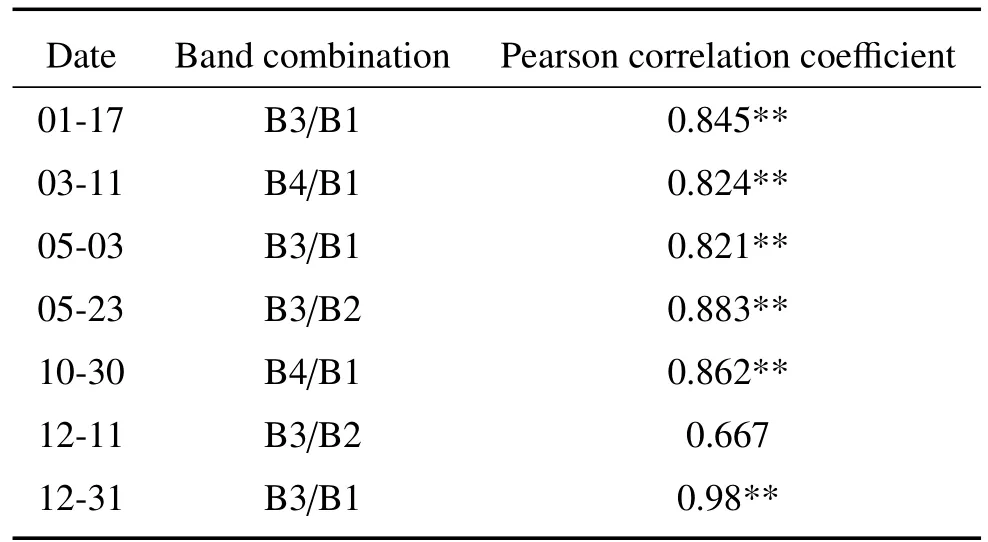
表2 浊度与波段反射率比值相关性分析Table 2 Correlation analysis between turbidity and band reflectance ratio
选取6个浮标数据用于建模,2个浮标数据验证反演模型的精度,验证点选为黄麓和湖滨检测站。基于相关性分析结果,利用相关性最高的波段组合与地面同步的浮标数据建立线性回归拟合方程,即反演模型。表3是巢湖浊度遥感反演模型及精度评价,其中,浊度数据与波段比值的散点拟合度R2用来评价建模的精度。平均绝对误差(MAE)、均方根误差(RMSE)用来评价反演模型的精度。结合图4来看,5月23日、10月30日的均方根误差较大,主要受日间浊度变异程度的影响。通过对反演模型的精度评价,可以看到反演模型具有一定的精度,可用于巢湖浊度定量反演。

表3 巢湖浊度反演模型及精度评价Table 3 Turbidity retrieval model and accuracy analysis of Chaohu Lake
同时,从表3中发现,不同时间浊度反演的最优波段组合不同,这是由于不同时间水体组成成分存在较大差异造成的。最优波段组合中主要含有B3(红色)波段、B4(近红外)波段,说明红色波段和近红外是浊度的敏感波段。图5是浮标数据与对应的单波段反射率的相关性统计,从图中可以看到1月17日、3月11日、5月3日、10月30日、12月31日近红外波段与浊度相关性最高;5月23日、12月11日红色波段与浊度相关性最高。因此红色波段、近红外波段是反演浊度的重要波段,这与其他学者的研究结果基本一致[3,11]。
4.2 巢湖浊度遥感反演
利用得到的反演模型分别对巢湖浊度进行遥感定量反演,图6(a)–(g)是巢湖浊度的反演结果。由(a)图可知1月17日西半湖的整体浊度低于东半湖,兆河入湖区的浊度明显高于其他地方,这与浮标检测站实测的浊度数据一致;(b)图可以得到3月11日巢湖整体浊度偏低;由(c)、(d)和(e)图得到,5月、10月的巢湖水体整体浊度明显增长,这可能与蓝藻水华的爆发有关,聚集的颗粒态藻类增加了水体的浊度,5月3日的中庙、巢湖船厂浊度较高,5月23日和10月30日的高浊度水体分布基本一致,主要集中在巢湖西半湖、巢湖南边沿岸以及东半湖的北边沿岸;由图(f)得到12月11日的巢湖整体浊度比蓝藻爆发时段明显降低;由图(g)得到,12月30日巢湖整体浊度较高,新河入湖区、兆河入湖区附近区域的浊度比其他地方偏高,这与浮标监测站的实测结果趋于一致。
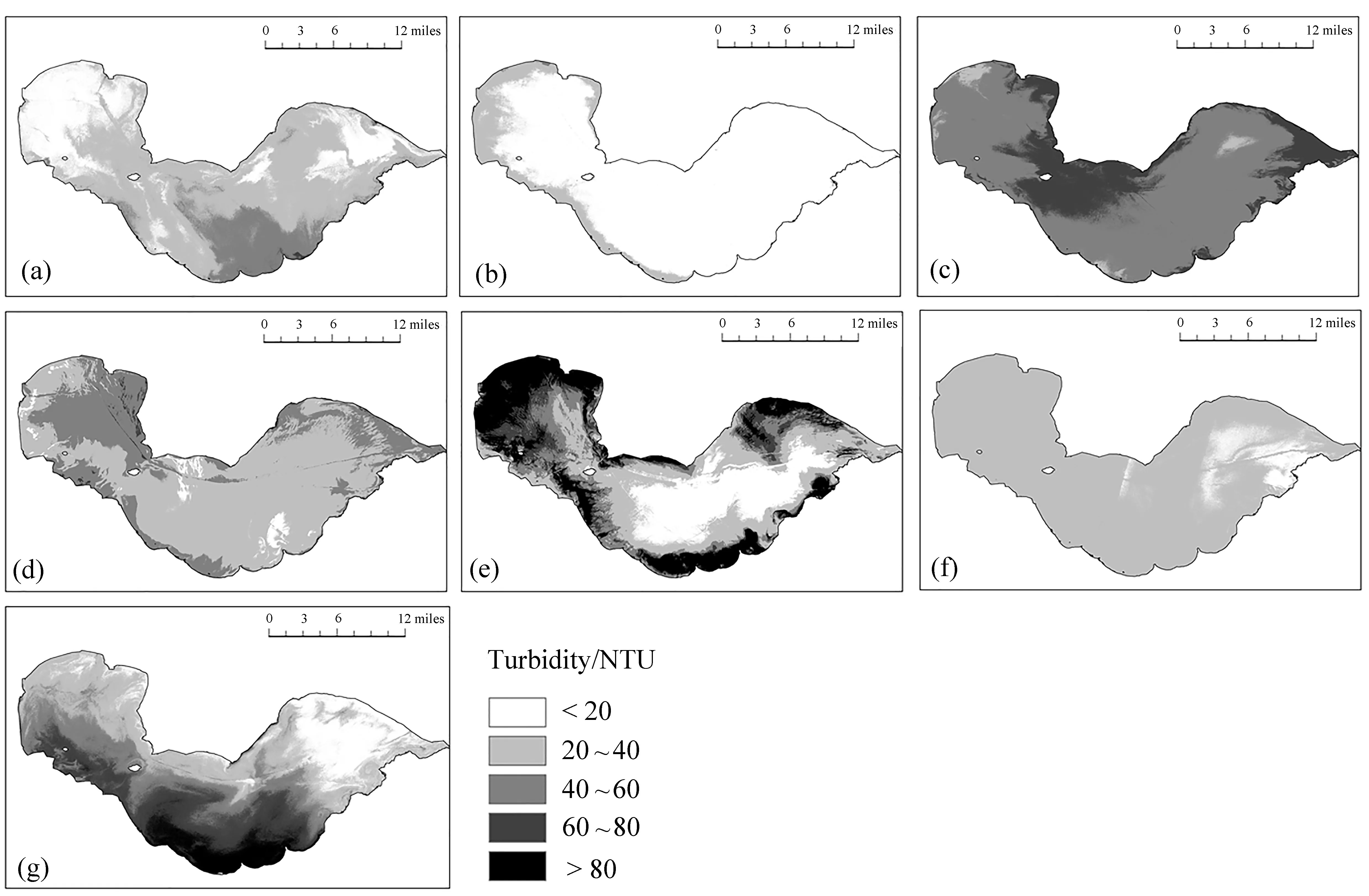
图6 巢湖浊度的遥感定量反演。(a)2019-01-17;(b)2019-03-11;(c)2019-05-03;(d)2019-05-23;(e)2019-10-30;(f)2019-12-11;(g)2019-12-31Fig.6 Remote sensing retrieval of turbidity of Chaohu Lake.(a)January 17,2019,(b)March 11,2019,(c)May 3,2019,(d)May 23,2019,(e)October 30,2019,(f)December 11,2019,(g)December 31,2019
根据划分的浊度等级,将大于40 NTU的水体提取出来,按照时间序列对提取的面积进行对比,结果如图7所示。经统计分析,5–10月为蓝藻爆发时间段,巢湖浊度大于40 NTU的面积高于大部分其他时段,12月31整体浊度较高可能受风场等因素影响。根据合肥气象局信息,当天偏北风4级,阵风7级转东南风3级,强风使得水中沉积物发生再悬浮,进一步导致巢湖整体浊度较高。

图7 浊度大于40 NTU的水体面积统计Fig.7 Statistics of water area with turbidity greater than 40 NTU
5 结 论
选取巢湖作为研究区域,利用浮标检测站浊度数据和遥感定量反演的方法分析了2019年巢湖浊度的时空变化规律,得到了以下结论:
1)通过对高频次连续的浮标检测站浊度数据分析,发现巢湖水体浊度具有高动态特性,研究结果表明在5月、10月蓝藻爆发时间段巢湖浊度日间变化程度比其他时间更加显著。
2)从巢湖浊度的遥感定量反演模型中发现,浊度对红色波段、近红外波段的反映比较敏感;遥感反演结果表明蓝藻爆发时间段,即5–10月的巢湖整体浊度要高于其它时间段,12月31日的浊度较高,可能受气候条件等因素影响;总体来说,西半湖、兆河入湖区、巢湖船厂及附近沿湖北岸浊度较高,主要受人类活动和入湖河流的影响。
3)卫星受到重访周期和天气因素的影响,很难实现对湖泊水环境变化的有效捕捉,而浮标检测站监测方式可以弥补这一不足。但浮标检测站监测只能反映某一点位的水质情况,而卫星遥感监测可以与之形成互补,实现大面积动态监测。因此可以将浮标检测站监测和遥感监测相结合,提高湖泊水环境动态监测能力,这种空地监测结合分析为其他内陆湖泊的水质监测提供新思路。
4)不足之处在于受到水面实测点个数的限制,得到的反演模型具有一定的局限性,后续会积累数据做更进一步的研究。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
汽车实用技术(2022年16期)2022-08-31 07:02:58
安徽文学·下半月(2018年10期)2018-11-15 07:05:00
黑龙江科学(2016年15期)2016-03-15 21:04:13
水生生物学报(2015年1期)2015-02-28 16:01:05
大众考古(2014年7期)2014-06-26 08:00:56
中国交通信息化(2014年7期)2014-06-05 03:18:40