基于视频图像的能见度计算方法研究
2021-04-24 09:35:28蔡熠杨卓敏张智方蔚恺余东升张战盈杨喆徐赤东
大气与环境光学学报 2021年2期
蔡熠,杨卓敏,张智,方蔚恺,余东升,张战盈,杨喆,徐赤东∗
(1中国科学院合肥物质科学研究院安徽光学精密机械研究所基础科学研究中心,安徽 合肥 230031;2公安部交通管理科学研究所,江苏 无锡 214151)
0 引 言
大气能见度是气象观测的主要参数之一,反映了大气中粒子的浓度以及大气环境质量,其大小受到亮度对比度以及大气透明度的影响[1]。大气能见度不仅在环境质量检测、气象分析以及遥感反演中有着重要意义,还影响着人们的日常生活[2]。在交通运输领域,雨、雪、雾、霾等天气状况作为主要影响大气能见度的因素,也是导致交通事故频发的关键因素。同时,由于城市化建设的快速进行、社会基础设施的建设以及汽车排放量的增多等多种原因,能见度较低的天气情况也常有出现。因此,大气能见度的检测以及准确估算,对于交通安全、室外机器视觉探测以及日常出行具有重大意义。
常用的大气能见度检测手段主要分为三种:目视判别法、机器测量法以及视频检测法。其中目视判别法是通过人眼观测得到的最大距离来获得大气能见度,但该方法因受到观测物以及观测人员自身经验的限制而具有很大的局限性。机器测量法则是近年来交通部门常用的检测手段,其通过能见度仪对大气能见度进行测量,但是该方法受价格、布设条件等限制,难以大范围应用[3]。视频检测大气能见度方法通过分析大气光学特性、图像特征等并利用多种处理算法进行大气能见度提取,该方法相较于机器测量法具有获取数据便捷、成本较低等优势,同时视频检测法可同时测量一定视野范围内的多个目标,且保存的图像中还包含有观测场地的状况等信息,因此利用视频检测法提取大气能见度是现今的热门方向[4]。
近年来,利用图像进行大气能见度提取的相关研究获得了很大进展。2008年,Tan[5]研究了极端天气(如雾霾天气等)下利用单幅图像进行大气能见度的提取;2016年,赵瑞等[6]在暗原色先验理论的基础上进行了大气能见度的测量研究;同年,周凯等[7]在暗通道先验理论的基础上引入了最小图像熵来提取雾霾污染下的大气能见度信息;2019年,赵晓东等[8]提出了一种基于图像快速傅里叶变换(FFT变换)的大气能见度算法,该方法通过分析图像的频谱特征来提取大气能见度;同年,陈钟荣等[9]针对传统能见度提取方法的复杂性和准确性差等问题,提出了一种自适应雾浓度系数的神经网络算法,提高了大气能见度的提取精度。
本文采用视频检测法作为大气能见度的主要获取手段,基于暗通道反演法进行合肥市大气能见度的提取与研究,并利用相同测量条件下的激光雷达能见度实测数据对视频影像的能见度提取结果进行了对比分析。
1 大气能见度提取方法
1.1 大气能见度
观测遥远目标物时,只有当这个目标物和它的背景之间有相当程度的亮度和色彩差异,才能把它从背景中识别出来,其中起决定性因素的是亮度差异。光亮度对比定义为目标物光亮度和背景光亮度之差与目标光亮度的比值,可表示为

式中:C表示的是目标物与背景之间的亮度差异对比,又被称为固有亮度;参数L0为背景光亮度;参数Lb为目标光亮度。由于光亮度对比并没有考虑到实际大气的作用,因此实际上透过大气观察目标时,常用视亮度来表示,其定义为固有亮度与对比传输系数的乘积,表达式为

式中:C′表示视亮度,Y为对比传输系数,DR为大气采样空气柱亮度,tR为大气透明度,下标R为观测者到观测目标的距离。若观测时,以天空为背景,则Y又可表示为

式中:参数σ为大气消光系数。假设大气均匀,则气象能见度与消光系数之间的关系为

式中:VR为气象能见度,ε为对比感阈值。式(4)又被称为柯西米德(Koschmieder)能见度公式。实际应用中,常常将ε视为常数,地面测量时一般取0.02,航空作业时则取0.05。
1.2 暗通道先验理论
在恶劣天气下,目标物发射出的光线在传输到观测仪器的过程中由于大气中粒子(如雾、霾等)的作用而发生衰减,这一过程采用计算机机器视觉和计算机图像学中的模型[10]描述为

式中:x表示像素坐标,I(x)为观测到的衰减后图像,J(x)表示为目标物的原图像,t(x)为传输过程中的总透过率,A为大气背景光强度。等式右边第一项被称为直接衰减项,第二项为大气光强度项。其中直接衰减项描述的是目标图像在大气传输过程中的衰减,大气光强度项则表示了大气中的散射光对图像场景颜色造成的偏移。
假设观测过程中大气均匀,则大气总透过率为

式中:参数β为大气的散射系数,d为景深。在观测图像为RGB图像的基础上,假设图像中的像素在某个通道总存在趋近为0的点,则定义该通道为图像的暗通道,则

式中:Jdark(x)为图像J的暗通道,Jc(y)表示原图像J的颜色通道c的图像,Ω(x)为以像素点x为中心的小范围区域。在给定大气光强度A的情况下,对式(5)两边分通道取最小值,则

对于原目标图像,假设Jdark(x)=0,同时考虑到实际大气中存在粒子的影响引入去雾因子ω(0≤ω≤1),根据式(8)可以得到透过率的计算公式为

2 观测目标区域选取
根据能见度暗通道先验理论可知,进行能见度观测实验时,视场中必须存在非天空的区域,一般情况下该区域在图像中的像素较低。在安徽省合肥市科学岛实验楼开展了能见度观测实验,观测方向为水平南向,观测视野中包含的场景有:树木、建筑陆面、水面、天空、河岸。选择2016年5月14日06:00–18:00的观测图像作为研究数据。图1(a)–(c)分别为北京时间06:00、12:00、18:00的观测场景。图2为三个时刻对应灰度图的直方图分布。从图1和图2可以看出,不同时刻下观测场景的雾浓度具有差异性,其图像对应的直方图灰度分布也略微不同。

图1 2016年5月14日06:00(a)、12:00(b)、18:00(c)的能见度观测场景Fig.1 Scenes of visibility observation at 06:00(a),12:00(b),18:00(c)on May 14,2016

图2 2016年5月14日06:00(a)、12:00(b)、18:00(c)观测场景的灰度直方图Fig.2 Gray histogram of the observation scenes at 06:00(a),12:00(b),18:00(c)on May 14,2016
图3为基于暗通道先验获得的北京时间06:00的暗通道图像。针对目标场景选择需要处理的区域,如图中所示的矩形框中区域1和区域2,其中区域1中的场景为树冠,距离观测仪器150 m;区域2中的场景为河岸,距离观测仪器为4 km。两个区域的暗通道灰度直方图如图4所示,由图可知,区域1[图4(a)]的灰度较低,与天空背景差异较为明显,且视场中目标物状态较为稳定,适合进行能见度计算;区域2[图4(b)]中目标受雾霾天气影响灰度较大,与天空背景对比度较小,不适用于能见度的提取研究。因此,研究时主要选取区域1进行能见度的提取与分析。

图3 暗通道图像Fig.3 Dark channel image
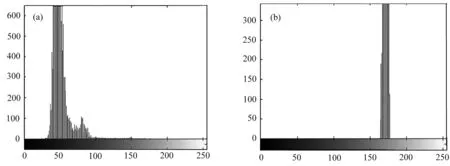
图4 选定目标区域的暗通道直方图Fig.4 Dark channel histograms of the selected target areas
3 能见度结果与分析
利用暗通道对应的图像亮度以及大气亮度根据式(9)可得到对应区域的大气传输总透过率值。图5为2016年5月14日06:00–18:00区域1的透过率变化曲线。从图5中可以看出,一天中不同时刻大气传输透过率的值变化并无明显规律性,其值大小受到大气状态的影响。图6为2016年5月14日06:00–18:00区域1的能见度反演结果以及激光雷达实测能见度对比示意图。其中激光雷达能见度数据与观测数据的观测位置相同、观测时间同步,且激光雷达观测为水平观测,观测方向与视频图像观测方向一致。图中实心方块表示激光雷达能见度数据,实心圆表示视频图像反演的能见度结果。从图中可以看出,两种不同测量方式获取的能见度在全天不同时刻下的变化趋势一致,重合度较高。图7所示为视频影像能见度提取结果与激光雷达能见度实测数据的误差随观测时间分布曲线。从图中可以看出能见度误差最大时为36.012%,最小时为0.079%,平均误差为10.596%,标准误差为9.216%。图8所示为2016年5月14日全天的基于视频图像的能见度提取结果与实测激光雷达能见度数据相关性拟合曲线。利用最小二乘法构建二者的一元线性方程,拟合结果表明,其相关性方程的缩放系数为0.98562,偏移量为0.23814,两组数据的Pearson相关系数为0.96616。

图5 2016年5月14日06:00–18:00区域1透过率变化曲线Fig.5 Variation curve of transmittance in region 1 from 06:00 to 18:00 on May 14,2016

图6 2016年5月14日06:00–18:00区域1能见度反演结果与激光雷达实测能见度对比Fig.6 Comparison of the visibility inversion result with the measured visibility of lidar on region 1 from 06:00 to 18:00 on May 14,2016

图7 能见度误差随时间变化曲线Fig.7 Curve of visibility error with time

图8 反演结果与实测数据相关性拟合曲线Fig.8 Fitting curve of correlation between the inversion results and the measured data
4 结 论
重点研究了基于视频图像的能见度的观测和提取。利用暗通道先验理论,选择与天空背景对比度较大的目标研究区域并进行大气能见度的提取。选取2016年5月14日全天整点时刻的观测图像进行能见度计算,并将能见度结果与同位置同时刻下激光雷达能见度观测数据进行对比。结果显示,能见度平均误差为10.596%,标准误差为9.216%;二者之间的吻合度较高,拟合的相关系数为0.96616。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:56
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
小天使·六年级语数英综合(2017年5期)2017-05-27 20:14:50
中国交通信息化(2016年6期)2016-06-06 07:11:30
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10
公民与法治(2016年23期)2016-05-17 04:21:08