某海工船电力推进系统机桨匹配仿真研究
2021-04-23 03:18刘洪亮乐小龙吴志华
船电技术 2021年4期
刘洪亮,乐小龙,翁 爽,吴志华
应用研究
某海工船电力推进系统机桨匹配仿真研究
刘洪亮,乐小龙,翁 爽,吴志华
(上海船舶研究设计院,上海 201203)
电力推进系统在船舶的应用越来越广泛,电力推进系统可适应工况复杂、综合电站的工况需求,比较适合海洋工程船使用,目前海工船采用电力推进系统的方式也成为主流。某海工船采用电力推进系统进行船舶推进,其推进系统启动到加速时间偏长,而修改电机转速上升时间的时间越短,推进短时所需要的功率越大,导致电机短时承受的转矩越大。本文介绍了该船电力推进系统,建立了该船舶的船机桨的模型,通过仿真,分析了启动过程中船机桨的匹配性以及电力推进系统与操纵相关的参数的合理性。
电力推进系统 仿真 船机桨
0 引言
船舶电力推进系统是指采用电动机驱动螺旋桨推动船舶行进的推进系统。交流电力推进系统由柴油发电机组、配电系统、变频驱动系统、推进器等构成。随着电力电子技术的发展,电力推进系统在不同船型应用越来越广泛[1]。
由于海洋工程船舶工况比较复杂,大部分具有DP的要求,因此其电站需要由多台机组自由组合,根据用电负荷选择投入运行的发电机组台数,使运行机组始终运行于高效工作区,保持燃油消耗率最低,实现最大的经济性,提高续航力,降低运行成本。同时船舶全船动力用电、生活用电、其他辅助用电均由统一的综合电站提供,既满足设备的冗余要求,也具有较好的电站储备。
从原理上来讲,由于推进电机的动态响应特性要优于传统的推进柴油主机,因此电力推进船舶的操纵性能优于柴油机推进船舶,可以大大提高的船舶的机动性。某海工船采用交流电力推进系统,但在实际操作中,发现其启动到加速至满速的时间偏长,而提升电机转速,上升时间越短,推进短时所需要的功率越大,导致电机短时承受的转矩越大。因此需要建立船-机-桨的模型,通过仿真分析推进系统参数合理的匹配性。
1 某海工船电力推进系统简介
本船设计为海洋工程船,采用的推进型式为全回转舵桨,采用电力推进系统。主要船体参数如下:总长:79 m,型宽17.6 m,型深7.7 m,设计吃水6.5 m,设计航速14 kn,载重量3800 t。
主推进电机为鼠笼式水冷感应推进电动机,采用变频驱动,额定功率为1500 kW,额定转速约1000 rpm。齿轮箱减速比为4.76: 1,螺旋桨额定转速约为210 rpm。
本船的电力推进系统单线图如图所示:

图1 船舶电力推进系统单线图
本船电力推进系统由3台1550 kW/3AC690 V/50 Hz的发电机组和1台600 kW/3AC690 V/50 Hz的停泊机组供电,推进系统由变频器驱动推进电机,推进电机配套全回转舵桨实现船舶的推进,并完成船舶的进出港、全速航行、经济航行等工况。
2 电力推进系统及船机桨仿真模型
船机桨的仿真模型主要包括螺旋桨的模型、螺旋桨及电机的工作特性曲线匹配、螺旋桨的推力和转矩模型,船舶阻力模型,变频电机控制模型等[2]。
1)螺旋桨特征及特征曲线拟合
在本文中针对螺旋桨的特性仿真采用四象限螺旋桨特性的形式来进行拟合。将螺旋桨的工况分为四个象限,即第一象限(n > 0,vp > 0),第二象限(n < 0,vp > 0),第三象限(n < 0,vp < 0),第四象限(n > 0,vp < 0)。在n和vp不同时为零时,相应的定义如下[3]:

本文对该特性曲线做切比雪夫多项式拟合,结果如下式[4]:
螺旋桨转矩

螺旋桨推力
2)船机桨系统运动模型
一般传统的船舶的船机桨由推进柴油机、推进齿轮箱、推进螺旋桨构成。本船的船机桨由推进电动机、全回转舵桨构成,其中全回转舵桨包含了齿轮箱结构和推进螺旋桨,螺旋桨产生推力驱动船舶前进,在本文中,动力学方程采用以下模型[5]:

式中,dd为回转部件的转速变化率;为推进电动机的驱动力矩;f为螺旋桨水阻力矩;m为船体的总质量;dv/d为船舶航速的变化率。最终构建的仿真模型如图2,3所示。
3 仿真结果及分析
本船作为海工船对操控的要求较高,在启动过程中,如果时间过长,会导致操作的延时性,造成乘客的体验感下降。而在推进系统的启动过程中,根据电力推进系统驱动回路的特性,又有可能造成电机转矩和功率过载。本项目中主推电机的额定功率为1500 kW,根据船规要求最多可考虑110%的过载能力。

图2 系统仿真模型

图3 船桨仿真模型
工作模式如下:电机转速由变频器控制,按照固定上升或下降斜率调节电机的转速。推进电机控制设置转矩限幅和功率限制。
仿真中暂时按照启动时间35 s进行仿真设计,即螺旋桨35 s内可从零转速到额定满转速,仿真器的时间设定为1000 s。
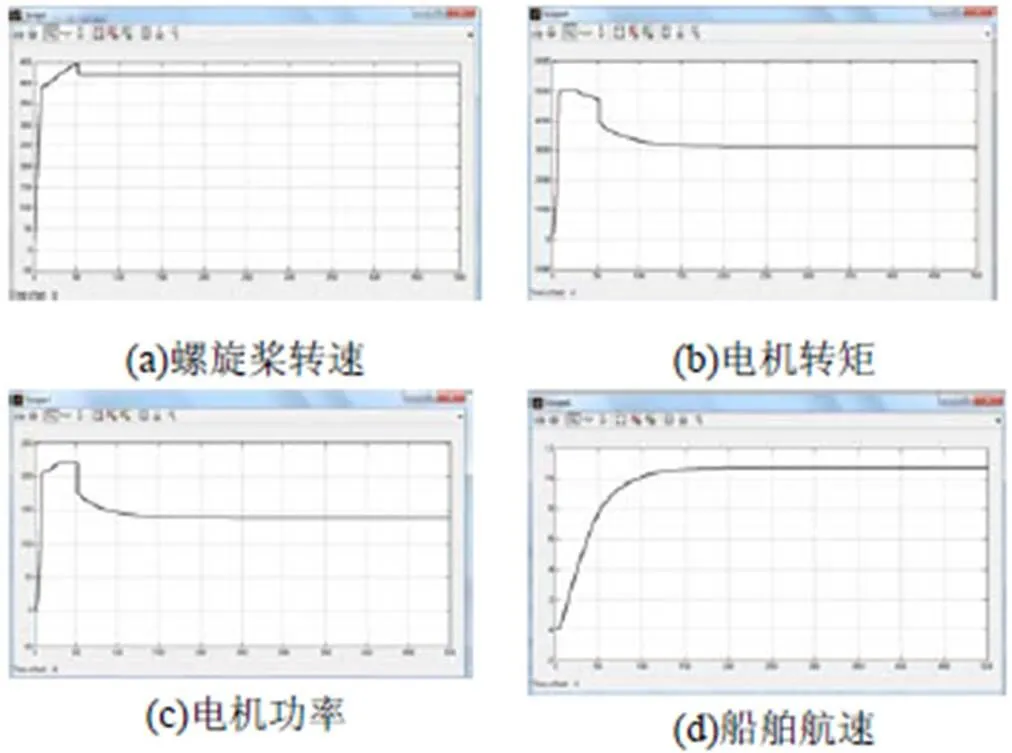
图4 启动情况下的仿真波形
该工况下仿真波形如图所示,船舶稳定计算所得航速为14.4节,与本船设计航速基本相当。但由于在启动过程中螺旋桨所需转矩较大,而此时推进电机的转矩和功率处于上升阶段,转矩和功率处于限制情况,因此电机转速会出现超速的情况,最大转速为222 rpm(超速6%)。从140 s开始,推进电机不再出现功率限制或者转矩限制,原因是此时船舶航速到达一定的值,所需的螺旋桨转矩有所降低,最终工况趋于平稳。
由前面分析可知,因启动时可能会造成电机的转速超调较大,且引起推进电机转矩和功率限幅值限制,因此可改变推进电机调速参数,增大变频驱动回路中的积分常数,其仿真结果如下:

图5 启动情况下的仿真波形

图6 启动情况下的仿真波形
由仿真波形图5可知,当增大速度控制环PI调节器的积分时间常数Ti后,速度超调减小,最大转速为219 rpm(超速4.32%)。此时,推进电机均不出现转矩和功率限幅的情况。但是螺旋桨到达额定转速的时间加长,且航速增速变慢。螺旋桨转速与实际给定转速在启动过程中偏差较大。因此积分时间常数较大的PI对启动有较大影响,考虑到转矩和功率限制问题,以下仿真均采用积分时间常数较大的PI控制参数。
在进行PI参数调节后,将启动时间设定为船舶目标值的20 s,螺旋桨可从零转速到额定满转速,仿真时间为1000 s。
由仿真波形图6可知,此时在进行PI参数调节之后,其他速度控制参数保持不变的情况下,推进电机的转矩和功率均未到达限幅值,且螺旋桨转速、推进电机转矩及功率、航速等均变化较小。因此在采用较大的PI调节参数,可有效改善电力推进系统启动特性,满足最终的设计目标。
5 小结
本文在MATLAB中仿真建立了电力推进系统的船机桨模型,在仿真模型中分析了启动过程中船机桨的匹配性,分析结果显示,当电机的启动斜坡时间过大,变频器PI参数未调节时,限制了电机的转矩和功率,可能会出现电机超速的情况,而在增加变频器的PI参数后,不会出现限制转矩和功率的情况,可改善电力推进系统船舶的启动特性。
[1] 高海波. 船舶电力推进系统的建模与仿真[D]. 武汉: 武汉理工大学, 2008.
[2] 胡倩. 电力推进船舶异步电机矢量控制研究[D]. 镇江: 江苏科技大学, 2015.
[3] 孙洪波. 螺旋桨逆转工况下船舶运动建模与仿真 [D]. 大连: 大连海事大学, 2007.
[4] Li Dianpu,Wang Zongyi, Chi Haihong. Chebyshev Fitting Way and Error Analysis for Propeller Atlas across Four Quadrants[J]. Journal of Marine Science and Application, 2002(1):52-59.
[5] 冒如权. 电力推进船舶制动电阻设计研究[J]. 船电技术, 2016,8: 36-40.
Simulation Research on Working Condition Matching Charaterristic of Propulsion Motor and Propeller of the Electric Propulsion System for an Offshore Ship
Liu Hongliang, Yue Xiaolong, Weng Shuang, Wu Zhihua
(Shanghai Merchant Ship Design and Research Institute, Shanghai 201203, China)
U674.3
A
1003-4862(2021)04-0054-04
2020-09-28
刘洪亮(1985-),男,工程师。研究方向:船舶与海洋工程研究设计。E-mail: liuhongliangsdari@163.com
猜你喜欢
航空发动机(2020年3期)2020-07-24
四川冶金(2018年1期)2018-09-25
中国化肥信息(2018年3期)2018-01-30
兰台世界(2017年10期)2017-06-01
知识经济·中国直销(2017年3期)2017-04-16
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
现代企业(2015年4期)2015-02-28
中国塑料(2014年12期)2014-10-17
环球时报(2014-08-02)2014-08-02