单晶硅窄缝化学机械抛光的控制系统设计
2021-04-22 03:22乔晨翊王昆
数字技术与应用 2021年2期
乔晨翊 王昆
(同济大学机械与能源工程学院,上海 201804)
0 概述
单晶硅是具有优异的光学性能、极高的反射率和很高的折射系数的半导体材料[1]。在室温时,单晶硅的禁带宽度为1.12eV,虽然其在可见光谱范围内是不透明的,但可被接近红外光谱频率的光线所穿透,因此单晶硅被广泛应用在制作接近红外光谱频率的光学元件、红外及γ射线的探测器和太阳能电池等用途上[2]。单晶硅也常被用于制作衍射晶体,在材料化学、凝聚态物理、高能物理等不同领域得到广泛应用[3]。
适用于单晶硅这类硬脆材料的抛光加工技术主要有离子束抛光(IBF)、磁流变抛光(MRF)、射流抛光、气囊抛光和化学机械抛光(CMP)[4],其中化学机械抛光是唯一能做到全局平坦化的技术[5]。CMP抛光主要是利用氧化反应使得材料原子分子之间的键能被削弱,从而形成新的氧化分子层,在抛光磨粒的机械磨削作用下实现材料的去除。
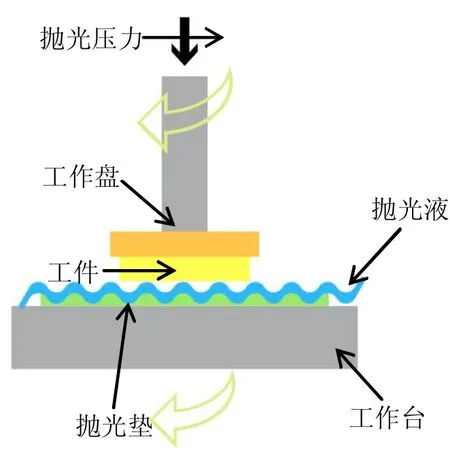
图1 化学机械抛光加工示意图Fig.1 Schematic diagram of chemical mechanical polishing
本文在继承传统的化学机械抛光技术的基础上,如图1所示,由PC机+固高GTS-800-PV(G)_PCI系列运动控制器构成的开放式控制系统,设计了化学机械抛光控制系统,这套控制系统可以针对不同规格的单晶硅晶片计算出最有效的运动参数,得到符合表面质量要求的单晶硅窄缝表面。
1 控制系统硬件设计
单晶硅化学机械抛光技术的主要运动形式由旋转运动与水平往复运动组合而成,因此需要以下控制设备,如图2所示。
(1)具有PCI接口的计算机;
(2)YASKAMA Σ-7伺服电机;
(3)YASKAMA Σ-7伺服单元;
(4)+24V直流电源(用于接口板电源);
(5)固高运动控制器。

图2 单晶硅化学机械抛光控制系统组成Fig.2 Composition of single crystal silicon chemical mechanical polishing control system
伺服电机有两种选择:(1)交流伺服电机;(2)直流伺服电机。在本系统中,将具有PCI接口的计算机设置为上位机,下位机为固高运动控制器的PCI串口通讯。通过连接电缆将上、下位机连接在一起。运动控制器由24V直流电源供电。运动控制器正常工作时,控制模式为开环控制能,并能提供两种不同的信号(正脉冲/负脉冲和脉冲+方向)。
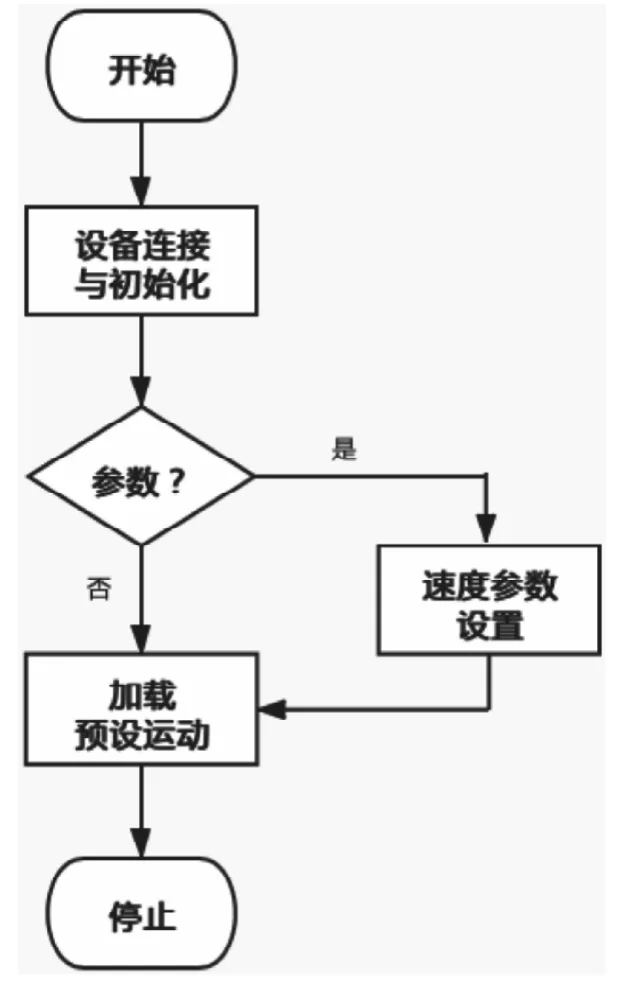
图3 抛光设备工作流程图Fig.3 Work flow chart of polishing equipment
抛光的工作流程可以概括为:单晶硅片固定在X轴电动平移台上,平移台上有Y向与Z向的平移台,可调节硅片与抛光垫的相对位置。电动平移台使硅片做X方向的水平往复运动,同时抛光板两端分别连接一个旋转伺服电机,通过固高运动控制器使两电机做同向同步旋转运动,运动速度可通过程序进行设置调整,使抛光板在XY平面内做平行四边形运动。完成单晶硅的化学机械抛光。
2 控制系统软件的设计
抛光工程流程可简化为如图3所示的流程图。
影响表面粗糙度的关键因素分别是抛光板和工件的速度、两者的运动轨迹[6]。水平电动平移台通过USB接口将伺服单元直接连接至电脑,再运用YASKAMA公司的软件Sigma Win+,进入“JOG程序运行”。“JOG程序运行”是指以事先设定的运动模式(移动距离、移动速度、加减速时间、等待时间、移动次数)执行连续运行的功能,在设定时不连接上位机,可以确认伺服电机的动作,执行简单的定位动作[7]。参数设置界面如图4所示。将JOG运行模式设置成Pn4或者Pn5模式,即(等待时间正传移动等待时间反转移动)×移动次数,完成水平往复运动。

图5 旋转电机控制主界面图Fig.5 Rotating motor control main interface diagram
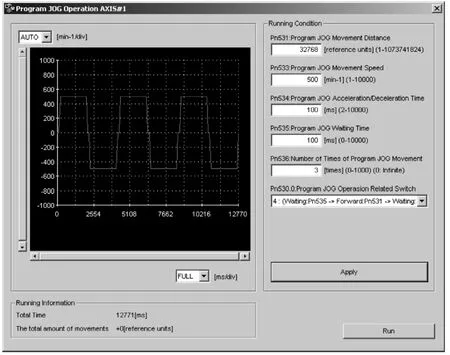
图4 Sigma Win+Jog程序运行界面Fig.4 Sigma Win+Jog program running interface
图6 单晶硅抛光样件Fig.6 Monocrystalline silicon polishing sample
两旋转电机通过固高运动控制器实现同步运动。固高运动控制器可以通过支持动态链接库的开发工具来开发应用程序从而控制电机达到变速的效果。目前较为便捷的可视化编程软件中,C++Builder应用较为广泛。本文运用Borland公司的C++Builder对两个旋转电机的同步变速运动进行编程。程序分为三个部分:创造主界面、主程序的编写、电机同步可变速运动的实现。
首先要建立上位机与运动控制卡之间的通讯。调用GT_Open()函数打开运动控制卡。随后,调用GT_Reset()将运动控制卡的所有寄存器恢复到初始状态。接下来需要调用GT_LoadConfig()函数配置运动控制器,此时配置文件取消了各轴的报警和限位。通过GT_ClrStr(1,8)清除各轴的报警和限位[8]。
接下来简单介绍两轴的运动模式的编写。因为有两个旋转电机,因此引入两个变量分别是AXIS1和AXIS2。可以实现两轴同步旋转的运动模式有两种:(1)两轴分别设置JOG模式,但需要保证两轴初始位置相同;(2)电子齿轮模式,但从动轴的传动比从0逐渐增大到设定的传动比需要一段离合区。离合区越大,从动轴传动比的变化过程越平稳。因为两个轴之间有一块抛光板连接,需要保证两轴始终同步且平稳的运动,因此选用JOG模式比较合适。
调用GT_PrfJog(AXIS)函数将两个轴的运动形式定义为JOG模式。建立一个Form,可在框内输入速度值,如图5所示。在所有工序都完成后,需调用GT_Stop(),使电机以0.0625脉冲/毫秒2的减速度平缓的停止。
3 实验结果
采用本文设计的单晶硅化学机械抛光系统,按照规定方法对120mm×55mm×6mm的单晶硅晶片进行抛光,可得到如图6所示单晶硅样本,表面粗糙度可达到1nm左右,满足表面粗糙度要求。
猜你喜欢
微特电机(2020年11期)2020-12-30
法大研究生(2020年2期)2020-01-19
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
光学精密工程(2016年2期)2016-11-07
电源技术(2016年2期)2016-02-27
黑龙江省政法管理干部学院学报(2015年4期)2015-03-26
江苏大学学报(自然科学版)(2014年6期)2014-02-28
科技传播(2011年6期)2011-08-15
电子世界(2004年6期)2004-07-27