
航测与SLAM测量技术融合在房地一体中的应用*
2021-04-21 13:40:50邓汝艳
地矿测绘 2021年1期
邓汝艳,董 蕾
(1.广州市规划和自然资源自动化中心,广东 广州 510030;2.广州南方卫星导航仪器有限公司,广东 广州 510000)
0 引言
农村房地一体化是指对农村宅基地和集体建设用地使用权及所有权、地上房屋所有权,实行统一权籍调查、统一确权和统一颁发证书[1]。就不动产测量方式而言,传统测量方式通常是采用全站仪或GPS-RTK等进行测量,传统方式采集房地基础数据精度较高,但工作量大、生产周期长,无法满足信息化时代对于测量数据更新的时效要求[2]。伴随着测绘技术装备的不断发展,新型测量装备在测量效率和人工劳动强度方面有了很大优化。以无人机摄影测量为例,在外业数据采集方面,无人机摄影测量技术能快速获取测区影像数据,极大提高外业数据采集效率;在内业数据处理方面,利用航测软件可快速生产DEM、DOM、DSM以及高分辨率三维模型等,从而能大大缩短房地一体化测量基础数据生产周期[3-4]。
关于无人机航测和SLAM移动测量技术应用于测图方面,国内外已有相关研究:张天乔[5]融合SLAM移动测量技术和无人机倾斜航测技术,采用融合技术采集测区三维点云数据,应用于农村地籍图测制中,有效提高数字测图效率,通过精度分析验证,精度结果满足农村权籍调查精度要求;王果[6]等人采用基于倾斜摄影测量技术采集农村房地基础数据,建立宅基地实景三维模型,通过三维测图来生产房屋权籍图,为房地一体化确权提供数据技术支持;耿长良[7]研究SLAM移动测量技术在轨道交通测图方面的应用,在无GPS信号的条件下,利用SLAM技术采集地下空间三维点云数据,完成轨道交通竣工测图任务。
1 航测与SLAM技术融合
从无人机航测技术出发,无人机可从垂向或倾斜方向获取地面多方向的影像数据,后期内业构建的实景三维模型也直观地反映了地面情况,极大提高数字化测图的效率[8]。
航测数据处理方面,针对平原地区以及道路规划有序、房屋排列整齐的地区,无人机航测能大大提高房地一体化基础数据采集效率且精度良好,但对于山区树林遮挡严重或者农村房屋搭建混乱的地区,航测无法完全获取建筑物的全方影像数据,从而导致三维建模点云数据缺失,故还需要采用其他手段作为无人机航测方式的补充手段[9],针对航测内业处理存在诸多难点问题展开研究。
1.1 航测内业判读难点1.1.1 建筑物排列紧密
农村居住环境通常分布集中,建筑物排列紧密,房屋搭建错综复杂,导致内业判读十分困难,仅仅通过航空测量判读地物界限容易造成判读与实际房屋搭建情况不一样,从而影响房屋权籍判断,导致后期权籍纠纷。
1.1.2 建筑物隐蔽点
内业影像判读时,时常面临建筑物存在很多隐蔽点从航测影像上无法判读等问题,由于农村房屋有廊檐情况十分普遍,建筑物隐蔽点仅从内业无法判读,内业无法准确测量房屋廊檐长度,从而降低房屋面积测量准确度。房屋廊檐,如图1所示。

图1 房屋廊檐
1.1.3 树林遮挡
茂密树林遮挡建筑物是航测内业判读存在的另一个困难。由于无人机航测从上方拍摄影像,当房屋周边植被过于高大茂密时,会遮挡住房屋整体轮廓,导致航测内业无法准确判断房屋轮廓,造成房屋面积量测不准确等问题。
综上所述,无人机航测技术在房地一体化项目实施中存在一些航测内业难点问题。目前多数解决办法是采用实地人工补测内业无法判读的地区[10]。针对航测内业存在的痛点问题,现研究采用SLAM移动测量技术来优化传统人工实地补测手段,提高外业补测效率和精度,减少外业工作量,从而解决航测内业判读问题。
1.2 SLAM概述
SLAM移动测量技术为房地一体化提供了新的测绘手段。SLAM(Simultaneous Localization and Mapping)即实时定位与地图制作[11],是一个具备三维激光扫描功能的综合扫描系统,随着激光扫描仪自由移动,即可实时扫描获取到周围环境的三维点云数据,扫描仪具备POS系统可实时计算仪器的姿态数据,系统计算出周围空间的相对位置关系。
1.3 SLAM原理
SLAM综合扫描系统核心部分由三维激光扫描仪器(Laser Scaner)、惯性测量单元(Inertial Measurement Unit,简称IMU)以及SLAM算法等部分组成。三维激光扫描仪采集空间数据;惯性测量单元实时获取仪器方位姿态数据;SLAM算法最为至关重要,直接决定SLAM综合扫描系统的整体测量精度。激光测距仪计算的距离数据和IMU获取的姿态POS数据,这些是SLAM算法确定位置要素的核心计算要素,系统实时计算三维角度等空间位置信息,从而确定SLAM扫描系统和周围空间物体的相对空间位置关系[12]。SLAM测图系统,如图2所示。

图2 SLAM测图系统
1.4 SLAM优点
SLAM具有如下优点:
1)高精度:SLAM移动测量技术可实时获取周围三维空间信息,测量精度控制在0.05 m内。
2)高效率:SLAM测图是“面”测量方式,相较于传统“点”测量方式,测量效率有了极大的提升,最快速度达到每秒10万点。
3)限制少:SLAM测量方式自由,仪器轻便于携带,可在无GPS信息条件下进行测量,方便进入狭窄区域测量,有效突破了无GPS信号无法测量的限制。
2 工程案例
2.1 测区概况
本次工程项目位于贵州榕江县,测区地形为丘陵地带,地势为广西丘陵过渡的边缘地带,地势自西北向东南倾斜,中间地势低落,山地特色明显,地区高程起伏较大,项目区域涉及农房、道路、沟渠、农田等,测区面积约67 km2。
2.2 无人机航测
首先,外业布设像控点,规划测区航飞线路后,进入无人机航测环节,外业航测采集测区地形影像数据,将全部影像导入航空影像测图软件,完成影像数据预处理,影像匹配获取地物的点云数据,软件根据点云数据的高程信息制作数字高程模型(DEM),正射纠正航拍影像,输出本次航测区域的数字正射影像图(DOM),基于DEM、DOM、DSM等成果,制作测区实景三维模型。
三维测图是数字化测图的关键,三维测图是根据实景三维模型进行地物判断与测量,根据影像判断地面轮廓关键点,如房角、农田的四角等,矢量化采集特征地物的点、线、面信息,并根据影像赋予地物要素属性信息,矢量化采集基础数据并制作地籍图。三维测图,如图3所示。

图3 三维测图
本次房地一体化项目主要采集的对象为农村房屋和农田,根据三维模型准确量测房屋面积、建筑面积、楼层信息、农田耕地面积等,为房地一体化提供基础数据。测区大部分区域采用航测手段进行基础数据采集,但针对航测内业无法判读的航测难点区域,如树林遮挡、楼层搭建错综复杂等情况,采用SLAM测量技术实地补测。
2.3 SLAM测图流程
开展外业SLAM补测大致经过外业数据采集、数据处理、点云测图等几个过程。SLAM测图流程,如图4所示。

图4 SLAM三维测图流程
测量员到达补测区域后,首先要明确测区划分情况后,现场踏勘了解测区大致情况,结合航测影像明确补测区域和补测对象后,安装设备及仪器测试正常后,正式开展外业数据采集工作。
2.4 数据采集与处理
测量员手持ZEB-REVO扫描仪进行室内外数据采集,即便在无GNSS定位信号的区域,SLAM技术依然可以完成数据采集任务,扫描仪采集数据与测量员行动同步,随着行走的路径即刻采集周围环境的三维点云数据。
外业补测完成后将点云数据(.las)导入三维点云后处理软件JRC。经过预处理筛选粗差后,首先将对应测区内控制点录入点云处理软件,之后通过相对位置关系解算出SLAM移动测量轨迹,通过轨迹计算出移动轨迹周围的点云数据。基于区域的点云数据、人工移动轨迹以及航测影像可以综合判读测区内的地形地物。SLAM轨迹解算,如图5所示。
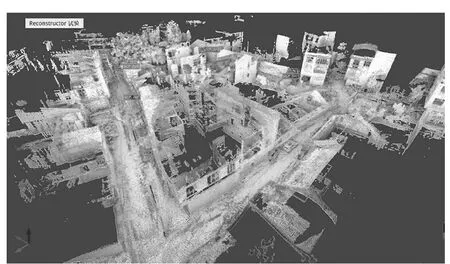
图5 SLAM轨迹解算
2.5 点云切片测图
点云坐标是空间位置信息,点云测图是基于空间位置信息为基础。通过JRC“点云查询”功能,可直接查询点云模型中某一点的空间位置。图6为测区内某房屋右上角点云坐标(X,Y,Z)。

图6 点云查询
点云是三维空间数据,故基于点云空间数据可制作测区整体三维效果,通过点云可查询建筑物的空间位置信息,在软件中可以旋转点云模型,从而清楚地判读房屋楼层、房屋结构、建筑物室内外等信息。此外,还可将测区模型转化为二维平面效果图,软件支持多角度展示工测信息,平面图更加方便直接量测房屋边长、测量房屋面积等。最后通过点云测图,制作补测区域的数字线划图。点云测图,如图7所示。
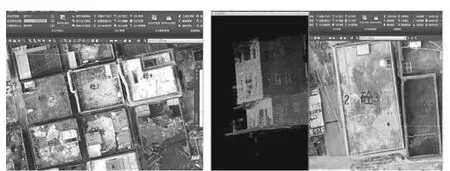
图7 点云测图
2.6 航测成果和SLAM成果融合
外业补测完成后,要融合两种测量方式的测量成果,将航测的三维测图线划成果和SLAM测量成果一同导入南方CASS10.0制图软件中,制作房地一体化数字线划图DLG。
综合判断两种融合地区的地物线划图连接情况,连接区需要人工判断地物位置与类别信息,对包括房屋、沟渠、道路等地物严格按照点、线、面等方式进行地形数据矢量化采集,特别要标注建筑物的类型与面积等基础信息,为房地一体化提供基础数据,完成数字线划图DLG制作后,最后分幅与整饰输出成果。
3 精度验证
为了保证项目成果的精度,要对项目测量成果进行多环节的精度检查,验证测量成果精度能否满足项目精度和相关规范要求。
本项目精度验证方式是同名点对比,即线划图和GPS-RTK实地复测相同的特征点,精度验证环节包括检校点坐标较差、面积较差、测量中误差等。
3.1 检校点
检校点选取时应尽可能均匀分布于整个测区,检校点尽可能选在围墙角、房角等稳定的地物特征点,这样选取的检校点更真实地反应本次实验精度。整个测区共67 km2,以测区内4个村界划分为4个测区,测区共均匀布设56个检校点。本次实验选取第二测区的8个检校点,编号为J1-J8。
3.2 检校点误差分析
首先,对本次GPS-RKT采集的检校点进行平面和高程的精度统计,分析检查点是否满足项目精度要求。检校点的平面和高程中误差统计情况,见表1。
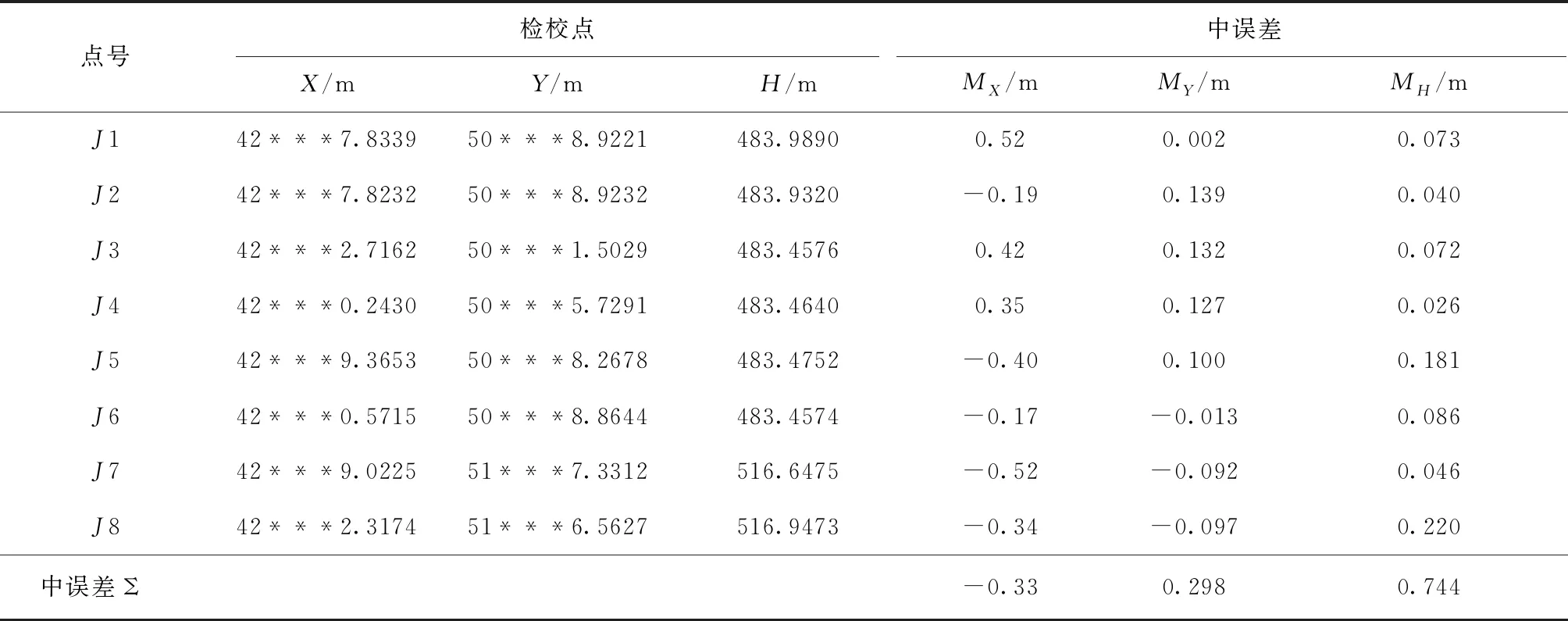
表1 检校点精度分析表
从表1可知,本次GPS-RKT采集的检查点平面精度优于高程精度,平面与高程中误差均满足项目精度抽检要求。故本次外业检查点可以作为抽检项目的检查数据。
3.3 面积较差
房地一体化项目要求对房屋的面积进行精确的测量,故精度验证也包括检验农村各类房屋面积,房屋抽检类型包括砖房、棚房、围墙等,检查主要方式将DLG图中建筑物量测面积与实地抽检房屋实测面积进行比较,面积对比情况,如表2所示。
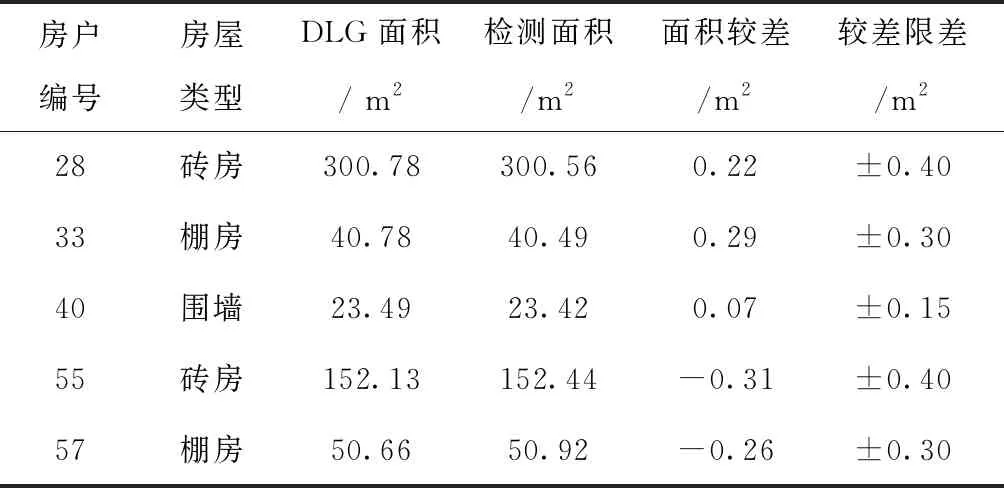
表2 面积对比分析表
由表2可知,将DLG图房屋面积与外业实测建筑物面积进行比较,所有抽检建筑物面积较差均在限差范围内,建筑物面积较差满足CJJ/T 8—2011《房产测量规范》中对于房屋面积精度限差要求[13],且外业测量精度达到实际项目精度要求。
3.4 成果质量分析
通过空中三角测量报告得到测区平差精度,分析测区测点的平差精度,航测精度满足GB/T 6962—2005《1∶500 1∶1000 1∶2000 地形图航空摄影规范》相关精度要求[14],对测区平面特征地物点进行检核,其中平面检核最大中误差为0.25 m,最大高程中误差为0.27 m,均满足项目对于地形图精度的5 cm的要求,外业测量成果可作为房地一体化项目基础数据。
3.5 坐标较差
最后对检校点和DLG同名点进行比较,外业复测采用GPS-RTK测量方式,测量J1-J8点坐标成果,再对比GPS-RKT实测坐标和线划图DLG图中同名点坐标,在相同的坐标系下进行比较坐标较差结果,如表3所示。

表3 同名点坐标对比表
根据表3分析可知,J1-J8测点的坐标较差均在3 cm以下,满足CH/Z 3005—2010《低空数字航空摄影测量规范》相关要求[15],说明本次项目外业测量成果满足精度要求,可作为房地一体化基础数据。
4 结束语
本文详细介绍无人机航测和SLAM移动测量融合技术在农村房地一体化中的应用,首先分析了无人机航测在实际生产项目中面临的难点问题,然后针对航测内业的判读难点开展补测措施,研究SLAM移动测量技术作为航测手段的补充,有效弥补了航测手段在实际应用中的不足。实践证明,该方法能够满足房地一体化项目的精度要求。
猜你喜欢
建材发展导向(2022年12期)2022-08-19 02:32:00
山东煤炭科技(2022年6期)2022-07-14 03:10:40
地理信息世界(2021年2期)2021-08-14 02:11:02
河北地质(2021年4期)2021-03-08 01:59:14
集美大学学报(哲社版)(2020年1期)2020-03-04 03:47:54
中国铁道科学(2019年5期)2019-10-19 07:55:14
中国交通信息化(2019年3期)2019-06-18 11:07:36
测绘通报(2018年10期)2018-11-02 10:07:28
江西建材(2018年4期)2018-04-10 12:37:50
文教资料(2018年34期)2018-03-27 15:41:44
