
水体上方云和云阴影检测算法
2021-04-20 07:53刘杨江涛黄珏
北京测绘 2021年3期
刘 杨 江 涛 黄 珏
(山东科技大学 测绘科学与工程学院, 山东 青岛 266590)
0 引言
云和云阴影的存在会阻碍地物目标与传感器之间能量的传输,对于水色遥感的相关研究而言,会降低卫星数据在水环境监测中的可用性。此外,不同类型水体的光谱特征存在差异,也会对基于光谱分析的云和云阴影检测结果产生影响。因此在云和云阴影检测中考虑水体的光谱特征对提高检测精度具有重要的意义[1-5]。
ZHU等[6]提出Fmask(Function of mask)算法,首先通过多光谱测试对影像中的可能云像元进行标记,其次通过水体测试进行水陆分离并分别进行云检测,实现水陆上方的云掩膜;QIU等[7]人在Fmask的基础上提出了MFmask(Mountainous Fmask)算法,利用数字高程模型(Digital Elevation Model,DEM)数据对Fmask算法中的水体测试进行改进,在提高水陆分离精度的基础上进一步提高云检测的精度。云阴影在遥感影像上具有较低反射率的特性,不仅在几何形状上与云保持着相似性,而且与云像元保持着特定的位置关系[8]。例如王凌等[9]针对Landsat8-OLI(陆地成像仪,Operational Land Imager)影像,利用深蓝和短波红外波段的组合去除了云阴影;刘心燕等[10]针对高分四号卫星,使用了红和近红外两个单波段和彼此之间的波段组合识别了云阴影。通过对比上述的云和云阴影检测算法发现,算法中并未考虑不同水体的光谱特征及其影响。因此本文首先在Fmask算法的基础上,对可能的云像元进行识别;然后基于云与不同水体的光谱特征,利用光谱差异分析技术识别潜在云像元;最后根据云阴影的光谱特征设定基于影像的动态阈值,识别云阴影像元。
1 原理和方法
1.1 云识别
Fmask算法中首先将整幅影像可能的云像元进行识别,其次通过水体测试进行水陆分离并分别进行云检测。然而Fmask算法中未考虑到不同类型水体信息对识别结果的影响,因此本文在此基础上利用TM/ETM+数据对算法进行了补充,对不同类型水体上的云进行了识别检测。云检测的过程包括识别厚云像元和薄云像元两步,并将含有泥沙和叶绿素的水体像元归为浑浊水像元,同时将蓝、绿、红、近红外波段的反射率简写为Rb1、Rb2、Rb3、Rb4;TM/ETM+的第5和第7波段分别称为短波红外1和短波红外2波段,其波段反射率简写为Rb5、Rb7。
1.1.1识别厚云像元
通过对不同类型水体进行大量光谱测试发现,浑浊水像元、纯水像元的Rb5<0.1,而厚云像元Rb5>0.1;浑浊水像元、纯水像元的Rb2<0.2,而厚云像元Rb2>0.2;浑浊水像元、纯水像元的Rb7<0.12,而厚云像元Rb7>0.12;浑浊水像元、纯水像元、云像元的Rb4/Rb1值存在差异,其厚云像元Rb4/Rb1>0.5。
1.1.2识别薄云像元
薄云像元具有一部分水体信息的特征,如果要精准的识别,需要区分水体的类型。通过Fmask水体测试分别将上述研究区域影像中浑浊水像元的Rb2从小到大排列,经对比发现,富含叶绿素高的水体其置信区间82.5%上分位的取值大于0.15,而富含泥沙高的水体其值小于0.15。
通过区分水体类型之后并发现,纯水像元、浑浊水像元、薄云像元的Rb7/Rb3值差异较大,薄云像元Rb7/Rb3>0.2且Rb7>0.05,而纯水或者浑浊水像元Rb7/Rb3<0.2且Rb7<0.05;同时Rb3和Rb2识别薄云像元也很关键,富含泥沙或者叶绿素的水体中,这两个波段的反射率差异明显,如果采用同一个阈值进行提取,就有可能造成薄云像元的误提,因此要分开进行薄云像元检测。即:
当水体含有较高的泥沙时,薄云像元的Rb3>0.1且Rb2>0.14,当水体含有较高的叶绿素时,薄云像元的Rb3>0.15且Rb2>0.2。
1.2 云阴影的识别
1.2.1云阴影基本检测
刘心燕[5]在利用GF-4号识别云阴影使用了红、近红外波段。根据本文的实验,短波红外2波段也能够较好的识别水体上的云阴影,即
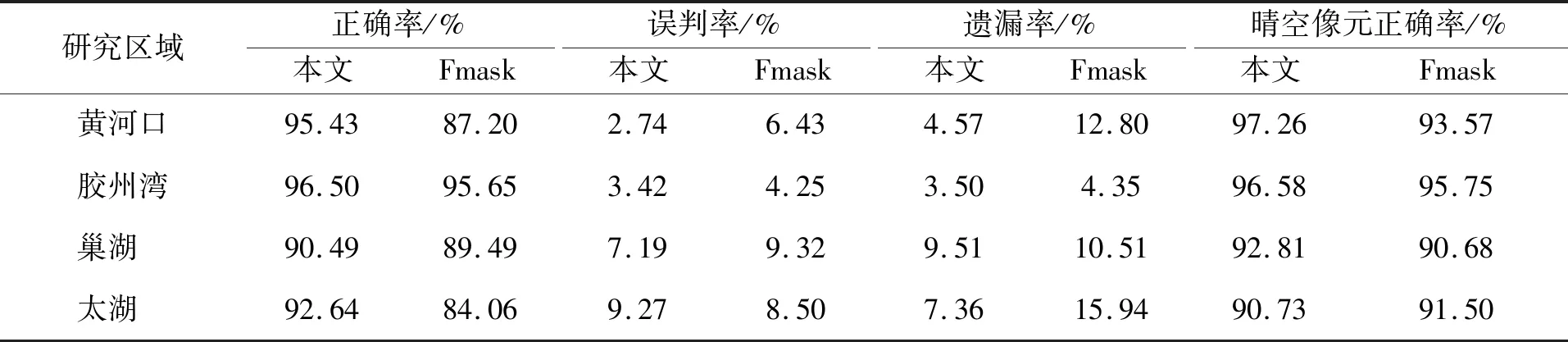
Rb3 Tb3为云阴影在红光波段处的阈值;Tb7为云阴影在短波红外2波段处的阈值;Tb4为云阴影在近红外波段处的阈值。在可见光波段中,云阴影Rb3值会明显低于富含泥沙或者叶绿素水体的;在短波红外波段,云阴影的反射率与不同类型水体的相比较低,且都处于低值;水体中富含泥沙或者叶绿素时,云阴影Rb4会明显低于水体的Rb4,将影像中的各个单波段反射率从小到大排列取置信区间12.5%下分位的值作为最终的阈值进行云阴影检测,能够提高精度。 1.2.2云阴影差异性检测 王凌[4]针对OLI影像,为了更近一步地将水体与云阴影的差异性进行扩大,提出了使用深蓝、短波红外波段构建暗像元指数NDPI,其次通过归一化植被指数NDVI构建比值阴影指数RSI来识别云阴影。本文对NDPI进行了改进,采用蓝绿光波段进行归一化处理,能够更加的扩大水体与云阴影的差异性。即: (1) (2) (3) 经分析得到,云阴影RSI的值大于不同类型水体的值。为了排除外部条件因素对影像的干扰,本文将RSI进行从小到大排列,选取每幅影像中其置信区间82.5%上分位值TS作为最终的阈值,能够更好地将一些非阴影的物体进行排除。即: RSI>TS (4) 将基本云阴影检测和差异性检测结合起来,则为最终的云阴影检测。完成云和云阴影检测流程之后,为了能更好地展示检测的结果,需要对云和云阴影的掩膜进行腐蚀膨胀操作,最终得到精确的云和云阴影掩膜。 为了后续能够更好地评价检测结果的准确性,根据资料得知黄河口、胶州湾属于富含泥沙较高的水体类型,而巢湖和太湖属于富含叶绿素较高的水体类型,分别对其水体上方的云和云阴影进行检测。 本文采用Matlab2014软件通过Fmask算法中水体测试后,充分考虑到不同类型水体光谱特征对云和云阴影识别的影响,对云识别部分进行了改进并结合提出的云阴影算法,选取了不同云类型,不同时相的不同水域类型进行分析,并采取目视解译的方式验证精度的可靠性。由于影像较大,为了能够更好地展示检测的结果,选取300×300子图像进行目视解译。为了突出本文算法的优势,对本文与Fmask3.2版本得到的云及云阴影检测结果进行了对比分析,如表1所示。在表1中,原图为432波段合成的假彩色影像,其中白色为云块,黑色为云阴影,背景为不同类型的水体。图中的圆圈为两种结果的差异之处。 表1 不同水体类型上的云及云阴影检测结果 由表1可以看出,Fmask检测结果中,厚云检测结果较好,而薄云具有穿透性,具备了不同水体的光谱特征,Fmask算法未考虑到这一点,使得薄云的检测结果较差。本文因考虑到不同类型水体的光谱特征对检测结果的影响,因此无论是厚云、薄云还是碎云,经过对比可以看出,云的检测精度得到了提高,并且云的边界清晰、结构较为完整,位于影像边界的云也能够识别出来。Fmask算法得到的云阴影检测结果,漏提和错提的现象较为普遍,而且云阴影的位置不能较精准的识别,而本文得到的云阴影检测结果与假彩色合成影像进行对比发现,云阴影位置较为准确,结构完整,并没有出现较为严重的错提现象。 为了能够验证算法的适用性,对上述的云及云阴影检测结果进行了定量分析,并对云和云阴影进行了矢量化处理,计算了云像元的正确率Rcct、云像元的误判率Rccm、云像元的遗漏率Rcom、晴空像元正确率Rcsc,以及云阴影像云的正确率Rscct、云阴影像元的误判率Rsccm、云阴影像元的遗漏率Rscom、晴空像元正确率Rscsc。计算公式如下: (5) (6) (7) (8) (9) (10) (11) (12) 式中:Rc为矢量化影像中云像元正确判别为云像元的总数;Rcs为矢量化影像中云阴影像元正确判别为云阴影像元的总数;Ec为矢量化影像中晴空像元误判为云像元的总数;Ecs为矢量化影像中晴空像元误判为云阴影像元的总数;Cs为矢量化影像中云像元漏判为晴空像元的总数;Ccs为矢量化影像中云阴影像元漏判为晴空像元的总数;Rs为检测云像元时,矢量化影像中晴空像元被正确判为晴空像元的总数;Rss为检测云阴影像元时,矢量化影像中晴空像元被正确判为晴空像元的总数;Tcloud为矢量化影像中云像元的总数;Tclear为矢量化影像中晴空像元的总数;Tshadow为矢量化影像中云阴影像元的总数。在计算云像元精度时,把云阴影像元看作为晴空像元;在计算云阴影像元精度时,把云像元看作为晴空像元。表2和表3分别为本文与Fmask对不同水体类型上方云像云和云阴影像元的定量分析结果。从表2可以看出,本文的云像元检测结果总体精度达90%以上,而Fmask云像元检测结果总体精度达84%以上。本文云像元的误判率较低,而云像元的遗漏率更低。Fmask算法中云像元遗漏率较高,主要是因为没有考虑到不同水体信息对提取结果的影响,造成了一部分薄云像元的漏提。从表3可以看出,本文的云阴影像元检测结果总体精度达88%以上,而Fmask云阴影像元检测结果总体精度却只达71%以上。本文云阴影像元的误判率和遗漏率较低,而Fmask云阴影像元的误判率和遗漏率较高,主要因为Fmask算法中云像元的提取存在很大偏差,在进行云阴影匹配时,造成了云阴影像云漏提或者错提现象更为严重。不管是云检测还是云阴影检测,本文与Fmask的晴空像元的正确率都达到了90%以上。 表2 云像元结果定量分析 表3 云阴影像元结果定量分析 随着水环境污染越来越重,时刻监测水环境的问题尤为突出。而运用遥感技术在对水环境监测方面颇为重要,但是云和云阴影的存在会阻碍遥感数据的应用,因此合理有效的识别并去除云和云阴影对水色遥感相关研究十分重要。本文根据TM/ETM+数据完成了水体上方云和云阴影检测识别,但数据单一,未来可以考虑利用多源数据完善云和云阴影识别算法。2 结果分析及讨论
2.1 云及云阴影检测结果

2.2 定量分析

3 结束语
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
航天返回与遥感(2022年2期)2022-05-12
波谱学杂志(2022年1期)2022-03-15
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
读友·少年文学(清雅版)(2019年1期)2019-05-09
小资CHIC!ELEGANCE(2018年34期)2018-11-13
扬子江(2017年1期)2017-05-04
数学大王·中高年级(2016年4期)2016-05-14
