自动化大卡车防碾压与侧翻装置
2021-04-19 00:19尧振海甘煜森
学苑创造·C版 2021年4期
尧振海 甘煜森


大卡车在转弯过程中,由于司机操控不当或行人误入盲区,易导致侧翻与碾压等安全事故。具体原因有:一,大卡车比一般车辆高大,且挂车通常很长,司机很难观察车身盲区的情况,如此时有行人误入盲区,双重因素叠加会造成侧边碾压事故;二,大卡车载重量大,碰到特殊天气如雨雪天等,地面湿滑,发生紧急情况急刹车时,若速度太快,瞬时离心力超出安全范围,容易造成侧翻。
为了解决这个问题。我们做了两个努力:一是做出一个大卡车模型,直观演示碾压区,以此警醒行人注意避让大卡车。我们仿照大卡车的车身结构,模拟出转弯内轮差区域(车辆转弯时内前轮转弯半径与内后轮转弯半径之差)。该功能模块采用的是数字舵机加拉杆转向机构,模仿卡车的前轮转向机构,以控制车辆左右转弯。我们采用一个大扭力可控圈速的串行总线编码器电机驱动后轮胎,模仿卡车的后轮驱动结构,以达到控制车辆的前进、后退、左拐弯、右拐弯的效果。
二是完成了“自动化大卡车防碾压与侧翻装置”。本装置运用探测器辅助司机及时观察盲区动态。用红黄灯光照射显示碾压区,并用语音提示行人注意安全;驾驶室内电子屏显示大卡车两侧碾压区,防止碾压事故的发生;同时利用滑动重块与稳定陀螺稳定大卡车的车身,防止侧翻。
?“自动化大卡车防碾压与侧翻装置”技术方法与应用原理
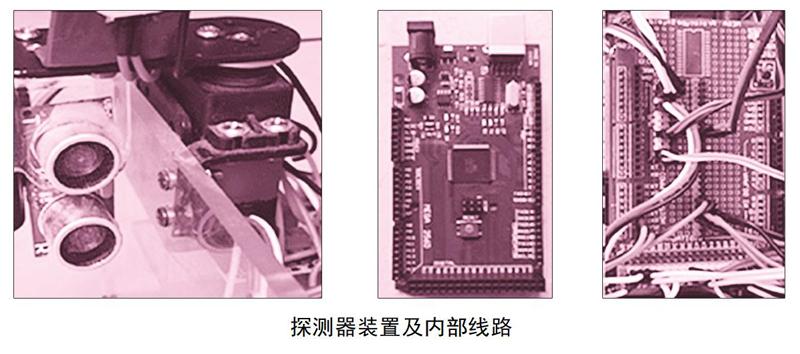
1.探测器装置。在卡车侧边合理的位置,我们安装了舵机,用来摆动可随向超声波探测雷达,链接到ATmega2560的微控制器,将可能碾压区域内探测到危险障碍物(行人或车辆)的距离值显示在数码管上,把文字提示显示在LCD屏幕上,以此来提醒司机。
2. 声音警告装置。我们采用蜂鸣器发出比周围环境尖锐得多的声音,以提醒司机注意情况,此外,我们搭建了一个语音提示模块,提醒车内司机以及车外行人注意避让。
3. 光色警告装置。黄色和红色在夜晚以及特殊环境下穿透力比较强,因此我们采用了红黄亮色灯光投射内轮差碾压区:碾压区是黄光提示,容易造成事故的危险区是红光警告。
4. 视频图像辅助观察装置。在卡车侧后方安装一个摄像头,在驾驶室安装显示屏,通过摄像头将碾压区域展示在显示屏。
5. 防側翻装置。此装置采用滑动配重平台以及超高速惯性动量飞轮,在卡车的车厢下方中部,安装一个可左右滑动的配重块,在卡车左转或者右转弯时,滑动到相应一侧以抵消大卡车转弯时产生的离心力。同时,在滑动块上安装一对超高速转动的正反转飞轮,按角动量守恒定律,飞轮高速转动时,角动量很大,旋转轴会提供一个极大的稳定力,从而维持车身的稳定。
?性能测试与改进
第一代大卡车模型,采用了STM32控制板平台+PS2遥控,可实现行走模拟。
第二代大卡车模型,采用Arduino mega2560主控板+ Arduino IDE语言编写程序代码,改进行走,实现超声波探测与“滴滴”声音提示。
第三代大卡车模型,更换了行走模块,提高操控性。更换声音,增加文字、图像装置,优化了Arduino程序代码。进一步改进行走、超声波探测以及中文语音提示等。
(本作品荣获第35届广西青少年科技创新大赛中学生科技创新成果竞赛一等奖 指导老师:杨立农)
猜你喜欢
金山(2022年2期)2022-03-15
北京青年周刊(2020年33期)2020-08-28
大众医学(2020年5期)2020-06-19
汽车实用技术(2020年3期)2020-03-07
文萃报·周二版(2019年8期)2019-09-10
小雪花·初中高分作文(2019年2期)2019-06-27
环球时报(2019-06-14)2019-06-14
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
为了孩子(3~7岁)(2016年5期)2016-05-14