增程式乘用车动力选型与控制策略建模
2021-04-19 12:39李基凤许雨涛
小型内燃机与车辆技术 2021年1期
李基凤 张 毅 许雨涛
(1-宁波吉利罗佑发动机零部件有限公司 浙江 宁波 315336 2-浙江吉利动力总成有限公司)
引言
随着油耗法规的加严及乘用车双积分政策的施行[1],增程式车辆作为一种节能型车辆,越来越受到乘用车行业的重视,因此研究增程式车辆的动力总成选型,包含电池、电机与发动机选型更有意义。研究增程式车辆在新型油耗测试循环,即WLTC(世界轻型车试验循环)下,不同阶段的油耗表现,对于研究增程式车辆的节油机理与适用市场具有指导作用。
1 动力总成选型
根据车辆性能指标,即最高车速、最大爬坡度、0~100 km/h 加速时间及续驶里程等确定电机、电池及发动机主要性能参数。
本文基于一款增程式车辆性能指标,对电机、电池及发动机进行动力匹配选型,确定最终选用的电机、电池及发动机。
1.1 动力电池参数匹配
动力电池的参数匹配考虑能量匹配、功率匹配及容量匹配3 方面。
1)电池能量EB,需要满足纯电续驶里程。
式中:m 为车质量,kg;f 为轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;v 为车速,km/h;DOD 为放电深度,%;ηt为传动效率,%;ηm为电机效率,%;ηb为电池效率,%;ηa为附件能量消耗比例系数;Sev为纯电续驶里程,km。
2)电池功率PBat_max,需要满足驱动电机最大需求功率。

式中:Pmax为车辆驱动功率需求,kW;ηm为电机效率,%;PA为附件功率,kW。
3)电池容量,需要同时考虑能量和功率需求。

式中:EB为电池能量,kJ;UE为直流母线电压,V;PBat_max为电池峰值功率,kW;k 为蓄电池最大放电倍率。
1.2 驱动电机参数匹配
驱动电机直接驱动车辆,与车辆的性能直接相关,根据车辆的动力性参数(最高车速、爬坡度及加速性能等)确定驱动电机的峰值功率、额定功率、最高转速、额定转速、峰值转矩和额定转矩。
1)驱动电机功率,驱动电机的峰值功率应满足车辆动力性的需求。
最高车速需求功率:

式中:m 为车质量,kg;f 为轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;vmax为最高车速,km/h;η 为电机效率,%。
最大爬坡度需求功率(某一车速下):

式中:m 为车质量,kg;f 为最大爬坡度需求功率(某一车速下):轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;v 为车速,km/h;η 为电机效率,%;αmax为最大爬坡度。
加速需求功率:

式中:m 为车质量,kg;f 为轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;vb为加速到车速,km/h;η为电机效率,%;t 为加速时间,s;dt为迭代步长。
驱动电机峰值功率:

驱动电机额定功率:

式中:λ 为过载系数,取2~4。
2)驱动电机转速匹配。
车辆最高车速取决于驱动电机转速与主减速比,故可通过最高车速与主减速比确定电机最高转速:

式中:r 为轮胎滚动半径,m;β 为扩大恒功率系数,一般取2~4;nb为驱动电机额定转速,r/min。
3)驱动电机转矩匹配。
驱动电机的峰值转矩应满足车辆起步转矩和最大爬坡度的需求:
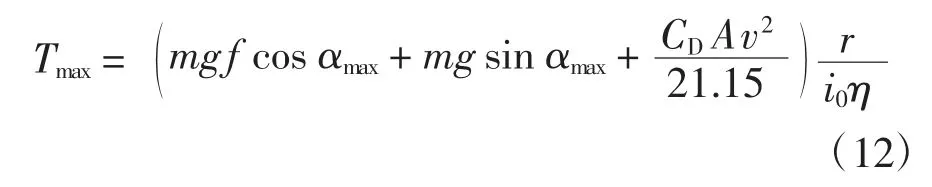
式中:m 为车质量,kg;f为轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;v 为车速,km/h;η 为电机效率,%;r 为轮胎滚动半径,m;αmax为最大爬坡度。
驱动电机转矩需要根据加速性能要求进一步校核。
1.3 发电机参数匹配
发电机连接在发动机输出端,将机械能转化为电能,发电机的转速取决于发动机转速与速比,发电机功率取决于发动机功率。此外,还需要考虑发电机起动发动机的需求功率。
1.4 发动机参数匹配
发动机的输出功率需要满足巡航工况、循环工况及极限加速工况。在巡航工况行驶并长时间爬坡时,电池处于电量维持状态,发动机提供驱动功率。在循环工况行驶时,为保证车辆在整个循环功率下,发动机具有维持电池电量平衡的能力,发动机输出功率应大于循环功率的平均功率。在极限加速工况下,由发动机提供功率需求。
巡航功率需求:

爬坡功率需求:

式中:m为车质量,kg;f为轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;v 为车速,km/h;ηt为传动效率,%;vi为爬坡车速,km/h;i 为爬坡度,%。
循环工况功率需求:

式中:Pwh(t)为轮端功率需求,kW;Tcyc为循环时间,s;ηt为传动效率,%。
极限加速功率需求:

式中:m 为车质量,kg;f 为轮胎滚阻系数;CD为风阻系数;A 为迎风面积,m2;v 为车速,km/h;vm为加速终点车速,km/h;ηt为传动效率,%;tm为加速时间,s。
发动机功率:

2 车辆模型与控制策略建立
本文基于AVL Cruise 与Matlab/Simulink 分别建立了车辆模型与控制策略,通过联合仿真实现了增程式车辆性能仿真计算。
2.1 车辆模型
车辆模型包含发动机、驱动电机、发电机、电池、轮胎及车辆参数等,详细输入参数如表1 所示。
图1 是增程式车辆模型,在AVL Cruise 中完成车辆模型搭建。
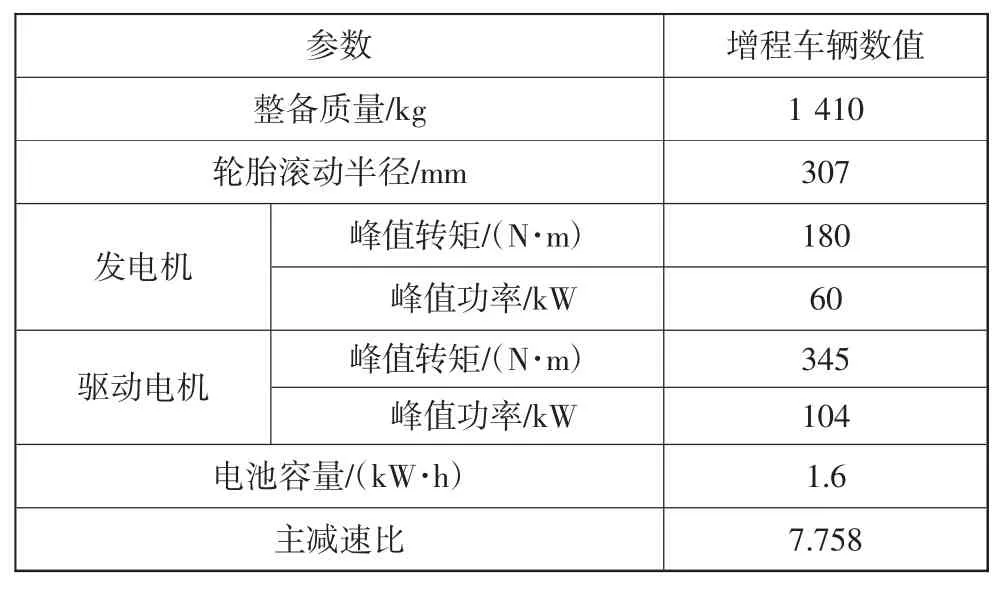
表1 输入参数
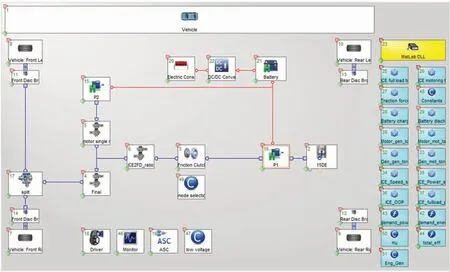
图1 增程式车辆模型
2.2 控制策略
根据车速、电池SOC、加速踏板及制动踏板等参数将车辆运行模式划分为纯电模式、增程模式、制动回收、机械制动、停机及停机充电[2-3]。图2 是控制策略中模式划分流程图,图3 是在stateflow 中实现的模式划分。

图2 控制策略流程图
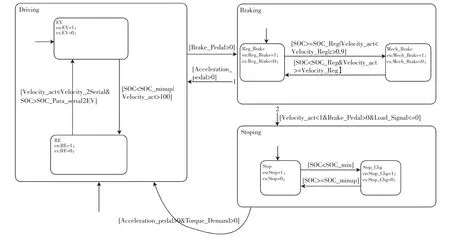
图3 模式划分实现(Stateflow)
驱动模式含纯电模式和增程模式[4],在电池SOC较高,车速较低,电池能量可以满足需求功率的条件下,进入纯电模式;电池SOC 较低或车速较高,电池能量不满足需求功率的条件下,进入增程式驱动模式。
制动模式划分为机械制动和制动回收模式。制动时优先进入制动回收模式,回收制动能量储存在电池中,用于驱动。在车速低于10 km/h、电池SOC 较高的情况下或紧急制动时采用机械制动。
车辆停机状态时,若电池SOC 较低,会进入停机充电模式,发动机和发电机运行,给电池充电至SOC限值,保证在车辆启动时电池SOC 处于合理的运行区间。
3 仿真结果分析
3.1 运行工况点
增程式车辆的发动机不直接参与驱动,故发动机可以运行在指定工况点。图4 是增程式与传统车辆运行工况点对比,增程式车辆发动机运行工况点主要集中在低油耗区域。
3.2 WLTC 循环仿真结果分析
以国六中采用的WLTC 循环(含低速、中速、高速及超高速)为例,表2 是WLTC 循环参数,表3 是WLTC 循环仿真结果。增程式较传统车循环油耗下降约21%,油耗下降主要出现在低、中速区域。原因是低、中速时传统车发动机运行负荷较低,处于高油耗区域,增程式车提高了发动机运行负荷,使发动机运行在低油耗区域。传统车与增程式车超高速段油耗差异不大,原因在于高速时传统车发动机运行在较高负荷,与采用增程式车的油耗差异不大。
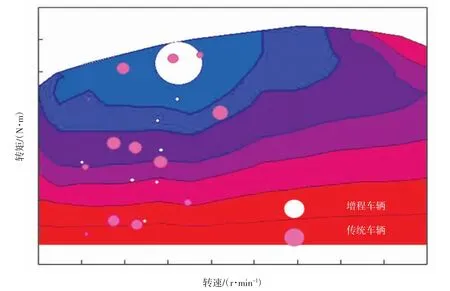
图4 增程式与传统车辆运行工况点对比

表2 WLTC 循环
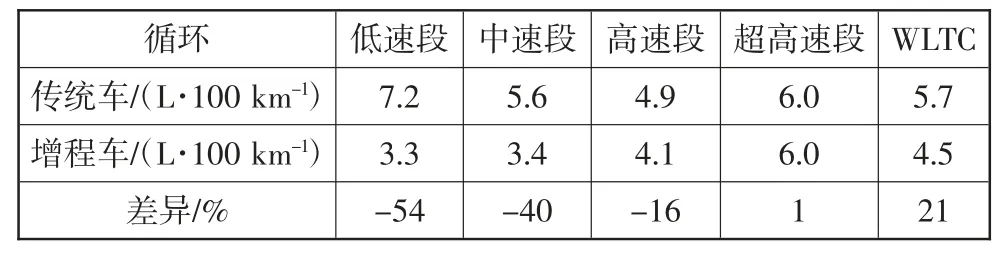
表3 WLTC 循环仿真结果
图5 是发动机、发电机及驱动电机的运行工况。驱动电机直接驱动车辆,其转速随车速变化,转矩与轮端需求转矩成速比关系。发动机和发电机在SOC较低或车速较高的情况下运行。
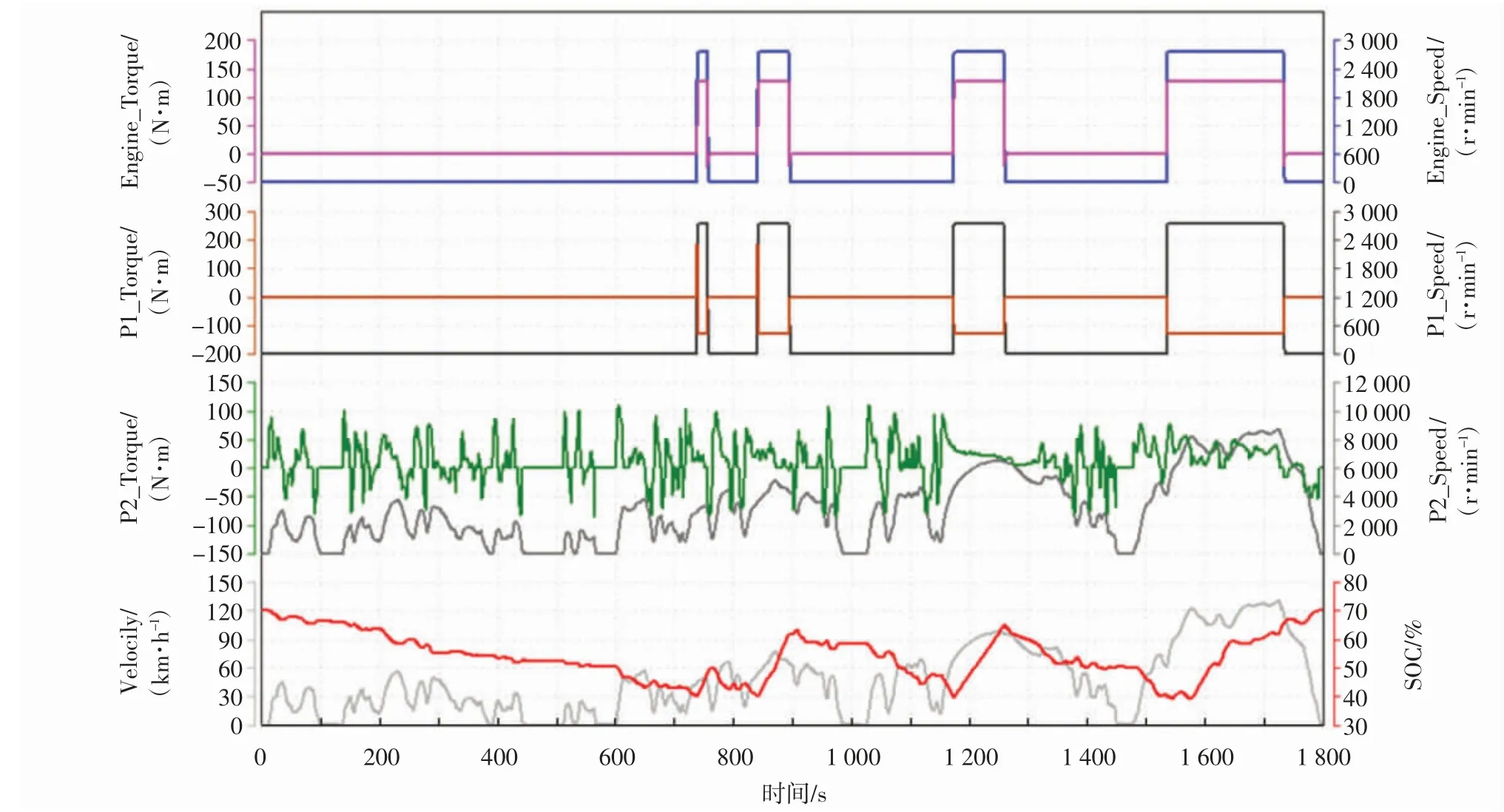
图5 发动机和电机运行工况
图6、图7 是增程车和传统车的能量分布,系统能量损失主要是发动机损失,采用增程后,系统效率提升6%左右。

图6 能量分布(增程车)
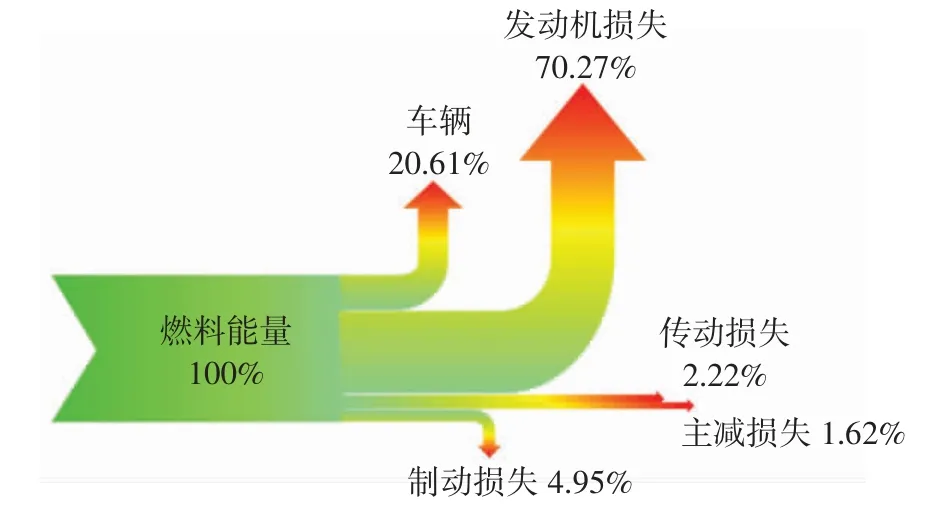
图7 能量分布(传统车)
4 结论
本文基于某款增程式车辆的动力性能指标对电机、电池及发动机主要参数进行匹配选型,用AVL Cruise 搭建车辆模型,Simulink 建立控制策略模型,通过联合仿真实现增程式车辆性能仿真计算,结论如下:
1)在WLTC 循环,增程式车辆循环油耗较传统车下降21%左右,主要原因是增程式车辆发动机不直接参与驱动,可以调整发动机运行工况,使其主要运行在低油耗区域。
2)WLTC 前3 个阶段采用增程式节油效果较明显,主要是前3 个阶段的平均车速较低,传统车发动机运行负荷较低,采用增程后提升发动机负荷,运行在低油耗区域。
3)通过车辆能量分布可知,车辆系统损失主要存在于发动机损失,对比传统车与增程车的能量分布,采用增程后,发动机损失降低约11%,系统效率提升约6%。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年11期)2021-12-21
舰船科学技术(2021年12期)2021-03-29
客车技术与研究(2019年2期)2019-11-26
汽车杂志(2018年6期)2018-06-25
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
中学生数理化·八年级物理人教版(2016年5期)2016-08-26