
一种基于图像识别的验潮仪检定装置
2021-04-19 06:40:20晏天李帆
宇航计测技术 2021年6期
晏 天 李 帆
(国家海洋局南海标准计量中心,广州510300)
1 引言
海洋潮位是海洋观测、调查和监测的重要参数之一,通过观测海洋波浪、潮位的变化可以实时了解海洋的变化,提高海洋预报的精度,有效预防和应对全球日益严重的飓风、风暴潮等海洋灾害。实际工作中,根据应用场景和使用条件的不同,采用多种原理的潮位测量仪器(以下简称验潮仪)可以较为准确的测量到海洋的潮位数据,验潮仪的实验室检定和校准设备为验潮仪检定装置,该装置包含一整套水塔系统、给排水系统、控制系统、测量系统等,可模拟海洋潮位的变化,对验潮仪的计量特性进行综合评价,将验潮仪的量值有效溯源至国家基标准。
在工业生产和计量测试领域,常用闭环的方法控制温度、压力、流量等连续变化量,验潮仪检定装置是一种典型的流量控制系统,过去很长一段时间,国内验潮仪检定装置受技术水平所限,自动化程度较低,控制流程较为繁琐、单一。经过多年的发展,验潮仪检定装置从半自动,单一控制方式转向为多种控制方法兼存,高自动化集成闭环控制为主的实现方法。研究人员设计了基于数字图像和激光测距的验潮仪检定系统,较好地解决了海洋潮位的高精度、自动化测量技术,较好地解决了闭环控制下的图像处理、伺服电机和水泵阀门等部分协调工作的技术难点,能较好地应用于验潮仪的检定和校准。但这些方法中,图像识别模块还须利用标识物来辅助进行判别,控制方式还较为单一。
本装置的搭建目标是建立关于验潮仪检定装置水位与图像识别的内在关联,在闭环控制下实现潮汐水位变化图像识别,精确检测到透明管水基线与铟钢尺刻线读值,并可以模拟仿真半日潮和全日潮变化规律,具备手动、自动和手机APP 远程控制功能。最后,对所建计量标准装置的计量特性进行相应的分析和评价。
2 验潮仪检定装置设计需求分析
验潮仪检定装置主要用于浮子式验潮仪、声学验潮仪和压力验潮仪的检定和校准,根据三种类型验潮仪的检定规程对装置的要求,提出一种验潮仪检定装置设计需求。
水塔系统:水塔的内径不小于1m,水塔测量范围最大值不低于10m;最大静态允许误差±1mm;动态响应时间小于1s;同时具备手动和自动控制两种控制模式,具备相应的安全防护结构和仪器吊装设备;铟钢尺的测量范围不小于10m;铟钢尺在常年受49N 拉力下示值误差稳定性不大于0.1mm;标尺间隔(最小刻度值)1mm;水位识别的分辨率应优于1mm,能自动识别和记录水位值。
给排水系统:水位有效高度变化范围(0~10)m;水位变化速率(0~300)mm/min;可调节设定待检水位水面稳定时间,并不大于2min;水泵扬程不小于15m;水位静置48h 不漏水;能模拟半日潮和全日潮;实现水位从低到高和从高到低的正反行程控制;经人工调节后水位控制点的误差不大于±20mm;能自动规划水位检定点,自动调节到达每个检定点附近,其误差应优于±50mm。
随动伺服系统:工业相机测量及转换失真度优于±0.01mm;伺服电机采用绝对值编码器,与标准高精度水位计的测量分辨率、逻辑编程同步响应,响应时间不大于0.01ms。
中心控制系统:中心控制采用闭环控制模式;能够实现无线远程控制;能实现水位数据抓取和处理,并出具相应的证书报告。故障自检系统能在闭环控制模式基础上,执行逻辑编程,通过故障代码的形式,显示在操作界面。
3 验潮仪检定装置的设计
通过以上设计需求,设计一种基于图像识别的验潮仪检定装置,其设计图如图1所示。该检定装置通过给排水系统对水塔系统供水,水塔系统下部联通管与透明管连接。通过随动伺服系统随动平台上的CCD 相机对透明管水基线水位变化连续拍照。将拍摄图像信息同步传输到4G 数据釆集器,经PLC 连接到终端工控机。同时电动调节阀在终端工控机的指令下,对4mA~20mA 模拟信号精度调节过流截面流量,实现精确水位变化与随动平台移动同步联控,且可高度模拟半日潮和全日潮。

图1 验潮仪检定装置的结构Fig.1 Structure of tide gauge verification device
水塔系统包括水塔和其附属件。其中水塔内径1m,水塔水位最大高度为10m,材料为304 不锈钢,水塔上固定有铟钢尺,铟钢尺的测量范围不小于10m。透明管与铟钢尺平行固定于水塔上,与CCD 相机距离一致,通过连通器与水塔水位保持一致。水塔上固定连接的温度传感器和光电浮子水位计用于监测整套装置中水塔的水温和水位。
给排水系统包括给水系统与排水系统,管路为串并联组合,当截止阀单向开启至电动球阀M,通过离心液体泵、电动调节阀E、流量计L 至二位三通换向阀M至水塔,其他调节设备关闭时,可实现由蓄水池给水塔供水。当开启二位三通换向阀M至电动球阀M至离心液体泵、电动调节阀E、流量计L 至电动球阀M至截止阀,其他调节设备关闭时,可实现由水塔给蓄水池排水。管路中压力传感器与水塔的压头变化同步,管路中截止球阀是检修时用于放气,平时处于关闭状态。
随动伺服系统包含了CCD 相机以及相应驱动系统,铝合金桁架固定于墙面和地面上,桁架上铺设精密不锈钢轨道,轨道上搭建有随动平台,平台上架设有CCD 相机,通过伺服驱动机构控制。
中心控制系统由4G 数据采集器、工控机、伺服系统和PLC 构成。
该验潮仪检定装置是基于图像识别的闭环控制方式和原理,其控制原理在于:
(1)在闭环控制状态下,流量计的变化与电动调节阀的信号同步共享联调。
(2)电动球阀、二位三通换向阀、电动调节阀均采用4mA~20mA 模拟量控制方式,实现水塔系统水位变化的精度控制。
(3)随动伺服平台移动系统中的伺服驱动控制系统与流量计信息共享,实现水位变化随动同步。
(4)CCD 相机跟踪连续拍摄水位变化,且将拍摄信息同步传输到4G 数据釆集器。
(5)管路设备给排水系统和随动伺服平台移动系统信息共享,通过高精度流量计输出的流量与水塔系统的软件处理,反馈到后台PC 终端控制器高度模拟仿真,实现半日潮和全日潮的潮汐变化规律。
(6)4G 数据釆集器存储的信息一路经PLC 传输到终端,另一路发送云平台,经由手机蓝牙系统处理,通过手机APP 实现验潮仪检定装置远程控制。
其软件运行图如图2所示。
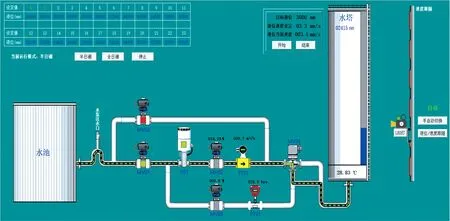
图2 验潮仪检定装置软件运行图Fig.2 Software operation diagram of tide gauge verification device
4 验潮仪检定装置计量特性评价
基于图像识别的验潮仪检定装置计量特性评价主要是对其计量标准引入的不确定度进行分析,以此做为该基于图像识别的验潮仪检定装置是否能做为开展各种类型验潮仪检定和校准的重要依据。
该计量标准装置计量标准器和配套设备不确定度来源包括CCD 相机引入的标准不确定度分量u
、铟钢尺因环境温度变化引入的标准不确定度分量u
、铟钢尺稳定性引入的标准不确定度分量u
、CCD 相机自动读数引入的标准不确定度分量u
、CCD 相机水平面与透明管水位线不处于同一水平面引入的标准不确定度分量u
。4.1 CCD 相机引入的标准不确定度分量u1
4.2 铟钢尺因环境温度变化引入的标准不确定度分量u2
铟钢尺由铟瓦材料制造,温度变化会引起长度发生变化从而引入不确定度。根据JJG 741 的描述要求,铟钢尺的温度系数α
不大于±0.5 ×10℃,使用环境温度为(5~35)℃,则环境引起的长度变化最大值公式为:
t
——环境温度;L
——铟钢尺长度。最终铟钢尺变化量ΔL
值为7.5 ×10mm,引入的标准不确定度分量u
可忽略不计。4.3 铟钢尺稳定性引入的标准不确定度分量u3
4.4 CCD 相机自动读数引入的标准不确定度分量u4
4.5 CCD 相机水平面与透明管水位线不处于同一水平面引入的标准不确定度分量u5



4.6 验潮仪检定装置计量标准的扩展不确定度U95
由上述各引入的不确定度分量合成该计量标准装置的合成标准不确定度u
=0.139mm。则该基于图像识别的验潮仪检定装置计量标准的扩展不确定度为U
=0.28mm。5 结束语
本文设计了一种基于图像识别的验潮仪检定装置,该装置在闭环条件下进行控制,实现潮汐水位变化图像识别,精确检测到透明管水基线与铟钢尺刻线读值,并可以模拟仿真半日潮和全日潮变化规律,具备手动、自动和手机APP 远程控制多种控制方式。具备图像识别效率高,控制方式先进的特点。
通过对该装置计量标准的不确定度进行分析,其扩展不确定度为U
=0.28mm。根据《JJF 1094测量仪器特性评定》对计量标准装置测量结果评价的规定和要求(检定和校准结果的扩展不确定度U
/
验潮仪MPEV 是否小于1/3),以及被检各种类型验潮仪计量特性指标的实际情况,利用该检定装置开展验潮仪的检定和校准过程中,由计量标准器和配套设备引入的测量不确定度分量较小。因此,该装置能较好满足浮子式验潮仪、声学验潮仪和压力验潮仪的检定和校准需求,具有较高的实用价值。猜你喜欢
文萃报·周二版(2023年23期)2023-06-15 18:43:15
小哥白尼(趣味科学)(2022年7期)2022-09-20 06:07:46
房地产导刊(2022年4期)2022-04-19 09:04:06
小学科学(2022年2期)2022-03-04 09:21:30
小学科学·教师版(2022年2期)2022-03-03 17:24:21
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
中国水利(2017年17期)2017-11-04 06:23:53
