
浅析八都水库水下机器人应用
2021-04-17 11:52楼仁有陈明恩
浙江水利科技 2021年2期
楼仁有,陈明恩
(1.义乌市水务建设集团有限公司,浙江 义乌 322001;2.杭州定川信息技术有限公司,浙江 杭州 310020)
1 问题的提出
八都水库位于义乌市钱塘江流域浦阳江支流大陈江上游的八都溪上,坝址坐落在义乌市大陈镇上坑仁村,水库集雨面积35.1 km2,主流长度11 km,总库容3 658万m3,最大坝高57.80 m,是一座集供水、灌溉、防洪、发电等综合利用的中型水利枢纽工程。工程主要由拦河大坝、溢洪道、泄洪放空发电输水隧洞、电站及输水建筑物等组成,配套工程有电站、输水隧洞、调节池、东塘——八都水库引水隧洞等。
《浙江省水利发展“十三五”规划》“水利行业能力建设信息化”专栏中提出:主动适应“互联网+”和大数据发展趋势,大力推进智慧水利[1]建设,以水利信息化带动水利现代化发展。八都水库除险加固工程信息化建设正是响应信息化发展需求。其中,大坝安全监测系统为水库信息化建设的主要内容,大坝(主坝)表面变形、坝体内部沉降、渗流量等传统监测项目不能满足对库区进水口闸门、水下坝体等建筑物可视化观测的要求。本文介绍一种能解决上述库区水下可视化[2]观测难题的智能设备水下机器人[3],使库区深水建筑物不再是观测死角。
2 观测需求
八都水库工程于1995年2月27日正式动工,1997年底下闸蓄水,1998年6月全部完工,2002年通过竣工验收。从开始蓄水至今已有23 a,由于当时技术限制,存在设计标准偏低、施工质量不高、设施年久失修等问题,除险加固工程和信息化建设无法实现水下坝体等重要建筑物的观测检查。
主坝为混凝土面板堆石坝,坝顶高程156.10 m,最大坝高57.80 m,坝顶宽5.00 m,坝顶长324.00 m,坝顶上游设“L”型防浪墙,墙底高程151.60 m。大坝上游采用钢筋混凝土面板防渗,坡比1:1.3,面板厚30 cm,每12.00 m设垂直缝1条。下游坡设3级坝坡,分别在高程118.10 m和138.10 m处设2级马道,下游坡坡比均为1:1.3。水面以下大坝混凝土防渗面板表面情况如表面沉降缝、拼接缝、止水橡皮、修补沥青、裸露钢筋等,无法通过传统方法观测检查。
溢洪道紧靠主坝的左坝头,为侧槽式开敞溢洪道。溢洪道顶高程152.10 m,进水宽40.00 m,侧槽首部底槽宽2.00 m,末端宽12.00 m,侧槽底高程145.08~144.71 m,纵坡i=0.01,经10.00 m平底段,下接陡槽段,泄水陡槽底宽12.00 m,水平投影100.00 m,纵坡i=0.33,陡槽末端为反弧段及调流鼻坎。上游侧水面以下泄水闸门表面情况和闸底平整贴合情况无法通过传统方法观测检查,包括闸门表面腐蚀、两侧面贴合、底部异物等情况。
输水隧洞位于大坝左岸100.00 m的山体内,由原导流隧洞改建而成。隧洞进水口为龙抬头形式,进口底高程108.10 m,进水口段长18.50 m,由喇叭口、闸门井和渐变段组成,喇叭口断面由宽3.32 m、高2.66 m渐缩至2.00 m×2.00 m,闸门分别布置QPK-40/40-8/9快速闸门启闭机和1台QPQ-5型卷扬式启闭机。渐变段长5.00 m,断面由方形渐变至直径2.00 m的圆形,以1:2.0斜洞于原导流洞0+065.00 m处相连,龙抬头段长48.00 m。隧洞出口段设压坡段,装2.00 m×2.00 m弧形工作闸门,配WL-32/25型螺杆式启闭机控制。在导流洞桩号0+291.24 m左侧设发电输水支洞,长298.43 m。涵洞及拦污栅运行情况,包括涵洞表面、底部淤积、栅表面腐蚀等,无法通过传统方法观测检查。
3 设备结构与功能
根据八都水库实际工程情况,本项目选择查湃HX-100-I型水下机器人。此系列机器人由主框架、浮力块、垂直推进器、水平推进器、云台摄像头、水下灯、电池舱、电子舱、气孔、压载块等组成,具有便携易操作,功率大抗流强,模块化设计可扩展性强,兼顾手动和自动控制等多种模式高效作业,采取电池供电的形式,享有高效可循环的运行时间。设备结构见图1。
查湃HX-100-I型水下机器人尺寸为507 mm×379 mm×280 mm;作业水深标配为 100 m;电缆标配2根,100 m 8芯缆线1根,500 m 8芯缆线1根,照明配2只1 500 lm高亮度水下LED 灯;摄像采用SONY 1 080 P 超低延时低照度水下高清摄像头;遥控云台为上下 50º,远程控制;垂直采用2个700 W 推进器,水平采用4个700 W推进器,矢量分布;航速(抗水流速)为4 节,即2 m/s;自动功能有自动定深、自动定向;电池采用5 000 C定制大容量锂电池模组与平衡充电器;激光测距仪[4]为水下耐压≤300 m,平行光束对齐为(75±5)mm;机械臂采用水下单功能大抓力机械手。
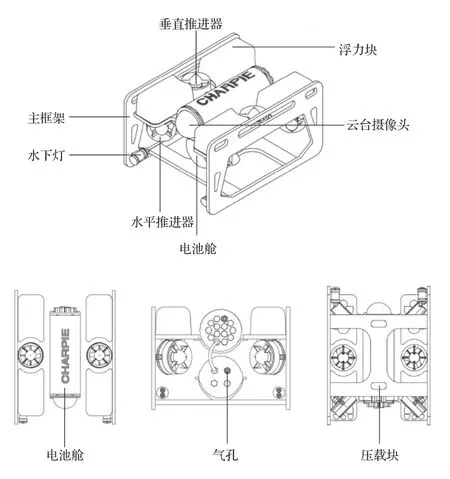
图1 水下机器人设备结构图
结构检测功能是使用水下机器人对大坝、水库、管道等环境进行检测,通过水下机器人回传的摄像头视频数据和声呐成像数据对检测物的缺陷情况进行判断。水下定位导航功能由声波发射端和接收端2部分组成,水下机器人将搭载声波发射端,通过测量预设的4个接收端之间的相位差或时延估算目标方位,并通过机器人搭载的深度传感器对深度进行判断,配合地图可在画面中显示当前实时位置。
4 水下检查应用
八都水库水下机器人的应用主要是利用设备的结构检测功能,分别对库区坝体、泄洪闸、拦污栅、隧洞等建筑物进行水下可视化观测。
4.1 坝体水下垂直缝检查
大坝上游采用钢筋混凝土面板防渗,面板厚30 cm,每12.00 m设垂直缝1条,最大坝高57.80 m,坝顶长324.00 m,面板面积大,垂直缝数量多且长度较长。了解大坝前期运行过程中发现的问题,结合工程施工技术和质量,采取预定水下检查方案,将面板分区分块和垂直缝分条带[5],预先判定部位反复仔细排查。在对坝体水下垂直缝实际检测的过程中,利用设备本身的特点,1 080 P 超低延时低照度水下高清摄像头在八都水库的水质中视频观测较为清晰。垂直方向2 个700 W 推进器与水平方向4个700 W推进器,使得巡游速度较快,坝体水下检查效率大大提高。八都水库坝体垂直缝水下缝隙大小情况见图3。图3中右上角缝宽明显大于下方缝宽,判定此处垂直缝异常。而且在此垂直缝深度附近发现多处坝体混凝土面板表面不平整,出现多处表层混凝土脱落的情况。

图3 坝体水下观测图
利用高清摄像头从图像画面发现缝隙宽度异常时,即可用激光标尺对缝隙宽度进行宽度值比测。首先对激光标尺进行水下刻度尺测试,出厂激光标尺间距7.5 cm;再用激光标尺对实际缝隙进行比测,右侧激光上方缝隙目测估算占比为激光标尺宽度的1/4(见图4),则缝隙宽度估算值为1.9 cm,为安全监测提供水下数据支撑。

图4 激光标尺缝隙比测图
4.2 泄洪闸水下表面检查
八都水库泄洪闸为钢结构闸门,闸门结构长期受周边环境和运行荷载的影响,容易发生防腐涂层脱落、钢板锈蚀、磨损、变形等破损情况[6]。在实际检查过程中,采用闸门钢板分区分块,利用水下机器人快速巡游、高清摄像等特点,较好完成了八都水库泄洪闸水下闸板表面观测任务。钢闸板表面涂层粉化、脱落情况见图5,右上角白色部分为粉化现象以及部分脱落锈蚀。
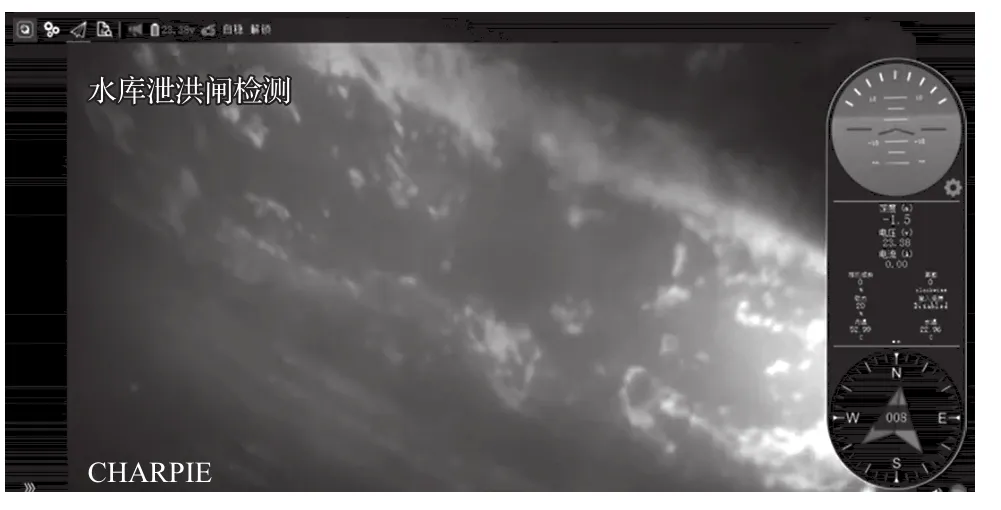
图5 泄洪闸水下观测图
4.3 拦污栅水下表面检查
八都水库拦污栅设置在隧洞进口,用于拦阻水流夹杂的木块、杂草等较大形状的异物,保证水轮发电机安全运行。输水隧洞拦污栅由栅条、横隔板、边框组成,浇筑于混凝土墩墙上,材质为钢制[7]。钢制设施同上述泄洪闸,容易发生防腐涂层脱落、钢板锈蚀、磨损、变形等破损情况。在实际检查过程中,采取将拦污栅分区分块,利用水下机器人快速巡游、高清摄像等特点,较好完成八都水库拦污栅水下结构表面观测任务。拦污栅表面情况良好,未发现粉化现象和脱落锈蚀情况(见图6),图6中左侧发现有一根树枝被拦污栅阻拦在输水隧洞外侧。

图6 拦污栅水下观测图
4.4 输水隧洞水下检查
八都水库输水隧洞作为地下结构,因输水会产生内水或外水压力,有可能还会因应力重引起围岩变形。对于输水隧洞传统的排空或潜水员入水检查方法,在工程应用的广度和深度上受到极大制约[8]。在实际检查过程中,将输水隧洞分区段,利用水下机器人快速巡游、高清摄像等特点,较好完成八都水库输水隧洞底部观测任务。输水隧洞表面情况良好,未发现伸缩缝和洞壁异常情况(见图7);图7中间上部发现有一垃圾袋,且有一定的淤积情况,用水下机器人的单功能大抓力机械手进行抓取清除垃圾袋。
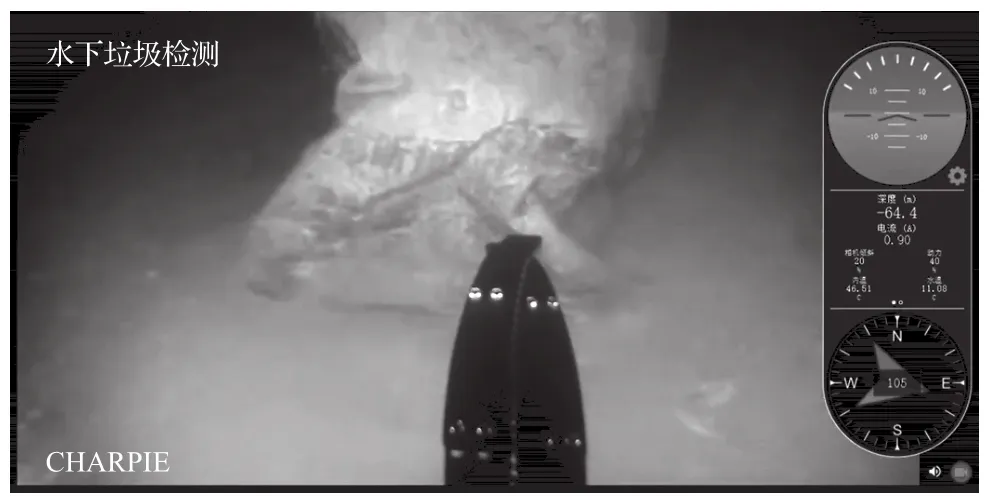
图7 输水隧洞水下观测图
图8为输水隧洞底部有一方形异物,通过激光标尺比测,估算异物宽度约为激光标尺宽度的1.7倍,则异物宽度估算值为12.8 cm,为后期异物清除维护提供尺寸数据。

图8 激光标尺异物比测图
5 出现问题与解决方法
八都水库水下机器人在对库区坝体、泄洪闸、拦污栅、隧洞等建筑物进行水下可视化观测应用中,出现几个问题,在设备技术人员远程指导下解决。现梳理问题和解决方法,以便后期参考。
①当启动机器较长时间后,电脑仍显示等待连接中。解决方法:机器脐带缆是否已经连接;电脑本地IP地址是否设置正确;水面端侧面的指示灯是否正常显示,红灯常亮、黄灯快闪、绿灯快闪。②机器通电后电机不受控制运转。解决方法:检查机器是否处于“定深”或“自稳”模式中,如果是则切换至手动模式;检查手柄是否校准;如果已尝试上述方法仍未解决问题,可能为机器故障,立即锁上机器,断开电源,关闭软件,并联系设备厂家技术支持人员。③尝试在水中走直线时,一直在转弯或不受控。解决方法:检查前后运动时所有电机是否全部运行,如有单个电机不工作,检查推进器内是否缠绕杂物(如水草等),断电移除后再进行测试;检查向前运动时各个电机转动方向是否正确,如发现某电机运转方向错误,联系设备厂家技术支持人员并在其指导下调整电机设置。④操作界面上深度读数异常。解决方法:在空气中对深度传感器进行重新校准。⑤操作界面上只有视频画面,无参数界面。解决方法:鼠标双击视频画面调出参数界面。⑥出现电流过大现象。解决方法:逐一排查是否存在流速过大、电机缠垃圾、电缆被勾住等情况。⑦图像间断或有雪花。解决方法:通常为电缆缠绕影响通讯,尝试理顺电缆。
6 结 语
水下机器人为探查水下情况多了一双“眼睛”,在水下结构物安全性诊断中发挥不可或缺的作用。基于水下机器人和传感器的水下物联网,正成为水库安全应用的科技热点。计算机技术、视频技术、传感技术的发展,使硬件及软件的综合智能化程度提升成为可能,技术应用于水下机器人,有利于提高水库库区水下可视化观测适应能力,进而全面提升整个水库运行的可靠性及智能化水平。借助水下机器人提高水库整体管理水平,有效降低水下检测风险,具有进一步推广的价值,是未来水库库区水下可视化检测的发展方向。
猜你喜欢
小水电(2022年5期)2022-10-17
水利水电工程设计(2021年4期)2022-01-05
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年12期)2021-07-22
水泵技术(2021年2期)2021-01-24
黑龙江水利科技(2020年8期)2021-01-21
黑龙江水利科技(2020年8期)2021-01-21
四川水力发电(2020年2期)2020-05-23
——减少水电站拦污栅水头损失探讨
湖南水利水电(2017年6期)2018-01-04
中国工程咨询(2017年9期)2017-01-31
