
河道黑臭水体原位修复无人船设计*
2021-04-15 08:32戴有华吴丹金文忻孙昌权
中国农机化学报 2021年6期
戴有华,吴丹,金文忻,孙昌权
(江苏农林职业技术学院,江苏句容,212400)
0 引言
河道水体黑臭影响城市景观、破坏生态环境、影响居民生活、危害人体健康,已经成为当前亟待解决的水环境问题[1]。2015年国务院颁布的《水污染防治行动计划》提出:到2020年,地级及以上城市建成区黑臭水体均控制在10%以内;到2030年,全国城市建成区黑臭水体总体得到消除[2]。为实现黑臭水体治理与水质长效改善,黑臭水体修复的研究主要集中在原位修复技术和组合修复技术,原位修复技术还可分为物理法、化学法、生物生态法[3],而关于黑臭水体修复装备设计开发的研究就很缺乏,仅有漂浮式修复装置[4]、固定式修复装置[5]、沉浸式修复装置[6]、过滤式修复装置[7]等。但是,人工进行河道黑臭水体修复作业存在健康危害大、作业效率低等问题,因此,急需研发应用黑臭水体修复装备。
本文选用樊开青提出的碳纤维生态草技术协同曝气修复黑臭水体技术[8]、曲面优化高铁酸钾与活性炭协同修复黑臭水体技术[9],进而确定采用“投加微生物菌剂+鼓风曝气+投放炭纤维生态草”的黑臭水体修复技术。为实现该修复技术的作业过程机械化,研发一种河道黑臭水体原位修复无人船,以提高黑臭水体修复作业的移动性、安全性和快速性。
1 整机结构和工作原理
1.1 整机结构及参数
河道黑臭水体原位修复无人船主要由船体行驶系统、微生物菌剂投加系统、鼓风曝气系统、炭纤维生态草投放系统、自动控制系统和供电系统等组成,如图1所示,船体行驶系统由船体、叶轮、船体推进电机、船体推进处联轴器、方向舵、方向舵驱动电机、方向舵驱动机构、甲板等组成;微生物菌剂投加系统由储液箱、旋转阀、流量计、微生物菌剂投加电磁阀、微生物菌剂投加管、搅拌电机、搅拌叶片等组成;鼓风曝气系统由空气压缩机、输气电磁阀、输气管、电动推杆、曝气杆、微型曝气孔等组成;炭纤维生态草投放系统由储草箱、炭纤维生态草投放驱动电机、炭纤维生态草投放处联轴器、炭纤维生态草投放处变速箱、炭纤维生态草投放控制叶片等组成;自动控制系统由电气控制柜和电线等组成;供电系统由蓄电池组和电源逆变器等组成。
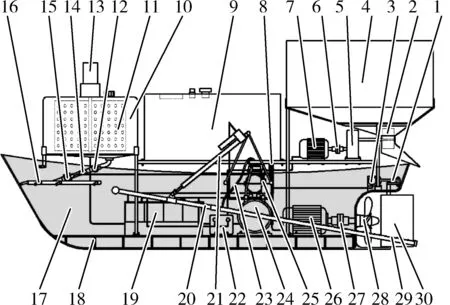
图1 无人船的结构示意图
船体内底部设置甲板,甲板上左右居中地安装蓄电池组、电源逆变器、空气压缩机、船体推进电机等,以使整个无人船的重心较低;微生物菌剂投加系统、鼓风曝气系统、炭纤维生态草投放系统等通过机架左右对称地安装在船体上方,以便平稳地进行黑臭水体修复作业。
该无人船的主要技术参数见表1。

表1 河道黑臭水体原位修复无人船的主要技术参数Tab. 1 Main technical parameters of unmanned boat for in-situ restoration of river black-odor water body
1.2 工作原理
河道黑臭水体原位修复无人船作业时,由船体推进电机带动叶轮转动产生推动力、并由方向舵驱动电机通过驱动机构带动方向舵转动实现船体转向;搅拌电机带动搅拌叶片转动,使微生物菌剂在储液箱里保持搅匀状态,再通过微生物菌剂投加电磁阀控制微生物菌剂从多个管道口投加到河道水体中;空气压缩机产生的压缩空气经输气电磁阀输入曝气杆,电动推杆将曝气杆转动河道水体较深处,曝气杆上的多个微型曝气孔持续向水体中曝出压缩空气;储草箱中放满圆柱状生态草,炭纤维生态草投放驱动电机带动储草箱底部出口处的炭纤维生态草投放控制叶片转动,以连续平缓地向河道水体中投放炭纤维生态草;蓄电池组对各个电动机、各个电磁阀、电气控制柜进行供电,电气控制柜接收河岸上发来的控制信号、并驱动各个电动机和各个电磁阀工作,实现无人化作业。
2 关键部件的设计
2.1 船体的设计
船体的外形曲面由船体型线决定,船体型线可根据船舶主要要素、并参考母型船进行设计[10]。河道黑臭水体原位修复无人船属于简单的小型船,在船体设计时可以进行适当的简化,根据该船的使用要求:船体承载能力≤200 kg、船长约为2 200 mm、船宽约为970 mm、吃水深度约为300 mm、型深约为105 mm、船速估计≤10 km/h,并考虑到船行驶时的稳性,设计出了该船的船体型线,如图2所示,从而为该船的结构设计、放样制造等提供了依据。
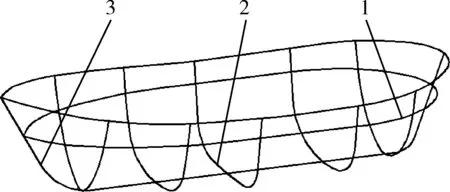
图2 船体型线图
2.2 方向舵驱动机构的设计
方向舵处于叶轮正后方的左右居中位置,黑臭水体修复无人的转向靠方向舵的转动实现。转向时,由方向舵驱动电机带动滚珠丝杠、再经连杆带动方向舵转动;直行时,滚珠丝杠上的方形螺母保持在滚珠丝杠的中间位置。方向舵驱动机构由曲柄滑块机构与滚珠丝杠串联而成,方形螺母用作滑块,如图3所示,其中,转动副A的配合间隙留得稍大一些,以防出现卡死现象,方向舵的转角范围在-50°~+50°。

图3 方向舵驱动机构运动简图
2.3 微生物菌剂投加装置的设计
微生物菌剂加入清水混合,先将其注入储液箱,并在搅拌叶片的持续搅动下保持均匀混合状态,再通过微生物菌剂投加管投入河道水体中。微生物菌剂投加装置主要通过储液箱底部出口联接微生物菌剂投加管实现(图4),微生物菌剂投加管上装有微生物菌剂投加电磁阀,以控制微生物菌剂是否投加;微生物菌剂投加管在紧贴船体处分成左右对称的两根,每根投加管上设置几个细管穿出船体,以便于向河道水体投加微生物菌剂。
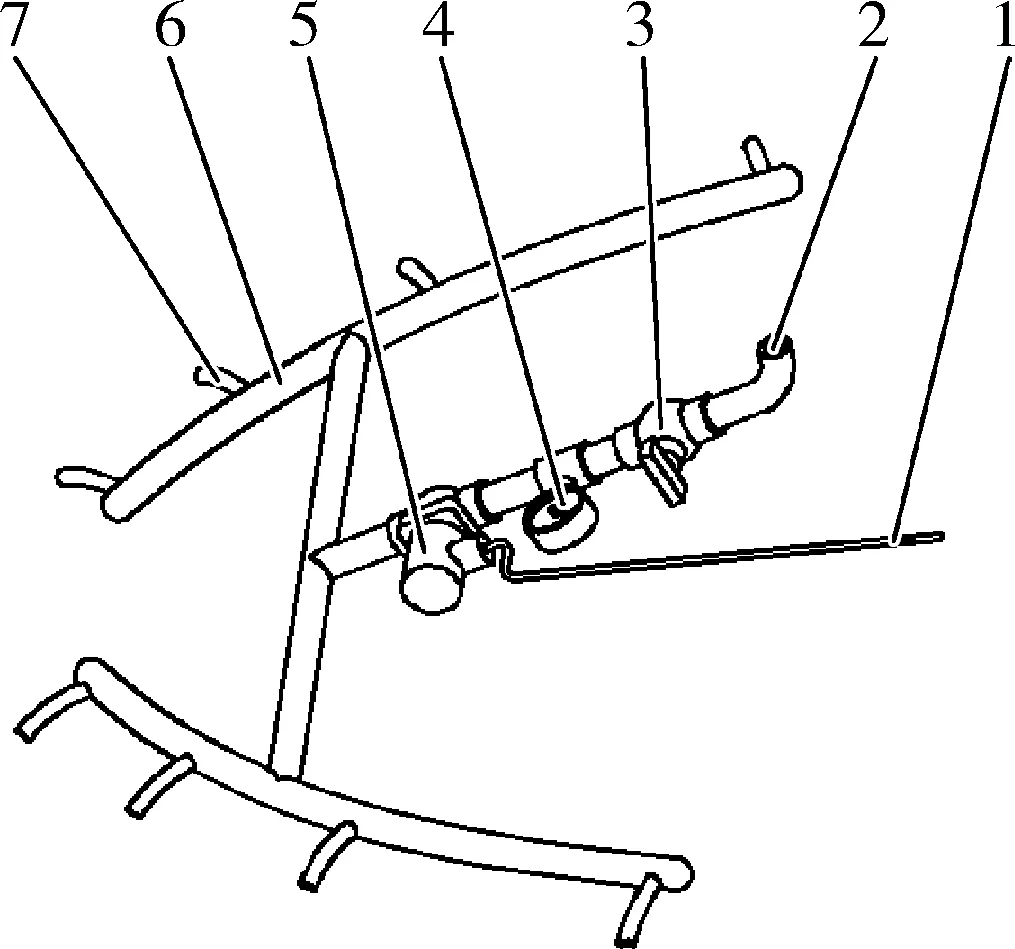
图4 微生物菌剂投加装置
2.4 鼓风曝气装置的设计
鼓风曝气装置左右对称地与船体及机架紧固联接,左右两边的推转管可以绕与船体联接的横杆转动,曝气杆与推转管紧固联接成一直线,每根曝气杆的首端联接输气管、中段安装30多个微型曝气孔、末端安装盖子,如图5所示,以便将输气管里的压缩空气经曝气杆上的微型曝气孔吹出至河道水体较深处。
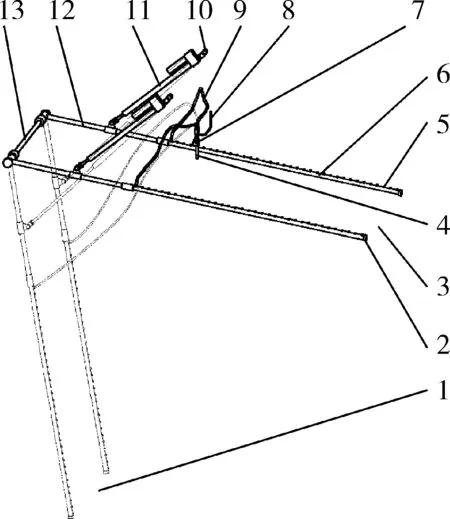
图5 鼓风曝气装置
曝气时,左右两边的电动推杆都伸出,分别推动左右两边的推转管转动大约70°,将曝气杆转入了河道水体较深处,再接通输气电磁阀,将空气压缩机里的压缩空气输出;不曝气时,左右两边的电动推杆都缩回,将曝气杆接近水平地紧靠船体两侧上部,再断开输气电磁阀,停止输出压缩空气。曝气作业过程若有河道水体进入曝气杆,可以拧开曝气杆末端的盖子、将水体排出,再拧上盖子即可正常进行曝气作业。
2.5 炭纤维生态草投放装置的设计
为了便于使炭纤维生态草在黑臭水体中停放较长的时间,将多层塑料圆盘悬挂的炭纤维生态草与较薄的圆柱形泡沫块用水溶胶粘接成较厚的圆柱状颗粒,当投放到黑臭水体中以后,泡沫块浮于水面上、多层塑料圆盘挂接于泡沫块下、炭纤维生态草悬挂于水下多层塑料圆盘下,经10多天挂膜之后,再将泡沫块及炭纤维生态草一起打捞走。
炭纤维生态草投放装置上部是储草箱,箱体底部有一个长方形的出口,在出口处安装了炭纤维生态草投放控制叶片,在出口下方焊接出料槽,如图6所示。投放炭纤维生态草时,炭纤维生态草投放驱动电机带动周向均布的5个炭纤维生态草投放控制叶片转动,圆柱状的炭纤维生态草颗粒被拨动从储草箱底部长方形出口掉到出料槽,并沿着出料槽滑入河道水体中;不投放炭纤维生态草时,停止炭纤维生态草投放驱动电机的转动,炭纤维生态草投放控制叶片在不转的状态下堵住了存放箱底部长方形出口,炭纤维生态草颗粒也不会被投入河道水体中。炭纤维生态草的投放速度由炭纤维生态草投放驱动电机的转速决定。
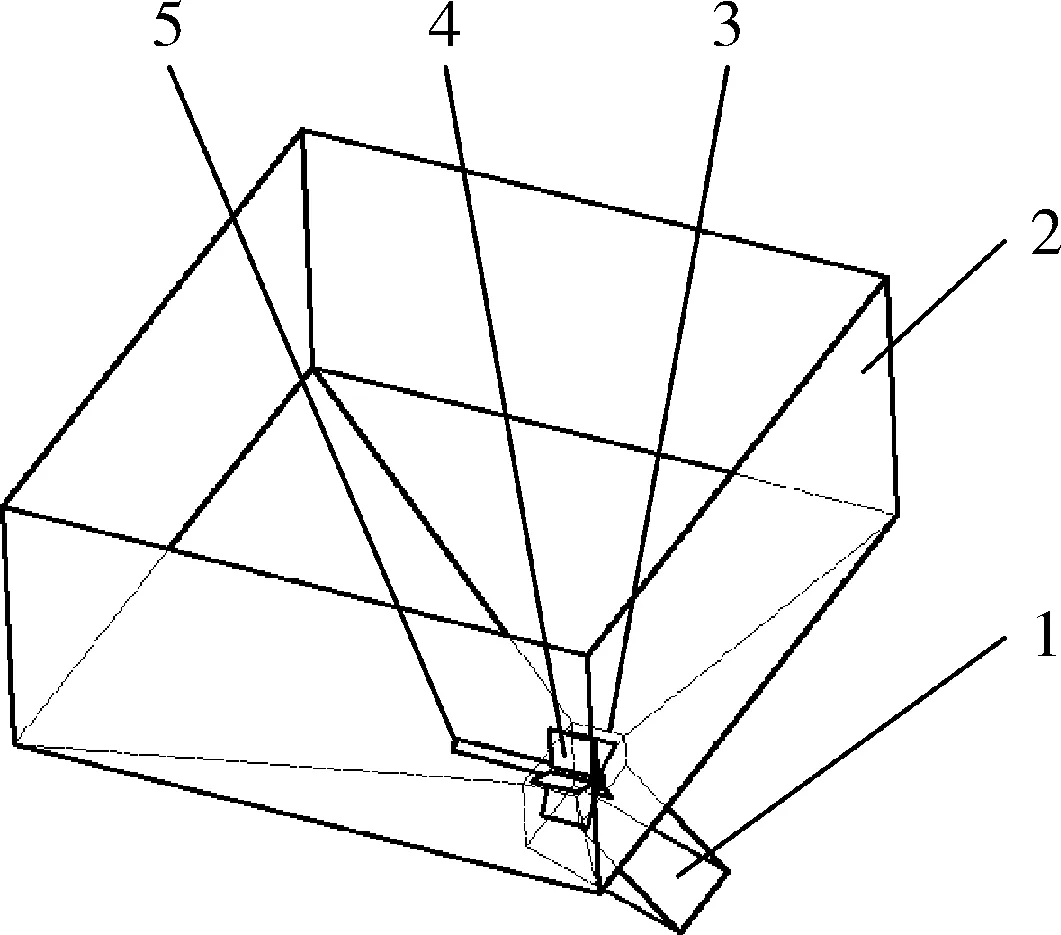
图6 炭纤维生态草投放装置
3 控制及通信系统的设计
3.1 自动控制系统的设计
PLC是一种工业自动控制装置,广泛应用于各种机械或生产过程的控制,现采用西门子PLC为核心控制器进行河道黑臭水体原位修复无人船的自动控制。
自动控制系统的硬件部分主要是西门子S7-200 SMART PLC、MCGS触摸屏、24 V船体推进电机,直流24 V方向舵驱动电机、交流220 V搅拌电机、交流电磁阀、交流220 V空气压缩机、直流电动推杆、电动推杆限位开关、MPBS超声波传感器、交流220 V生态草投放电机等。PLC的I/O地址分配见表2,PLC控制系统的I/O外部接线图,如图7所示。通过触摸屏也可以操控河道黑臭水体原位修复无人船。
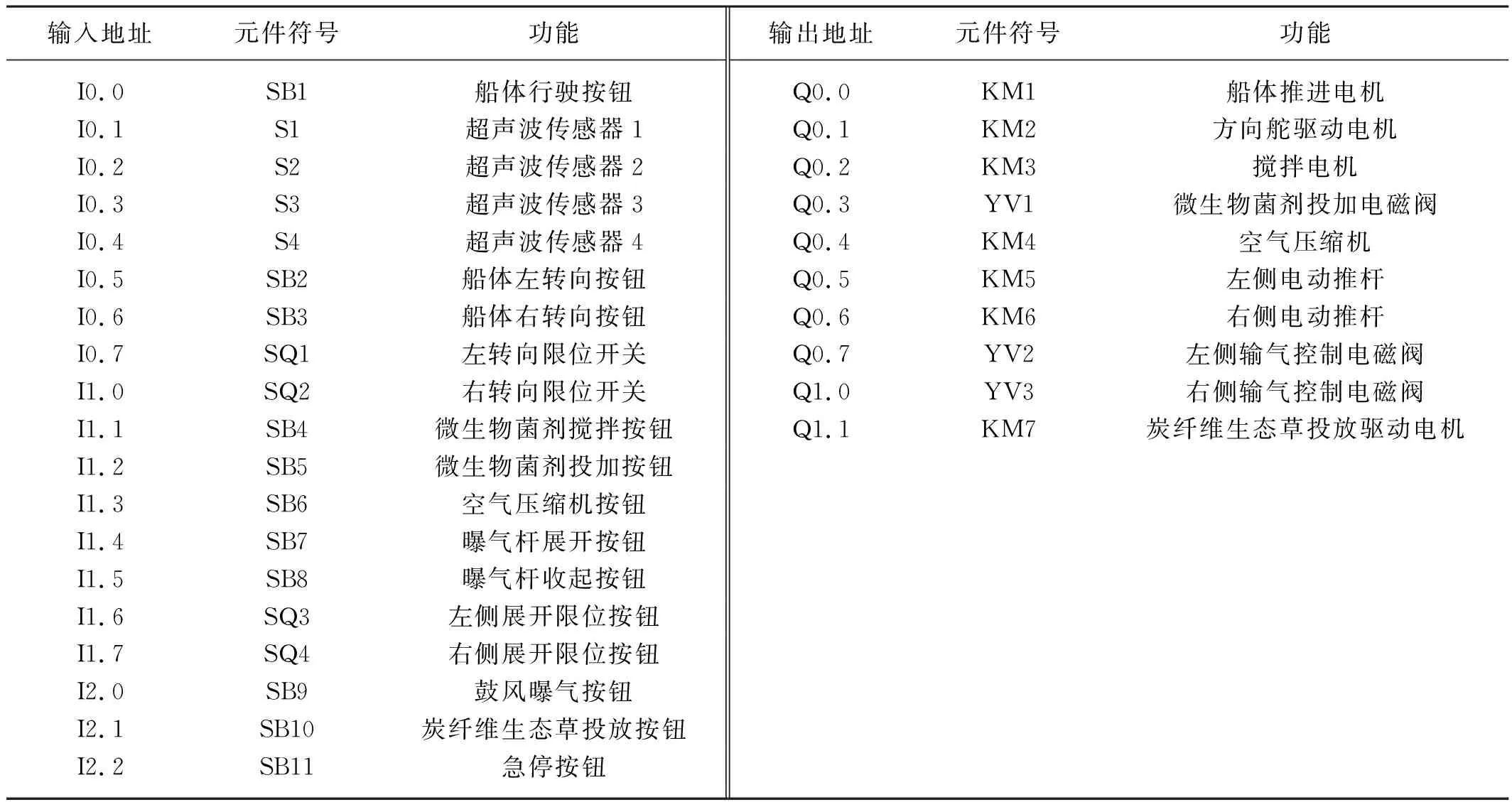
表2 无人船PLC控制系统的I/O地址分配表Tab. 2 I/O address allocation table of PLC control system for unmanned boat
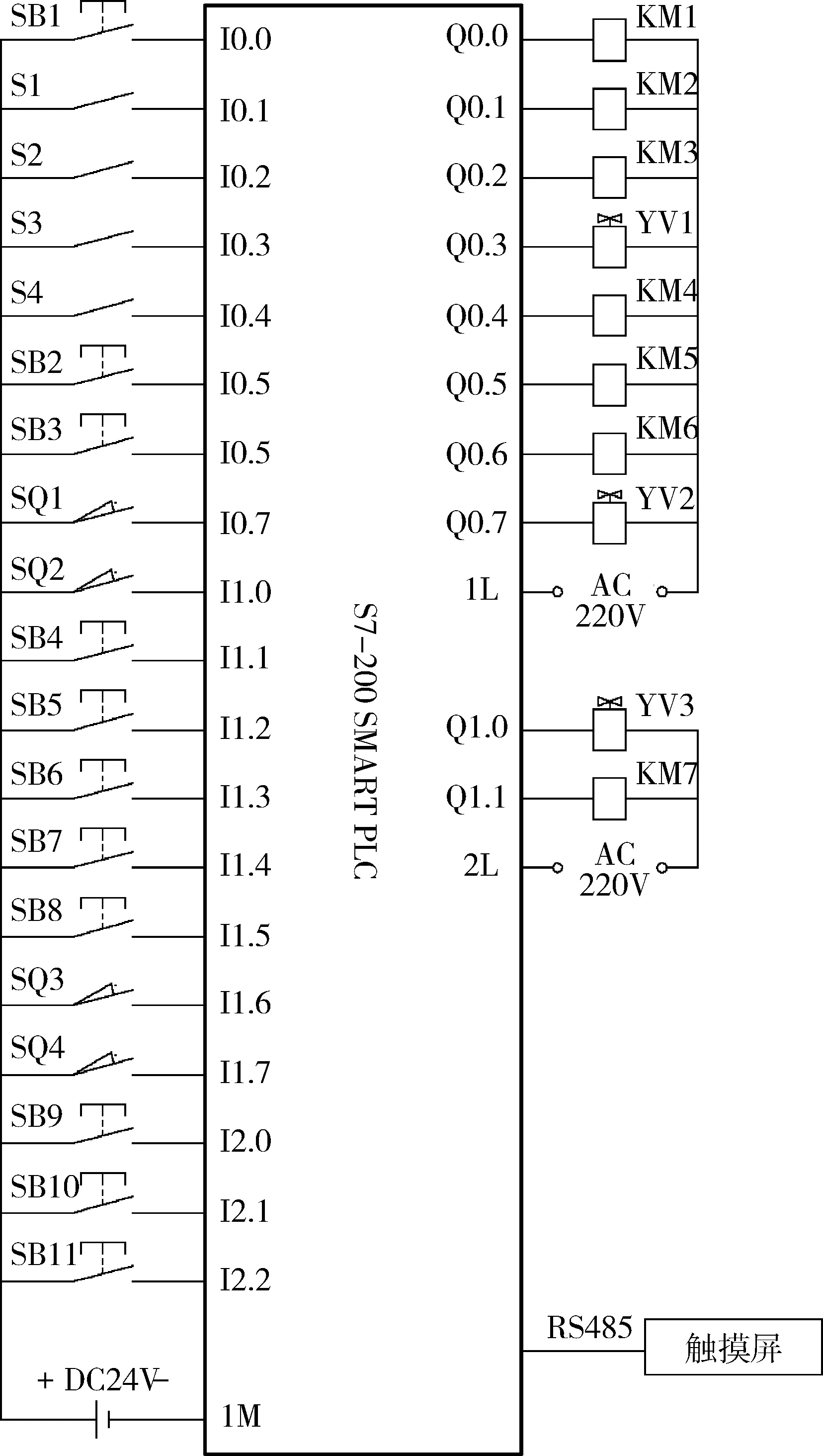
图7 无人船PLC控制系统的接线图
自动控制系统的软件部分采用西门子STEP 7-Micro/Win SMART软件进行梯形图编程,自动控制系统的程序流程图,如图8所示。

图8 无人船自动控制系统的程序流程图
对于船体的行驶控制,启动船体行驶按钮以及必要时启动船体向左或向右转向按钮即可,左转向或右转向限位开关会限制方向舵的极限转角,船体周围设置四个超声波传感器会在检测到障碍物时停止船体行驶。
对于微生物菌剂投加控制,启动微生物菌剂搅拌按钮和微生物菌剂投加按钮即可;对于鼓风曝气控制,先启动空气压缩机按钮和鼓风曝气按钮、再启动曝气杆展开按钮即可,左侧和右侧展开限位开关会限制曝气杆展开的极限位置;对于炭纤维生态草投放控制,启动炭纤维生态草投放按钮即可。
3.2 无线通信系统的设计
在河岸上对河面上黑臭水体原位修复无人船的操控要采用无线通信方式,现选用传输速率较快、网络信号较稳定的NB-IoT对无人船进行远程控制。无线通信系统由无人船上的PLC、NB-IoT无线网关、手机APP等组成,如图9所示,PLC与触摸屏、NB-IoT无线网关等采用有线方式通信,再通过NB-IoT无线网关上传数据到云平台或接受云平台的控制命令,并通过手机APP与云平台通信来实现远程控制河道黑臭水体原位修复无人船。
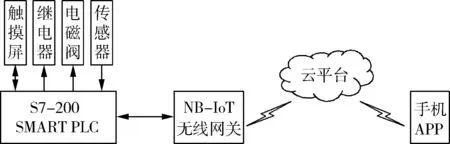
图9 无人船无线通信系统
4 样机的三维设计
本文采用UG软件进行河道黑臭水体原位修复无人船的三维建模,以便于后续进行该无人船的样机制造。对于船体,主要是根据船体型线、并通过[网格曲面]命令创建;对于蓄电池组、电源逆变器、储液箱、电气控制柜、储草箱等,主要是通过[拉伸]命令创建;对于各个电动机、空气压缩机等,主要是通过[旋转]命令创建;对于微生物菌剂投加管、输气管等,主要是通过[管道]命令创建。在各零部件的创建过程中,要准确创建关键尺寸、外观形状等,可以简化不重要的尺寸、内部结构等,另外,对于多个相同的零部件,只需创建一次。在进行零部件的虚拟装配时,要先采用[原点]定位方式装入船体,然后采用[约束]关系依次地装上甲板、甲板上的各零部件、机架上的各零部件等。创建完成后,所得的样机三维模型如图10所示。
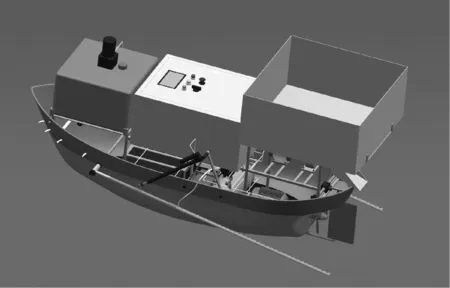
图10 无人船样机的三维模型
5 现场试验
5.1 试验条件
2020年12月,在某市城边的某黑臭河道进行了现场试验。河面宽度≥10 m、河面长度≥3 km、河水深度≥2 m,河道水体流动性差。现场风力≤2级、现场温度≈7 ℃、多云天气。河道黑臭水体原位修复无人船沿河面宽度方向“S”型路径行驶。
5.2 试验结果分析
在河道黑臭水体原位修复无人船进入稳定作业阶段后,进行各项作业性能参数的测定,试验结果见表3。
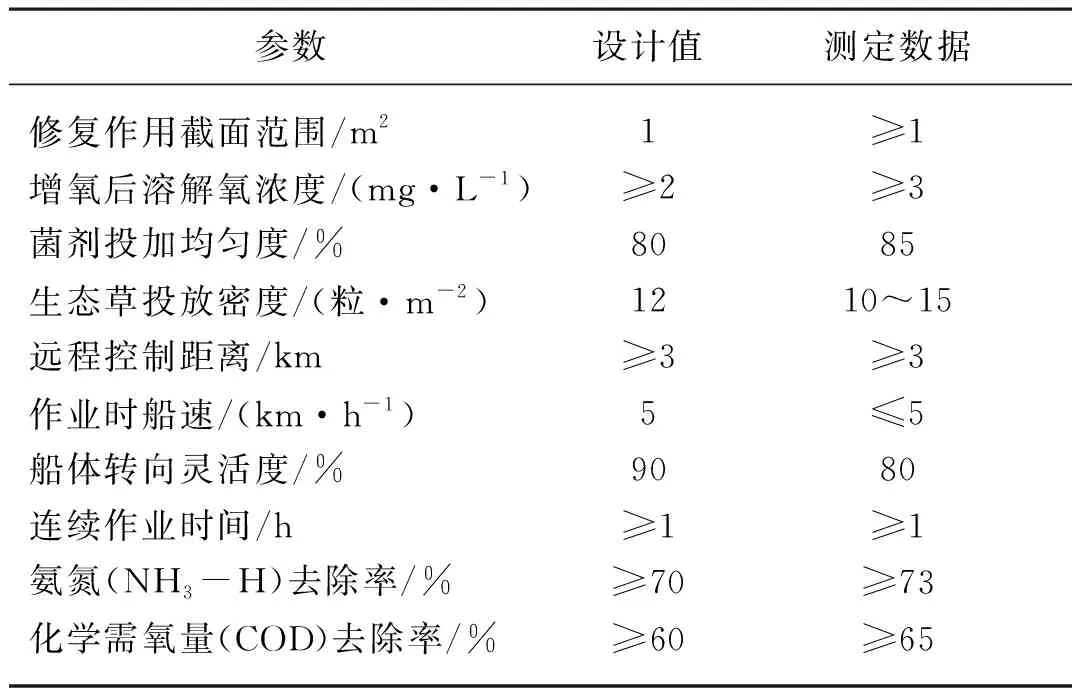
表3 河道黑臭水体原位修复无人船性能试验结果Tab. 3 Performance test results of unmanned boat for in-situ restoration of black-odor river water body
从表3可知,修复作用截面范围的测定值比设计值略大、船体转向不够灵活,是由于船体实际尺寸比设计值稍大了一些;增氧后溶解氧浓度的测定值比设计值略大,是由于实际采用的空气压缩机功率比设计值大;微生物菌剂投加均匀度粗略测定显示较均匀;炭纤维生态草投放密度的测定值与设计值相差较大,是由于投放速度与船速、投放控制叶片转速等都有关;远程控制距离的测定值比设计值略大,是由于通讯信号条件较好;作业时船速的测定值比设计值小,是由于船体直行区段短;连续作业时间的测定值比设计值大,是由于能装载容量大的蓄电池组,水体中的氨氮(NH3-H)和化学需氧量(COD)去除率的测定值比设计值大,是由于原位修复技术选用得当。总体来看,试验结果符合设计要求。
6 结论
1) 为满足所采用黑臭水体原位修复技术的组合作业要求,设计了无人船的行驶系统、微生物菌剂投加系统、鼓风曝气系统、炭纤维生态草投放系统等。能对大面积河道进行移动作业、且作业效率是人工的5倍以上,具有装备使用率高、作业效率高、劳动强度低的效果。
2) 为实现对无人船行驶系统及各个修复作业系统的远程控制,设计了PLC控制系统和NB-IoT通信系统。远程控制距离≥3 km,使工人可以远距离进行修复作业,减少了黑臭水体对工人的健康危害。
3) 性能试验结果表明:修复作用截面范围≥1 m2、增氧后溶解氧浓度≥3 mg/L、菌剂投加均匀度85%、生态草投放密度10~15粒/m2,水体中的氨氮(NH3-H)去除率≥73%、化学需氧量(COD)去除率≥65%,各项指标符合设计要求。
4) 河道黑臭水体原位修复无人船是针对典型的黑臭水体原位修复技术设计的,值得生产并推广应用,同时,也为开发针对其他黑臭水体原位修复技术的装备,提供了技术参考。
猜你喜欢
装备环境工程(2022年7期)2022-08-10
智能建筑与智慧城市(2021年11期)2021-12-08
民用飞机设计与研究(2021年1期)2021-04-06
机械设计与制造工程(2020年8期)2020-09-03
天津农林科技(2020年3期)2020-08-13
园林科技(2020年2期)2020-01-18
今日农业(2019年11期)2019-08-13
粉末冶金材料科学与工程(2019年2期)2019-05-08
北京航空航天大学学报(2017年9期)2017-12-18
现代农业(2016年5期)2016-02-28