船舶机舱辅机设备振动监测系统设计
2021-04-14 02:03王之民陈松涛胡祥平
江苏船舶 2021年1期
王之民,陈松涛,胡祥平
(镇江赛尔尼柯自动化有限公司,江苏 镇江 212000)
0 引言
船舶辅机设备运行工况为短时大功率、连续启停或连续高速运行等,变工况和辅机设备所处的复杂工作环境共同加快了设备磨损,且自身产生并叠加船体振动,易导致设备故障。如不及时排除隐患,将造成辅机设备不可逆的损坏,增加设备额外的维修费用[1]。
受制于国外价格高昂的振动监测系统,船东无法为船舶大面积装配在线式振动检测系统,更多采用手持式振动检测装置。虽然手持式振动检测装置检测速度快且结果精确,但是完成众多设备的单次检测周期仍耗时较长。此外,还因为周期性监测的原因,无法在第一时间检测到设备故障的发生。
本文基于三轴加速度传感器模块设计了振动状态采集模块。该模块在Modbus协议的基础上结合WPF框架开发上位软件并根据振动烈度评价标准,实现对船舶辅机设备振动状态的实时监测,并能够及时监测到异常振动状态,从而避免了有害振动对辅机设备造成进一步损害。
1 监控系统总体设计
1.1 系统功能要求
为满足未来船舶的发展需求,结合中国船级社《智能船舶规范》(2020),设计了振动监测系统。该系统可实现对辅机振动状态的实时监测,并将数据存储进数据库,以解决传统检测方式耗时且无法第一时间发现故障的问题。具体功能包括:
(1)实时振动数据查询:对于所有被监测的辅机设备,能够在上位机端实时显示其振动频谱与振动烈度评级。
(2)振动异常报警:当辅机设备出现振动异常情况,提示报警,并存储报警信息。
(3)历史数据查询:能够查询特定时间段的历史数据。
(4)手动存储:针对特定振动状况能够手动存储当前的振动数据。
(5)定时存储:能够定时存储所有监测辅机设备的振动数据。
1.2 系统总体设计
整个系统由振动传感器模块、数据采集服务器和上位机3个部分组成。振动传感器模块包括加速度传感器、主控单元和通讯模块。加速度传感器采用微机电系统(MEMS)加速度传感器,通过主控单元将实时数据进行预处理、加窗、快速傅里叶变换后传输到数据采集服务器,再由数据采集服务器转发到上位机。其系统结构框图见图1。
2 振动传感器模块硬件设计
振动传感器模块主要由MEMS传感器、MCU模块和通讯模块共同组成。MEMS振动传感器具有低功耗、轻质量、高灵敏度、低噪声值的特点[2],能够较好地采集辅机设备的振动信息。本系统设计采用ADIS16227型号的加速度传感器。该传感器最大检测加速度为70g,最大采样频率为100.2 kHz。MCU模块采用STM32F103低功耗ARM微处理器,通过SPI接口与传感器进行数据通讯。
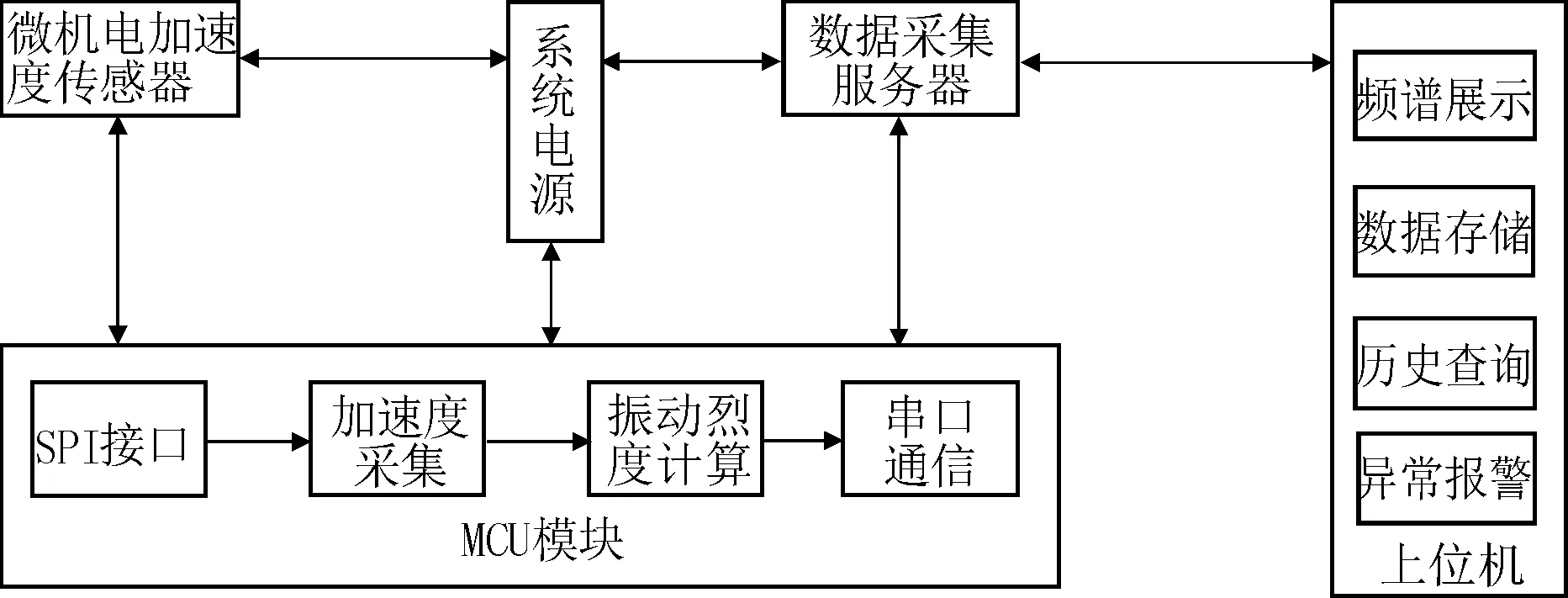
图1 系统结构图
3 振动信号处理
船舶辅机设备健康评估通常采用振动速度作为判断依据。在实际工程中,受到传感器的制约,大多数情况下只能得到振动加速度信号。本文从传感器读取加速度信号后进行积分处理得出速度信号。对于积分方式,主要有时域积分和频域积分2种[3]。
3.1 时域积分
从传感器得到的振动加速度信号,即时域加速度信号序列为
a=a(k),k=1,2,…,N
式中:a为加速度信号序列;k为某一个点的采样序号;N为采样点数。
加速度信号包含了传感器噪声和直流分量,需对原始数据进行零均值处理,消除趋势项,则有如下公式:

根据梯形积分法[4],对应速度时域序列为
式中:v(k)为时域速度序列;Δt为采样间隔。
3.2 频域积分
频域积分原理主要利用傅里叶变换的积分原理,对去除趋势项的加速度信号a′进行傅里叶变换,同时为了减小频谱泄露加入汉宁窗得到:

式中:A(k)为经处理后时域加速度信号傅里叶变换序列;w(n)为汉宁窗序列;a′(n)为时域加速度值;j为虚数单位[5];n为某一个点的采样序号。
根据频域积分定理,则速度频谱为
式中:V(k)为速度频谱序列;A(k)为加速度频谱序列;fs为采样频率;j为虚数单位。
3.3 仿真对比
为了对比2种方法的优劣,假设加速度信号为
a=100πcos 100πt-200πsin 60πt+
300πsin 300πt+μ
式中:μ为随机噪声。
设定采样频率为1 566 Hz,采样点数为512。利用时域和频域2种积分方式得到的速度波形对比结果见图2。图中,横坐标t为采样时间,纵坐标v为速度值。
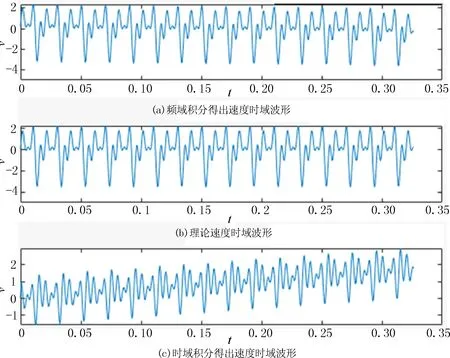
图2 2种积分方式对比图
采用平均峰值误差作为评价标准,时域积分平均峰值误差为36.50%,频域积分平均峰值误差为5.62%。从图2可以看出,时域积分误差较大,并且出现明显偏移。在实际开发中使用频域积分方法,可以避免出现原理性偏移的现象。
3.4 振动烈度计算
振动烈度定义为某一频率范围内振动速度的均方根值,能够反映一台机械设备的振动状态。根据上节结果,本设计采取频域积分的方式计算振动烈度。速度频谱为
式中:W(k)为圆周序列。
由于加窗会对加速度信号的幅值谱产生影响,需要加入恢复系数K[6]。本设计中窗函数为汉宁窗,所以K=2.667。则振动速度有效值为
式中:Vrms为振动速度有效值。
本设计采用的三轴加速度传感器能够采集3个分量上的振动信号,根据《船舶机舱辅机振动烈度的测量和评价》,最终辅机设备的振动烈度Vs为
式中:Vs为辅机设备振动烈度值;Vxrms、Vyrms、Vzrms分别为3个互相垂直方向上的振动速度均方根值。振动烈度计算流程见图3。

图3 振动烈度计算流程
4 上位机开发
开发基于WPF框架的船舶辅机设备振动监测软件,其核心程序包括振动数据读取、振动烈度计算和数据存储。数据读取采用定时读取方式,上位机通过标准ModbusTcp协议从数据采集服务器读取振动加速度数据,并进行振动烈度计算。由于振动监测数据量大,因此对数据库存储和管理要求较高。根据单次采集三轴振动数据量,定时存储时间设置为10 min,同时可以通过手动存储按钮进行数据主动保存。采用MySQL数据库,根据日期+设备名的方式创建表,按照时间、振动烈度值、时域数据等不同参数创建列。上位机软件可以指定时间段查询历史数据,并可将查询结果导出至EXCEL。
5 结论
(1)本文振动监测系统利用傅里叶变换中频域积分的原理,得出加速度与速度之间的转换关系。
(2)利用成熟的Modbus协议与配套开发的上位机系统,实现了振动数据的采集、显示与存储,克服了传统监测方式中无法第一时间监测到设备异常振动的问题,同时为设备振动分析提供数据依据。
本系统在“中华复兴”号客滚船一段时间的运行使用,验证了检测系统的稳定可靠,有效地提高了管理人员对机舱设备的管理能力,减少了因设备异常故障所造成的损失。
猜你喜欢
地震研究(2021年3期)2021-11-10
地震研究(2021年3期)2021-11-10
花火彩版B(2020年5期)2020-09-10
振动工程学报(2019年2期)2019-05-13
物联网技术(2016年11期)2017-01-12
科学与财富(2016年18期)2016-12-22
电脑知识与技术(2016年13期)2016-06-29
能源研究与信息(2015年3期)2015-11-18
能源研究与信息(2014年3期)2014-10-30