月面灵巧探测网络系统设计探讨
2021-04-14 03:10:00曹素芝李昌浩王厚鹏
载人航天 2021年1期
曹素芝,李昌浩,2,王厚鹏,2,孙 雪,2
(1.中国科学院空间应用工程与技术中心,北京100094;2.中国科学院大学,北京100049)
1 引言
月球是离地球最近的唯一天然卫星,月球探测不仅可以了解月球的成因、演化等信息,同时还为月球中各种稀缺资源的开发提供信息支撑。然而月球高真空、强辐射、昼夜温差大等特性使得月球探测具有极大的技术挑战。目前许多国家和机构都将月球探测作为深空探测的第一步,月球探测活动陆续开展。探测方式从飞越、环绕、硬着陆逐渐发展到软着陆、月面巡视及航天员登月考察等。在这些方式中,对月球的远距离无接触探测无法获取实际样本参数,观测误差较大。着陆月球探测的巡游式、站点式方案还存在覆盖面积有限、实施复杂、部署周期长等不足。因此需要探索新的低成本、可快速实施的探测手段,具备可灵活扩展、覆盖面广、长时间续航的探测能力,使其能够完成对探测盲区的补漏覆盖以及对目标区域的快速应急探测。
无线传感网通过分布在检测区域内的传感器节点获取最直接、有效、真实的信息,并通过无线自组织的网络传递信息。无线传感网在国防和军事、自然环境感知、工业生产等领域广泛应用,其实时监测、感知、采集和传递环境信息的能力已经得到充分验证。将无线传感网络应用到月面探测中,能够实现对巡游式、站点式探测的有益补充。
本文结合无线传感网络设计理念,提出一种高效的月面分布式探测系统架构。针对月表环境特性,设计单个物理探测节点,并基于各节点构建分布式与集中式结合的月面灵巧无线网络系统。选取月球南半球面积约1000 km的典型区域进行仿真,并在地面环境搭建仿真验证系统,对分布式通信组网进行初步功能与性能测试。
2 系统架构
2.1 系统设计
月球探测网络系统的设计需考虑月面环境、检测对象和处理单元等特性。从节点模型和月面布局着手,依据数据处理流程构建探测网络系统框架,总体互联关系如图1所示。分散在月面的各传感网络组成感知节点层,实现智能感知和交互功能,包括信息采集与通信等。网络接入层主要实现信息接入、传输和通信,关注实现月面探测网络大范围的覆盖与信息共享。地月双向通信层也是数据的处理层,完成探测信息的及时分析与科学研究,总体框架如图2所示。围绕数据的采集、传输和处理环节分为物理层、网络层和应用层。

图1 总体互联架构图Fig.1 Diagram of the overall interconnection architecture

图2 月面灵巧探测系统逻辑架构图Fig.2 Logic structure diagram of the lunar dexterous detection system
2.2 物理层
受月表特殊环境的影响,尤其是昼夜高温差对探测网络节点的正常工作提出了严峻考验。物理节点承担整个探测系统数据采集,是系统的数据来源。
通常,传统探测器节点包括:①处理器模块,能够接收数据并实现数据融合;②无线通信模块,完成传感器节点之间的无线通信;③传感器模块,实现对外界环境的感知,即数据采集的功能;④能源模块,由蓄电池为传感器节点各部分提供能源。本文对月球表面灵巧探测器节点进行模块化设计,模块组成及模块之间的连接如图3所示。
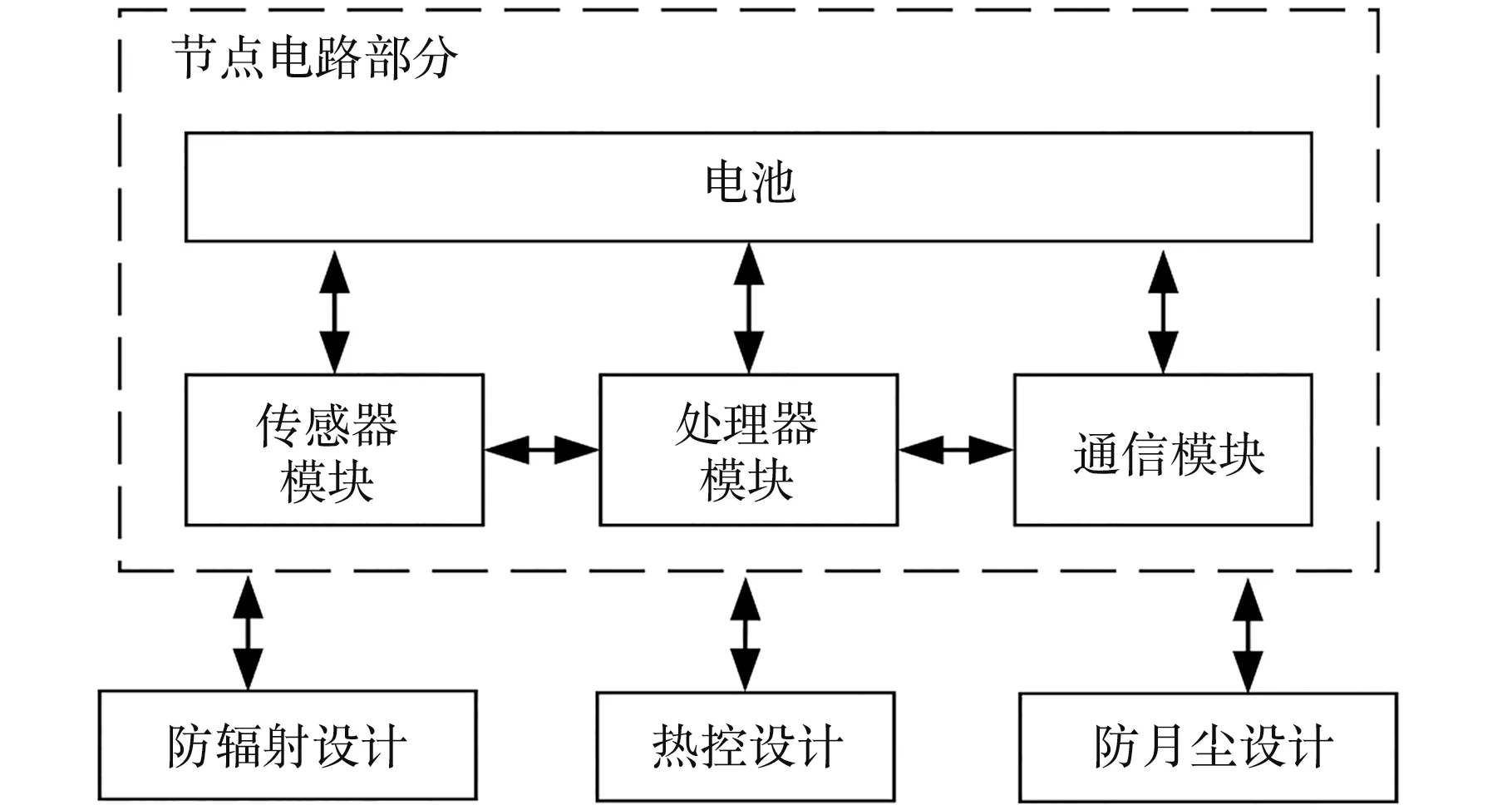
图3 探测器节点设计图Fig.3 Diagram of the detector node design
2.2.1 传感器模块
传感器模块可根据需求进行定制,比如温度传感器、辐射传感器、月壤成分分析传感器、水资源探测传感器、矿物探测传感器等,分别检测月表温度、月表紫外线强度,分析月壤成分以及探测月壤中的水冰成分等。
2.2.2 处理器模块
处理器模块的设计要求是低功耗、抗辐射、耐高低温。计划使用Cobham公司基于ARM Cortex-M0+的宇航级单片机芯片UT32M0R500。该芯片提供多种电源控制模式,功能模块可编程的使能和去使能,时钟门控、升降频等措施,为实现处理器模块的低功耗和全状态能耗优化提供基础和可能。
2.2.3 通信模块
无线传输方式主要包括蓝牙、WiFi、ZigBee、NB-IoT和LoRa。其中LoRa技术传输速率低,能耗、设计难度及制造成本均低于其他技术,适用于低速率、低功耗的工作场合,因此基于Semtech公司的新一代低功耗LoRa芯片SX1262(长距),设计了通信模块,实现分布式组网通信。
2.2.4 供电模块
地面传感器节点一般采用一次性电池供电,电量不足后可以通过更换电池实现持续工作。对于月面传感器节点需要设计一种新型的无人干预的供能手段,使无线传感器在长期无人监测的环境下仍能够正常工作。无线灵巧传感节点要实现长期免干预工作方式,重要的是利用应用环境条件进行续能和适当存储。目前,在月球和地面许多情形下,静态节点最方便获取且取之不尽的能源是太阳能;同时根据传感节点周期性工作特点,以及考虑到通常储能元件可充电次数(工作寿命)问题,结合有机超级电容和锂离子电池或石墨烯锂电池为传感节点供电是一个可行的解决方案。该方案能够在减少对锂电池充电次数的同时,提供对锂电池过度放电的保护措施,以延长锂电池的工作寿命,达到利用太阳能提供长时间、无人干预的供电效果。
2.2.5 防辐射设计
传感器运行环境为月面环境,可以通过增加外壁厚度设计,以满足抗辐照设计要求。防辐射模块使用电磁屏蔽体,能够使内部器件免受外界空间电磁场的影响;对于紫外辐射,一般的解决方法是选择紫外吸收率很低的涂层。针对模块的辐照性能,有效的加固措施是采用Al制外壳。Al的厚度为3 mm时,10年的辐照总剂量约为910 rad。
2.2.6 热控设计
针对月球表面的超高温与超低温环境,通过多层封装的方式将内部温度环境与剧烈变化的外部热环境隔离,确保灵巧探测器工作在规定的温度范围内。封装方式如图4所示。
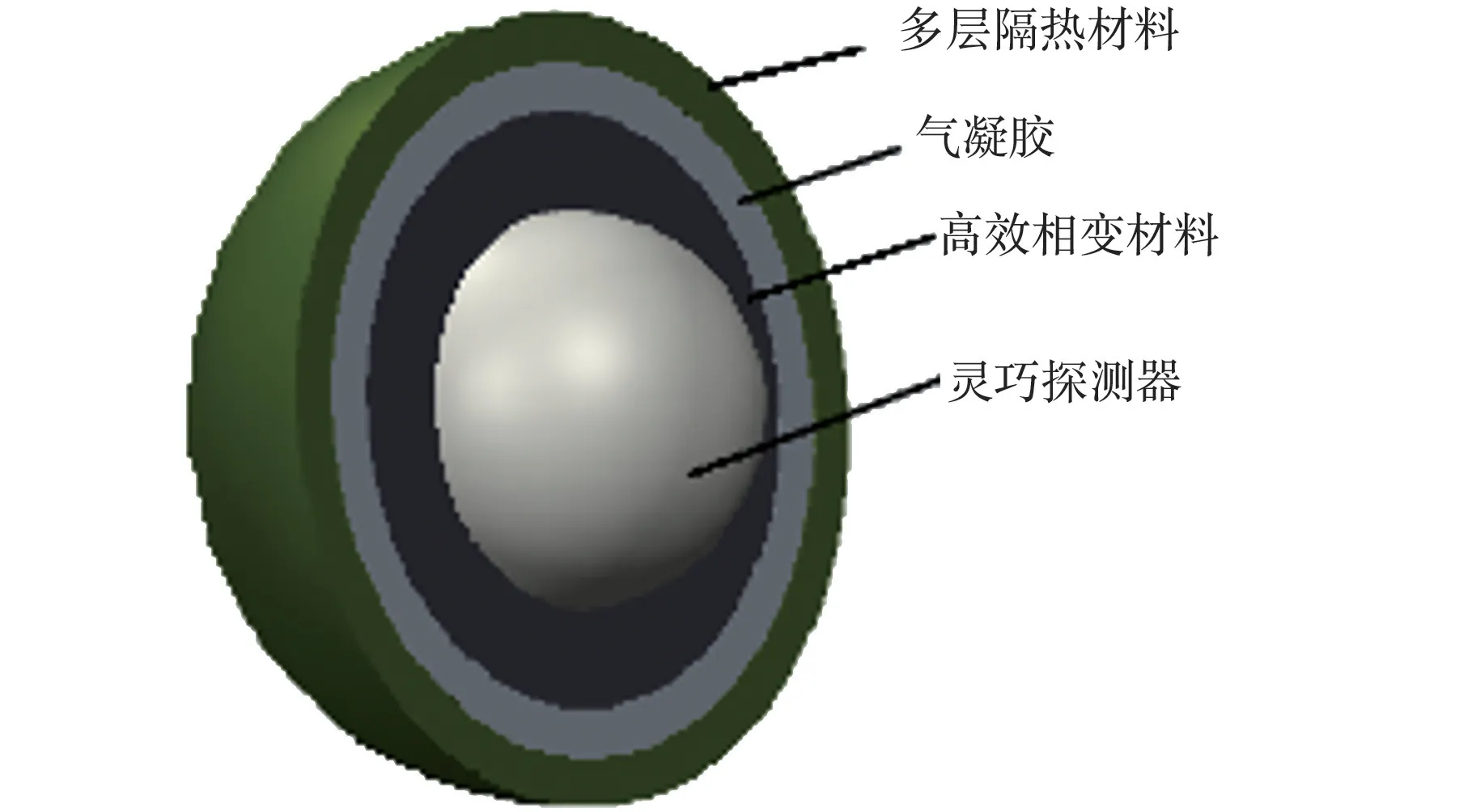
图4 灵巧探测器隔热设计Fig.4 Thermal insulation design of the dexterous detector
多层隔热材料由高反射率的反射屏和低热导率的间隔层交替叠合而成,在保温同时可提供隔热效果。隔热组件利用屏面的反射,对辐射热形成较高的热阻,在真空下具有极好的隔热性能,其当量热导率理论上可低至5~10 W/(m·K)的量级。气凝胶层主要通过气凝胶加固保温隔热性能,气凝胶具有优异的防/隔热性能与耐环境稳定性,可承受1000℃以上的高温。相变材料层利用熔化和凝固过程吸收和释放潜热的原理进行温度维持,适用于月面温度周期性变化的环境。
2.2.7 防月尘设计
月尘具有粘附性、研磨性和渗透性等特点,可能会掩埋传感器节点,从而对其太阳能发电和通信等功能产生影响。因此传感器节点防月尘设计可有效降低月尘危害,如节点被掩埋造成通信不良,热控涂层被遮蔽造成散热功能异常等。
防月尘设计主要考虑以下2个方面:①应避免传感器节点被月尘掩埋,因此节点对月尘的压强应达到相应的标准,同时节点的质量应尽量小,且底部的面积应尽量大。为了满足上述要求,需将节点封装在一个半球形密封结构里。半球形具有重心低、底面积大的优点,能有效降低压强,使节点不会陷落在月尘里;而且由于月面重力场较弱,节点也不会翻倒。另外,密封设计隔离了节点与月尘的接触。②对探测器使用不粘材料进行封装。借鉴荷叶疏水原理,在其表面上增加具有小于月尘特征尺寸纹路的涂层,形成纳米级的针床,能够有效降低月尘颗粒与功能表面间的接触面积,减弱月尘对传感器表面的附着力,抑制月尘的附着。此外,还可以设置导电镀膜,即在功能表面镀一层超薄导电膜(如氧化铟锡膜)并接地,释放其表面月尘颗粒的电荷,从而减小月尘的静电附着力。
2.3 网络层
网络层实现数据传输的功能。建立适合于月表特殊环境下的无线网络架构是研究载人月表灵巧探测网络技术的前提和基础。首先对月表真空环境及探测需求进行分析,通过分析地面成熟且具有可扩展、可移动等优点的无线组网技术,提出面向月表特殊环境的高可靠月表灵巧探测网络(Reliable Lunar Smart-Sensor Network,R-LSN)架构,该网络架构创新性地提出集中式和分布式相结合的组网方式。
高可靠月表灵巧传感网络如图5所示,基于对月表特殊环境的分析,将其分为2类:适合直接部署移动式接入点(Mobile-AP,M-AP)及传感节点的类平原地区和不适合直接部署移动式接入点及传感节点的月表(如月坑)。结合这2类月表环境特点,重点探讨如何进行地形自适应地快速部署月表灵巧探测网络。

图5 高可靠月表灵巧传感网络示意图Fig.5 Diagram of the highly reliable dexterous sensor network on lunar surface
1)针对类平原地区,首先建立基于月表飞行器(月球车)的M-AP移动便捷部署方案。传感器节点根据其所在的范围,选择接入具体的M-AP。M-AP节点根据其所在位置选择直接接入月表骨干网络还是采用多跳方式通过其他M-AP接入月表骨干网络(如某个M-AP节点与月表骨干网络距离较远或者有月山/月坑等阻隔时)。
2)针对不适合直接部署M-AP的月坑/月山地区,月表灵巧探测网络通过自组织网络进行月坑/月山的探测,自组织网络内节点通过路由算法计算出汇聚节点(如边缘节点),坑内/山上的探测信息通过汇聚节点传输到月坑外的M-AP,MAP再接入到月表骨干网络。对于实在无法覆盖的巨大月坑,则采用坑周边多个M-AP的联合部署方式。
3)若月表骨干网支持,M-AP也可以直接与月球基地实现通信,兼容不同的体制与模式,以适应月表基础设施不同条件下的通信需求。
在可靠性方面,本文采用智能冗余备份的架构来提高月表灵巧探测网络的可靠性,冗余备份基站、冗余备份传感器节点保持睡眠状态,在网络能够正常工作时,不启动备份节点;当节点发生故障时,启动备份节点,从而实现网络可靠性。网络正常工作的节点具备可以接入备份移动式接入点的能力,同时备份移动式接入点也具备与正常工作基站及月表骨干网络通信的能力。
在低功耗方面,月表灵巧探测网络节点采用异步通信方式,当其要发送的数据准备完成后可立即通信,可以降低同步网络需要经常唤醒的功耗。
2.4 应用层
应用层是监控系统顶层处理逻辑的实现,是响应数据处理逻辑的最终单元。系统面向不同的物理监测量所采集的信息格式与处理流程各不相同,为保证各数据加工的独立性与安全性,在月球计算资源受限的环境下,应用层采用Docker容器技术封装各数据处理逻辑。Docker容器是一种轻量级内核虚拟化技术,可通过namespace和cgroups实现进程与资源的隔离。系统基于容器技术动态调节监测系统的处理逻辑规模,可有效提高天基资源利用率。
在应用层中,处理主要分为解析存储与异常响应两类。对月表温度、磁场、光照等监测对象,应用层解析其通过网络层传输回的数据,整理后统一记录于后端数据库,为载人探测与探月选址等提供分析数据。选用MySQL数据库对系统后台数据进行存储,因为MySQL的长连接方式能够有效保证数据的稳定传输。对于月震,太阳风等敏感检测量,应用层实时响应其动态变化,对采集的数据流作阈值分析,当数据大于临界值时,发出报警信息,并实时界面显示。
3 仿真实验与演示系统
为测试探测系统的覆盖性和可用性,搭建了演示系统对网络进行仿真,并测试其功能。
3.1 网络实验
3.1.1 数据来源
选用探月工程-数据发布与信息服务系统提供的嫦娥二号执行月球探测任务期间的科学探测数据作为仿真地理环境建模的数据来源。
利用ENVI软件对嫦娥二号探测数据进行读取分析得到月面各点的海拔情况。经过对月球DEM南半球图的大致分析,选取了面积为23 350 m×58 300 m,同时具有2个大型月坑与类平原地形的一块典型区域作为构建月面分布式探测网络的仿真场景。将M-AP节点和传感器节点的通信半径、部署间隔及漂移半径设定为固定值进行实验,如表1所示。

表1 实验参数Table 1 Experiment parameters /km
本文得到三维地形下的传感器、M-AP与簇头节点的三维分布与二维分布图,如图6、图7所示,其中黑色点为随机抛洒的传感器节点,红色点为随机抛洒的M-AP节点,橘色点为中继传感器节点。
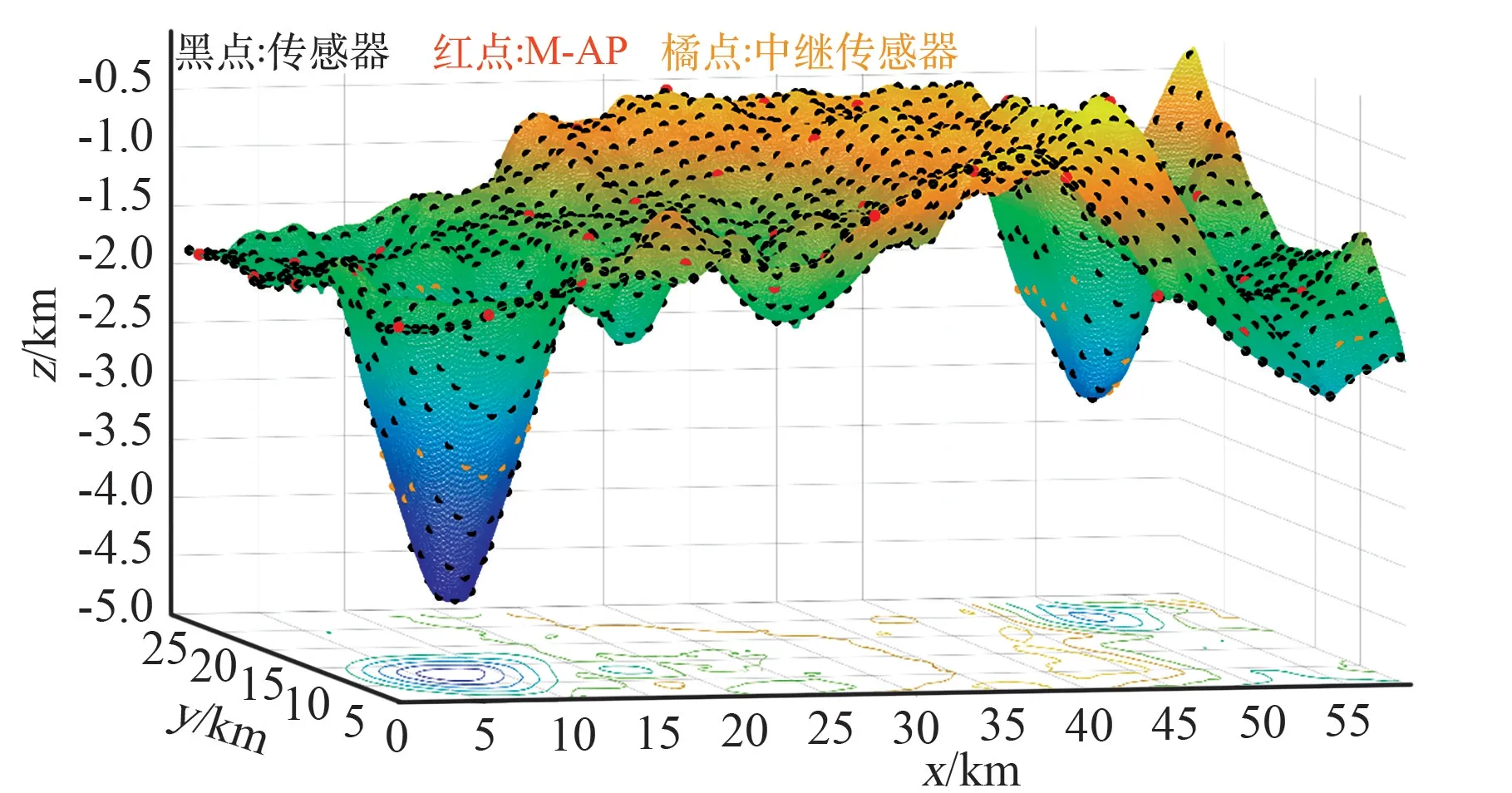
图6 月坑与类平原区域的传感器与M-AP的三维图Fig.6 Three-dimensional diagram of the sensors and M-AP in moon craters and p lain-like areas
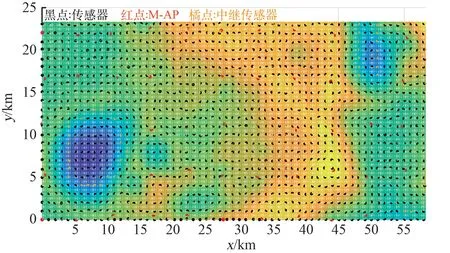
图7 月坑与类平原区域的传感器与M-AP的二维图Fig.7 Two-dimensional diagram of the sensors and M-AP in m oon craters and p lain-like areas

图8 月面传感器的有效工作距离Fig.8 Effective working distance of lunar surface sensor
3.1.2 传感器节点覆盖率
基于Matlab得到月面传感器有效工作距离的3D立体模型,如图8所示。根据每个节点周边传感器覆盖个数,可得传感器节点覆盖率。
依据传感器覆盖范围,对M-AP节点个数与覆盖传感器比例的关系进行仿真,M-AP节点个数与覆盖率关系曲线如图9所示。仿真结果表明,当M-AP节点数超过46时,覆盖率能够达到100%,总趋势呈大致线性上升。

图9 M-AP节点个数与覆盖率关系曲线Fig.9 Relationship curve between the num ber of MAP nodes and coverage
3.2 演示系统
地面演示验证系统架构如图10所示。探测节点集成后如图11所示,形成以树莓派为处理单元,集成数据采集与传输功能的探测器节点。探测器节点用于接收传感器监测的数据,探测器节点收集数据后通过LoRa局域网传输至簇头节点,簇头节点汇聚各探测器节点传感器数据,并将这些数据通过LoRa送至网关节点。网关节点通过Socket将数据发送至PC端。PC将数据存储到数据库,通过演示节点展示给用户。
为了验证当前地面演示验证系统是否能正常工作,测试并获取了空气温湿度、土壤湿度、光照强度、振动频率等数据,测试记录如表2所示。其中空气温湿度,土壤湿度测量均正确。期间通过改变传感器明暗程度收到了相应光照强度测量值。此外,实验中使用振动传感器,通过连续一段时间的检测给出此时振动概率。时间戳即为记录数据获取时间。这里基于实验室的环境,先将每台机器时间同步,检测当前地面演示验证系统从采集数据到PC端成功接收数据的时延、成功次数,并在不同的距离下进行了测试,5 min内的数据统计如表3所示。结果表明该演示系统在一定距离内的传输性能波动不大,较为稳定。
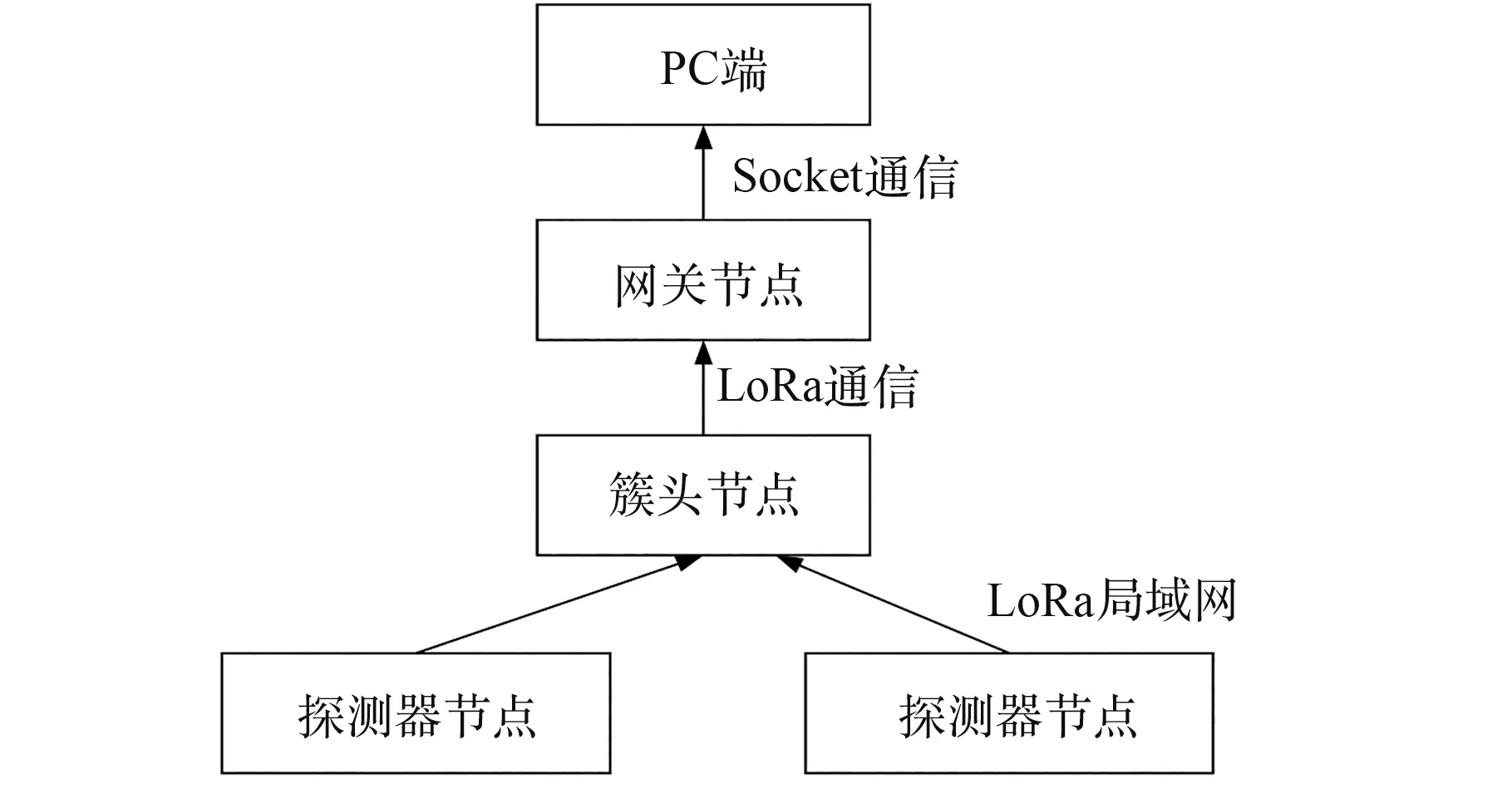
图10 地面演示验证系统Fig.10 Ground demonstration and verification system

图11 传感器、LoRa通信及汇聚处理实物图Fig.11 Photos of sensor,LoRa communication and convergence processing

表2 环境数据测试记录表Table 2 Test recording table of environm ental data

表3 传输时延统计结果Table 3 Statistics of transm ission delay
4 结论
针对月表高真空、强辐射、昼夜温差大等特性,本文设计了月面分布式组网及激光回传网络架构,提出了一种基于无线传感网络的物理、网络、应用3层结构组成的月面灵巧探测系统。该系统以低功耗探测器为节点,构建月面探测网络系统,通过Docker容器技术封装上层信息处理流程,实现数据实时处理。仿真实验结果表明:该探测系统可有效覆盖月面探测区域,并正确响应数据检测流程。
月面分布式组网探测是站点式、巡游式探测的有效补充,可以大大提高探测效率与覆盖率,本文提出的基于无线传感网络的组网方案,经仿真验证具有良好的效果,为月面探测提供了可借鉴的技术路线。面向未来的月面应用,还需不断关注高可靠、低功耗的探测节点设计以及弹性灵活抗毁的月面分布式组网技术研究,为后续工程实施奠定基础。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
军事文摘(2022年12期)2022-07-13 03:11:44
飞碟探索(2022年1期)2022-03-12 14:11:20
军事文摘(2021年18期)2021-12-02 01:28:54
电子制作(2018年23期)2018-12-26 01:01:26
太空探索(2015年1期)2015-07-18 11:02:13
少儿科学周刊·儿童版(2015年3期)2015-06-17 04:01:41
太空探索(2014年12期)2014-07-12 15:17:12
太空探索(2014年11期)2014-07-12 15:17:00