
Distributed Fault-Tolerant Containment Control for Nonlinear Multi-Agent Systems Under Directed Network Topology via Hierarchical Approach
2021-04-13 10:47ShuyiXiaoandJiuxiangDongMemberIEEE
Shuyi Xiao and Jiuxiang Dong, Member, IEEE
Abstract—This paper investigates the distributed fault-tolerant containment control (FTCC) problem of nonlinear multi-agent systems (MASs) under a directed network topology. The proposed control framework which is independent on the global information about the communication topology consists of two layers. Different from most existing distributed fault-tolerant control (FTC) protocols where the fault in one agent may propagate over network, the developed control method can eliminate the phenomenon of fault propagation. Based on the hierarchical control strategy, the FTCC problem with a directed graph can be simplified to the distributed containment control of the upper layer and the fault-tolerant tracking control of the lower layer. Finally, simulation results are given to demonstrate the effectiveness of the proposed control protocol.
I. INTRODUCTION
OVER the past few decades, the distributed control of multi-agent systems (MASs) has been an important topic in the field of control systems, due to its potential applications in many areas [1]−[8]. In general, the distributed control can be divided into leaderless consensus, leader-following consensus and containment control. Among them, the containment control attracts more and more considerable attention, which drives follower agents into the convex hull spanned by a group of leaders.
Containment control is widely used in practice. For example, in a ground-air cooperative combat mission with vehicles and aircraft, in the face of dangerous environment,we need to assign some vehicles/aircraft with advanced sensors and actuators as leaders and drive the remaining vehicles/aircraft into the safety convex hull composed by leaders. Some important progresses for containment control have been developed in the past several decades. In [9], an adaptive containment control scheme is developed for networked Lagrangian systems by using distributed slidingmodel estimators. By virtue of the power integrator technique and the homogeneous control method, a distributed finite-time control protocol is proposed for double-integrator multi-agent systems (MASs) [10]. In [11], distributed dynamic containment control methods are proposed. Unlike the works in [11] where the control inputs of leaders are zero, Li et al.[12] solved the containment control problem when the leader’s inputs are nonzero. In [13], some novel containment methods are developed. For networked autonomous underwater vehicles, the containment controller is designed predicate on predictor-based neural dynamic surface approach [14]. In[15], the containment control task under time-delay directed topology is accomplished by introducing distributed observers and the matrix transformation method. For a class of fractional-order MASs, the containment control protocol is developed in [16]. By designing the new reduced order dynamic gain observer, the distributed containment control method is proposed for high-order nonlinear MASs in [17].By using multiple barrier Lyapunov functions, the containment control with full state constraints for nonlinear strict-feedback system is investigated [18]. In order to achieve containment task within the prespecified time, a novel containment prescribed-time control algorithm is designed[19]. In [20], [21], the problem of output containment control of general linear system is addressed. For more complex task,such as formation containment control, a novel formationcontainment control scheme for multiple multirotor unmanned aerial vehicle (UAV) is developed [22].
The aforementioned work mainly focuses on the containment control problems of MASs in the absence of system faults. However, system failures are often inevitable of practical systems from practical perspectives [23]−[30]; the resulting controllers for normal working case might not guarantee the performance, even stability of MASs with faults. In recent years, some fault-tolerant containment control(FTCC) approaches for MASs with system faults have been developed. In [31], a new FTCC protocol is developed for MASs with non-identical nonlinear functions by using fuzzy phenomenon of fault propagation is eliminated. As a comparison, according to Figs. 5 and 6, Figs. 10 and 11, we can see that the FTCC problem can not be solved by the control scheme developed in [11]. In addition, the fault in one agent cause the chain reaction.






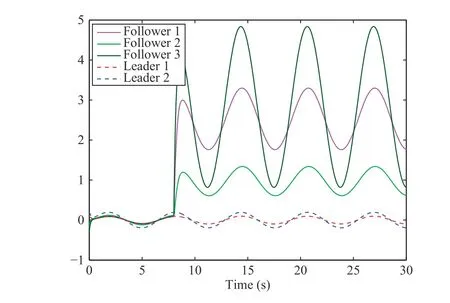
Fig.6. The curves of x12– x32 and φ 42– φ52 using the method in [11] (Case 1).

Fig.7. The curves of x11 – x31 and φ 41– φ51 (Case 2).

Fig.8. The curves of x12 – x32 and φ 42– φ52 (Case 2).
B. Example 2
In this subsection, we consider four followers and two leaders as shown in Fig.12. Agents 1–4 are followers, and Agents 5 and 6 are leaders. The B747-100/200 aircraft model borrowed from [48] is considered. The dynamics of followers and leaders are given as follows:

Fig.9. The curves of the containment error (Case 2).
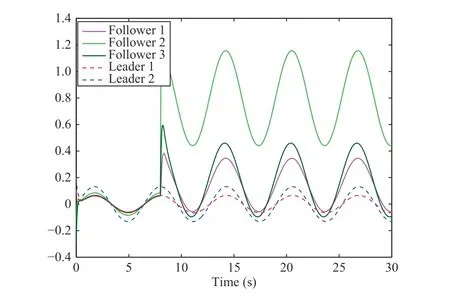
Fig.10. The curves of x 11– x31 and φ 41– φ51 using the method in [11] (Case 2).

Fig.11. The curves of x 12– x32 and φ 42– φ52 using the method in [11] (Case 2).

Fig.12. Network topology G 2.
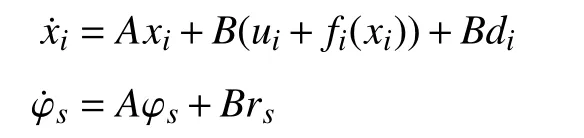
where


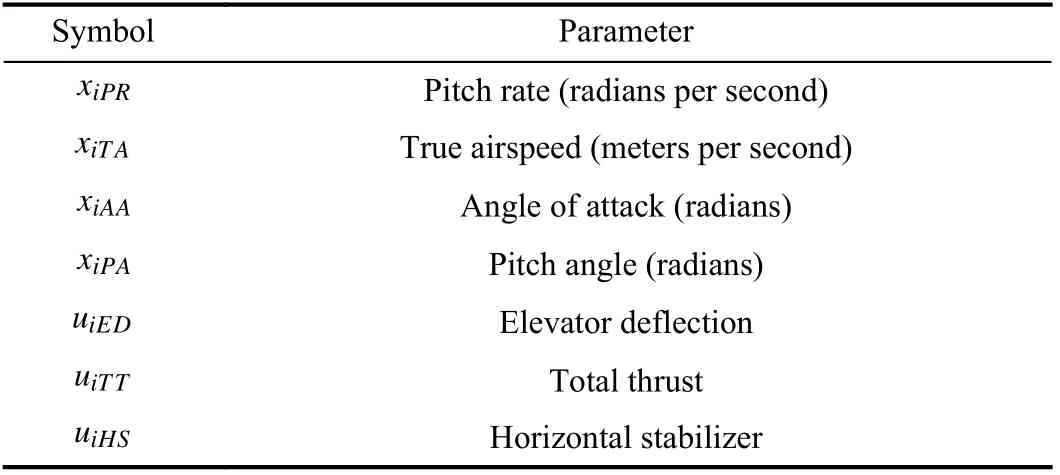
TABLE I B747-100/200 AIRCRAFT MODEL PARAMETERS
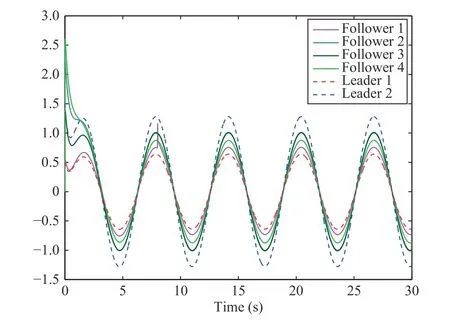
Fig.13. The curves of x11– x41 and φ 51– φ61.
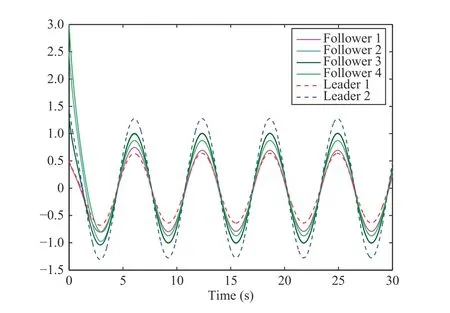
Fig.14. The curves of x12– x42 and φ 52– φ62.

Fig.15. The curves of x13– x43 and φ 53– φ63.
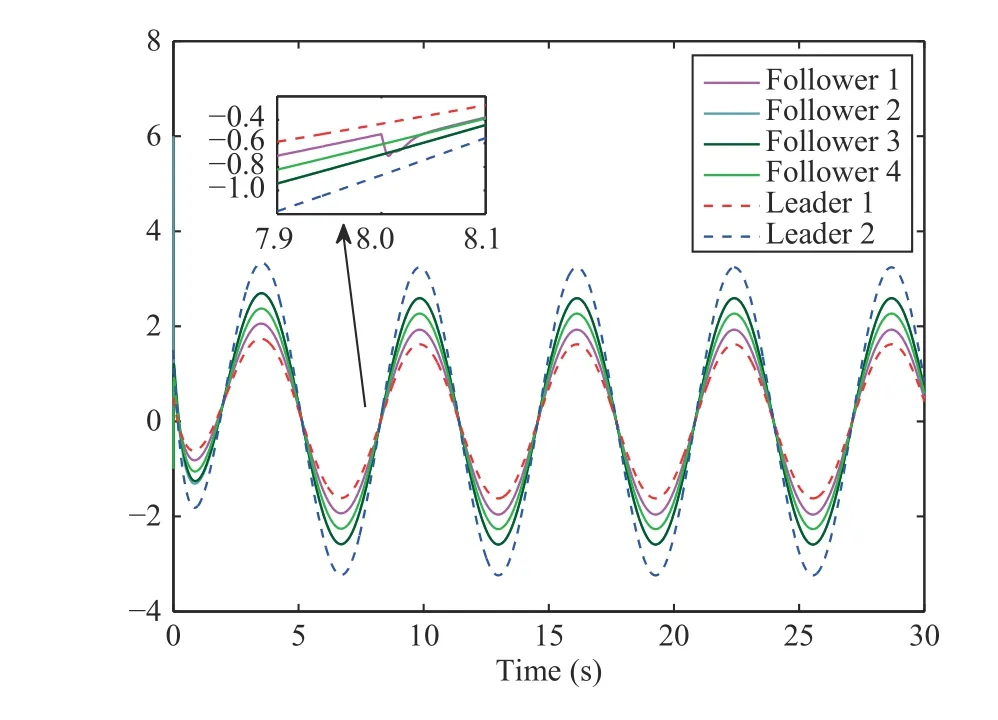
Fig.16. The curves of x14– x44 and φ 54– φ64.
V. CONCLUSIONS
In this paper, a hierarchical FTCC strategy is proposed for nonlinear MASs under a directed graph. By introducing the hierarchical approach, the FTCC problem with directed graphs can be simplified into the distributed containment control of the upper layer and the fault-tolerant tracking control of the lower layer. It is shown that the distributed FTCC task is accomplished while the occurrence of fault propagation is avoided. Finally, simulation results are introduced to demonstrate the effectiveness of the proposed controlprotocol. In the future, we will investigate the issue of distributed FTCC with time-varying network topologies under the framework of hierarchical control.
 IEEE/CAA Journal of Automatica Sinica2021年4期
IEEE/CAA Journal of Automatica Sinica2021年4期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Dynamic Evaluation Strategies for Multiple Aircrafts Formation Using Collision and Matching Probabilities
- Task Scheduling for Multi-Cloud Computing Subject to Security and Reliability Constraints
- Vibration Control of a High-Rise Building Structure: Theory and Experiment
- Residual-driven Fuzzy C-Means Clustering for Image Segmentation
- Decoupling Adaptive Sliding Mode Observer Design for Wind Turbines Subject to Simultaneous Faults in Sensors and Actuators
- Property Preservation of Petri Synthesis Net Based Representation for Embedded Systems