一种新型肌腱-连杆双模态灵巧手指的设计与分析*
2021-04-13 03:06:36方开心石萍汪志航王晴晴喻洪流
生物医学工程研究 2021年1期
方开心,石萍,汪志航,王晴晴,喻洪流
(上海理工大学康复工程与技术研究所,上海 200093)
1 引 言
手的高度灵活性使人们能够完成各种复杂的动作,其功能的缺失给患者带来诸多不便。为提高截肢患者的生活质量,国内外一直致力于研究仿生手的机械设计[1-3]。国外的典型代表为Michelangelo、i-Limb、Bebionic假手[4]。Michelangdlo假手使用两个肌电传感器捕获前臂肌电信号进行假手控制,特殊的手指对齐方式配合拇指能实现七种抓握模式,腕部屈伸功能可锁定在八个不同位置角度[5];i-Limb假手使用两个电极进行控制信号的采集,每个手指由驱动器进行控制,可实现五指单独的屈曲伸展运动[6];Bebionic假手中采用直流电机丝杆并结合连杆实现四指的传动控制,拇指采用电机齿轮传动实现假手6自由度11关节的运动[7]。上海交通大学研制的一种五指仿生假手采用连续体差速机构,可实现简单的手指弯曲伸展以及联合运动[8],华中科技大学采用欠驱动方式,使用4个电机控制五根手指完成简单的抓握功能[9],哈尔滨工业大学研制了四代假手[10-11],其中的第三代假手采用欠驱动连杆传动方式,具备大拇指和食指的自适应抓取功能,第四代假手的手指可进行单独驱动并使用特殊的连杆机构实现五指的耦合运动。
上述仿生假手能够实现手部的抓握功能,但均未充分考虑设计手指的内收外展功能,且刚性结构造成假手柔顺性不足[12]。本研究依照仿生学并结合人手特点,设计了一种新型欠驱动仿生灵巧手,它不仅能实现常规的包络抓取,而且能够实现指尖抓取和指侧间抓取,具有高度的仿生性以及灵活性。该仿生手的手指结构采用单驱动方式实现手指的掌指关节、中指关节和远指关节的耦合运动,与传统电机加连杆、电机加齿轮传动方式不同,本研究设计的仿生手采用舵机加腱绳和连杆双模态传动方式,使结构设计得更加紧凑。
2 手指结构设计
本研究基于仿生学理念,参照人手国标尺寸设计了手指结构,包括食指、中指、无名指、小指和拇指。每个手指均由舵机加腱绳进行单独驱动,实现其屈曲伸展运动;在四指的掌指关节处采用欠驱动原理创新性设计了一种四连杆机构,由一个舵机驱动,可实现仿生手四指的内收外展功能。整体具有高度的仿生性和灵活性。
2.1 屈曲伸展结构设计
手指的外形是参照人手的结构参数进行设计,五指的传动方式均由舵机加腱绳进行控制。本研究以食指的相关结构为例,见图1。为降低控制的复杂性,假手的近指关节(PIP)、远指关节(DIP)和掌骨关节(MCP)设计成耦合运动,为增加手指的灵活性,在手指的每个掌指关节处增加了内收外展的自由度,单个手指总共具有4个自由度,可联合实现包络抓取,指尖抓取和指侧间抓取功能。
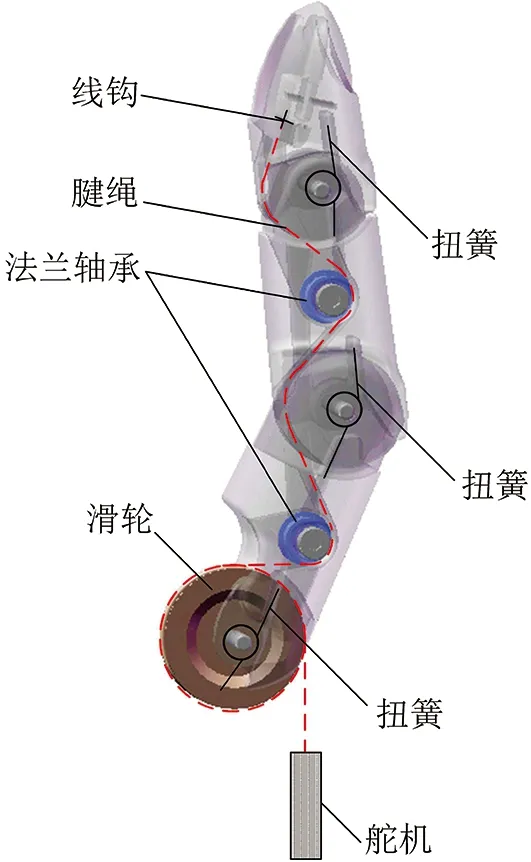
图1 食指结构Fig.1 The structure of the index finger
由肌腱传动原则,仿生手的四指利用腱绳和滑轮完成相互运动间的传递。在DIP和PIP处设计有微型法兰轴承,在MCP处设计有滑轮,每个手指由3个部件组成,每个部件内部均设计有线道,手指指尖均设计有线钩,腱绳通过线道在法兰轴承和滑轮之间进行摆布并缠绕在线钩上。DIP、PIP和MCP关节处均安装有扭簧用于实现各关节的屈曲和伸展动作,单个手指是由一个舵机驱动PIP,并同时带动DIP和MCP的串联机构。
2.2 内收外展结构设计
人手的真实活动中,每根手指均可进行单独的内收外展运动,但在抓取物体时,五根手指会以一定的协同运动[13]形成特定的抓取姿势,而非单独运动。本研究中四连杆机构采用欠驱动设计理念,使用一个舵机使仿生手四指同时做内收外展运动,其运动简图见图2。
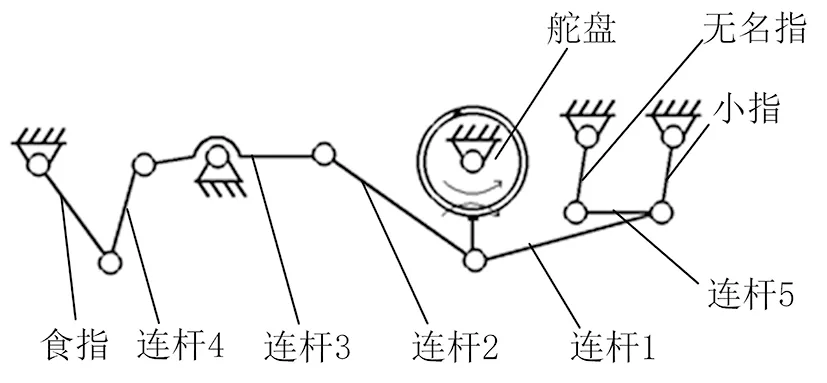
图2 运动简图Fig.2 The diagram of the movement
驱动舵机固定在手掌内盖上,舵盘与舵机上的齿轮固连,舵盘、连杆1、连杆2、连杆3之间铰接,其中连杆3与手掌内盖铰接,以维持整个连杆的相对位置;连杆1的另一端与小指掌骨关节铰接,连杆4的两端分别于连杆3和食指的掌骨关节铰接,通过驱动舵机可带动食指和小指产生相对转动;连杆5的两端与小指和无名指的掌骨关节铰接,可通过小指掌骨关节的转动带动无名指掌骨关节的转动。
3 结构建模及运动学分析
为简化仿生手的运动学分析,本研究提出了一种分离合成式机器人运动学分析方法,即对仿生手的屈曲伸展运动和内收外展运动进行单独分析,其最终运动轨迹应是两种运动分析结果的合成。
3.1 结构建模及参数设计
为了给假手零件开发和运动学分析作基础,本研究建立了手部结构的三维模型,见图1、图3。
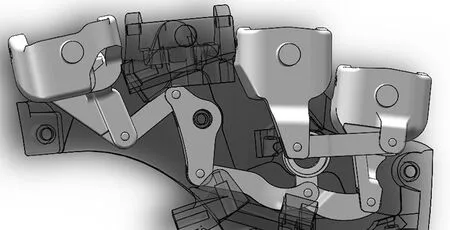
图3 四连杆三维模型Fig.3 3D model of the four-link
手指各参数按中国成年人人体尺寸标准设计,手指各关节弯曲角度在80°~100°[14],以食指为例,其结构参数见表1。
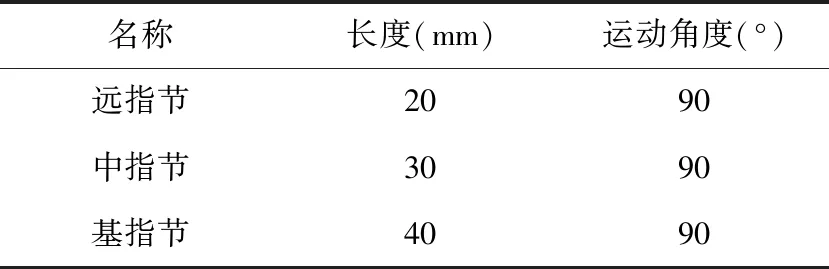
表1 食指参数Table 1 The parameters of the index finger
手指内收外展的角度范围一般在30°~40°之间,根据此范围进行四连杆尺寸的设计见表2。

表2 连杆尺寸参数Table 2 The parameters of the four-link
3.2 屈曲伸展运动学分析
D-H表示法是机器人运动学分析中比较常用的方法,其可以分析出关节活动角度与末端执行器之间的关系。手指整体是一个串联结构,采用D-H建模分析方法可以求出每个手指指尖相对于掌指关节基坐标系的空间位姿关系[15],本研究以食指为例进行分析,建立其D-H坐标系,见图4(图中z轴均垂直纸面向外)。
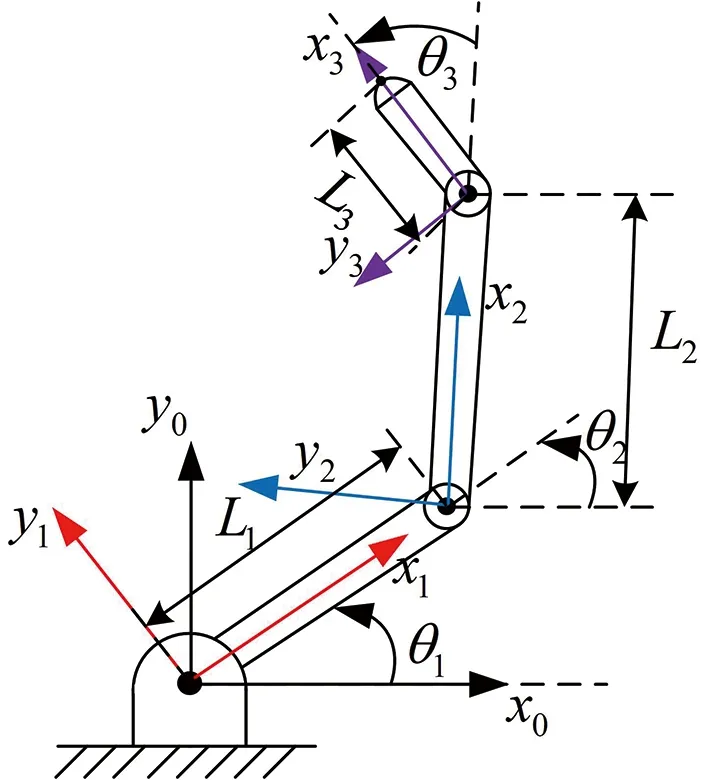
图4 食指D-H坐标系Fig.4 D-H coordinate system of index finger
可采用D-H坐标法中的坐标系链式法则可知其基础变换方程为:
Rot(z,θi)Trans(0,0,di-1)
(1)

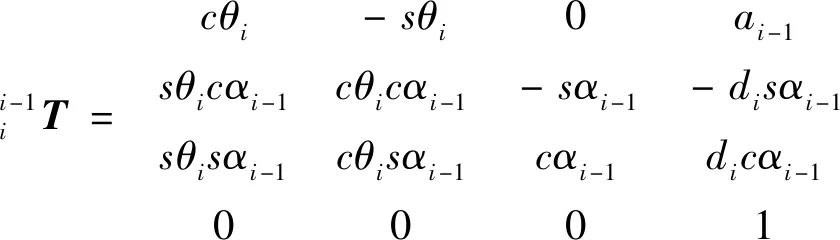
(2)
式中,cθi表示cos(θi),sθi表示sin(θi),cαi-1表示cos(αi-1),sαi-1表示sin(αi-1)。
根据式(2)和表3所示连杆参数,可求得各连杆变换矩阵如下:
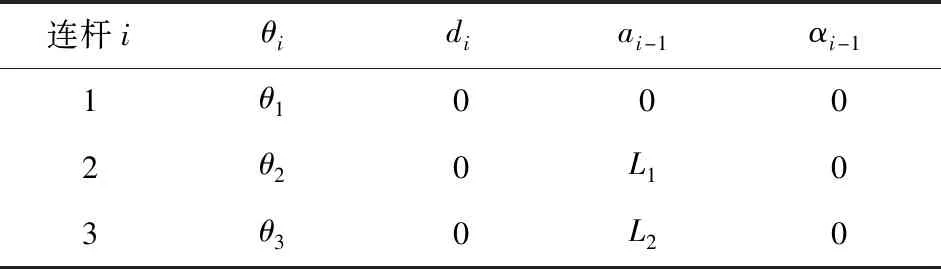
表3 D-H参数表Table 3 The parameters table of D-H
各连杆变换矩阵相乘,可得仿生手指的变换矩阵:
(3)
假设远指关节相对基坐标系的矩阵为:

联立上式可求出仿生手远指关节的运动学基本方程:
(4)
3.3 内收外展运动学分析
本结构中每根手指的内收外展运动均采用连杆进行传动,其运动学分析方法都是相似的,为避免繁琐,本次运动学分析仅对食指进行较详细的描述,其它手指采用食指的分析方法均可实现运动学的探索,运用解析法[16]建立其运动学模型,见图5。
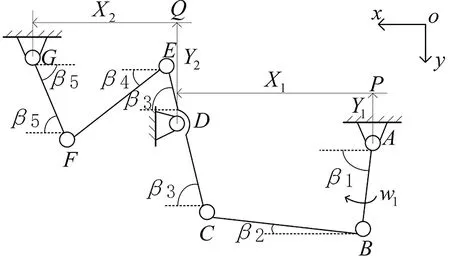
图5 内收外展原理Fig.5 Principle of adduction and abduction
图5中X1、Y1、X2、Y2分别是AD两点水平距离、AD两点垂直距离、DG两点水平距离、DG两点垂直距离。图5中各参数含义见表5。
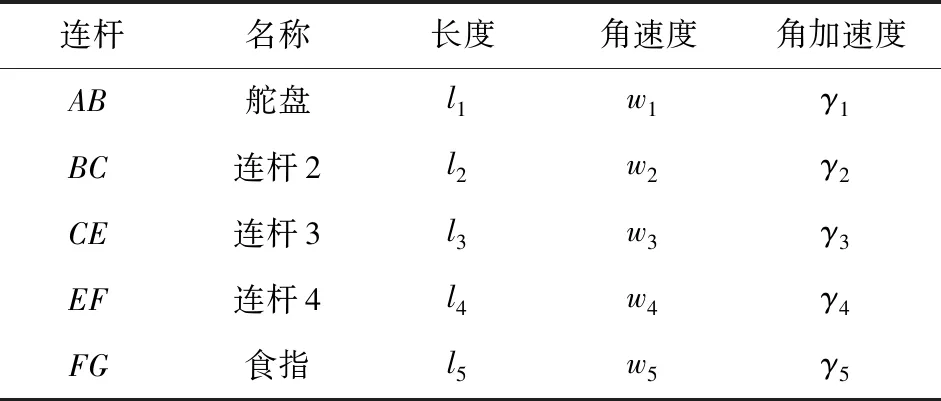
表5 连杆参数含义Table 5 Connecting rod parameter meaning
食指运动简图为一个平面五杆的运动简图,通过舵盘AB的顺时针或逆时针旋转,经其他杆件传递动力,实现食指GF的内收外展功能。根据解析法可知,杆AB、BC、CD、DP构成一个封闭的矢量多边形ABCDPA;杆DE、EF、FG、GD构成矢量多边形DEFGQ。其矢量表达式如下,并将其按复数矢量法展开:
在ABCDPA中有:
l1+l2+l3=Y1+X1
(5)
即:

(6)
在DEFGQ中有:
l4+l5+l6=Y2+X2
(7)
即:
(8)
联立上式,即得连杆的位移公式:

(9)
即可求得:
(10)
式中,η=X1-l1cosβ1,ξ=Y1+l1sinβ1,λ=X2-l4cosβ3,τ=Y2+l4sinβ3。
根据式(10)对时间t进行一次和两次求导,即可分别得出手指运动的角速度和角速度的表达式。
4 仿真与验证
在理论上经过上述对仿生手相关机械结构的运动分析之后,为验证所分析模型的合理性,本研究使用ADAMS对仿生手食指结构进行了运动学仿真分析,获得各关节运动角度范围,然后将其代入上述分析公式并利用MATLAB编程对上述所建立的食指运动学模型进行拟合,最后与ADAMS分析结果做对比验证其合理性。
根据表1、表2和食指运动学理论模型,使用ADAMS进行运动仿真。仿真时忽略各关节之间的摩擦效应,并在舵盘处和对应关节处施加驱动,建立的屈曲伸展仿真模型和内收外展仿真模型见图6、图7。
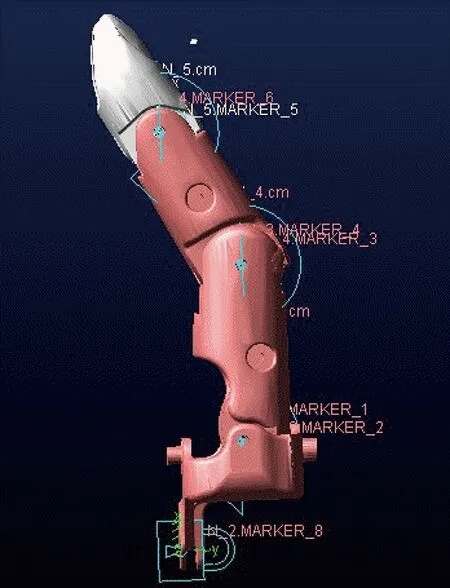
图6 屈曲伸展仿真Fig.6 Simulation of flexion and extension
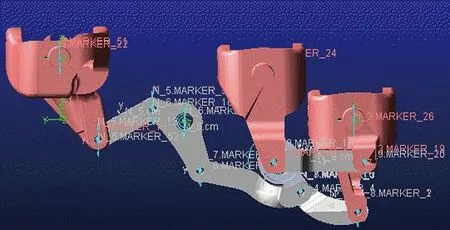
图7 内收外展仿真Fig.7 Simulation of adduction and stretch
同时利用MATLAB进行理论求解,其仿真结果以及理论计算结果见图8、图9。
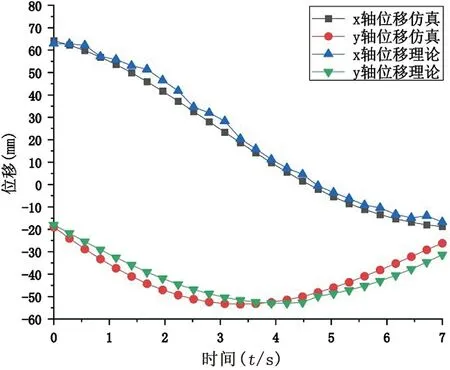
图8 屈曲伸展分析Fig.8 The analysis of flexion and extension
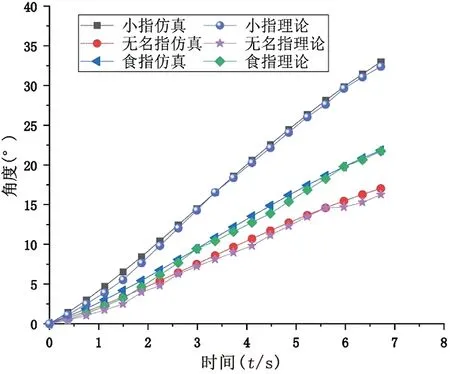
图9 内收外展分析Fig.9 The analysis of adduction and stretch
由图8可知,不管是在ADAMS中还是在MATLAB中,仿生手食指的屈曲伸展运动仿真曲线和与其相对应的理论曲线基本保持一致,验证了本研究所建立仿生手运动模型的准确性与合理性。由图9可知,内收外展运动的仿真曲线和理论拟合曲线基本一致。同时,本研究所设计仿生手内收外展四连杆机构能使四指打开角度的运动范围,见表6,可知其符合真实人手的运动情况。

表6 运动范围Table 6 Range of motion
其中,λ1是小指转动角度范围,λ2是食指转动角度范围,λ3是无名指转动角度范围。
在ADAMS中对手指内收外展运动角速度和角加速度仿真分析,其运动曲线见图10、图11。
图10和图11的加速度和角加速度曲线均为平滑曲线,并未出现太多波动点,验证了本研究所设计内收外展结构的运动角度随时间的变化是比较稳定的。
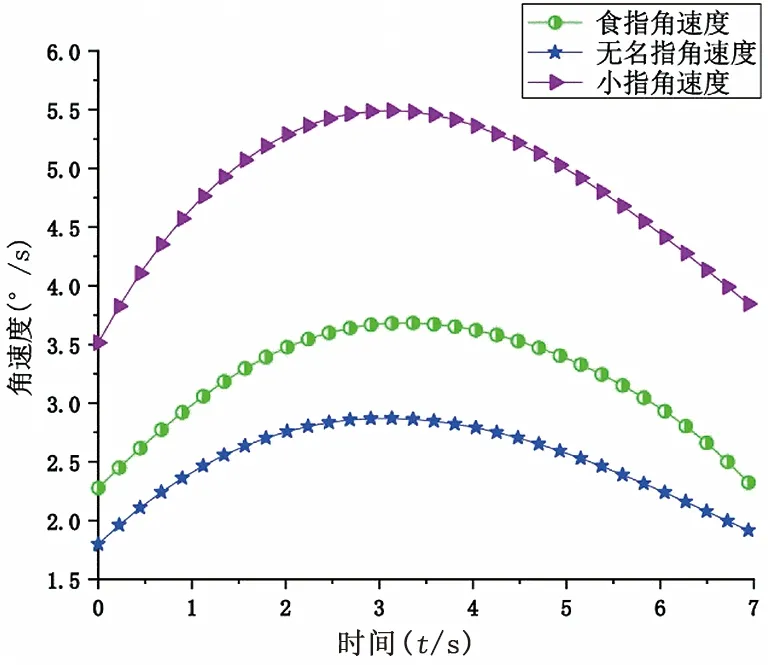
图10 角速度分析Fig.10 The analysis of angular velocity
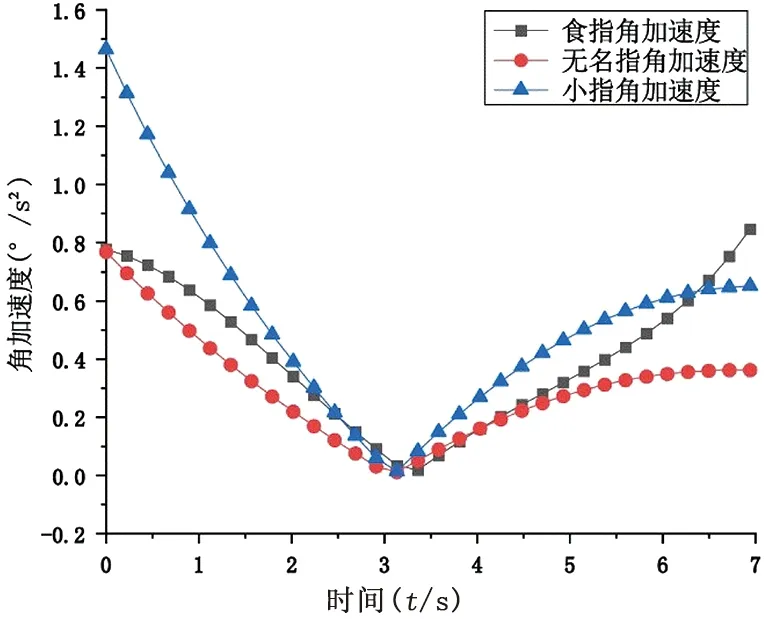
图11 角加速度分析Fig.11 The analysis of angular acceleration
5 结论
为解决目前仿生手结构复杂、功能单一的问题,本研究在传统连杆和腱绳的单一传动模式基础上,提出了一种连杆腱绳双模态驱动方案。在进行了理论分析、结构设计和仿真分析后得出如下结论:(1)实现了整体结构设计的轻量化和紧凑化,与传统智能仿生手单一驱动方式相比,本研究结合了连杆传动和腱绳传动,充分利用了手掌的狭小空间,结构紧凑。假手整体主要部件采用高韧性树脂3D打印制成,仅为336.5 g。(2)解决了现有仿生手内收外展功能尚未充分实现的问题。并通过仿真分析了食指、无名指和小指内收外展的运动角度范围分别在0~25°、0~15°和0~35°。基于传统的运动学分析方式,本研究提出了一种分离合成式运动学分析方法,简化了分析步骤,并通过仿真验证了其可行性。
猜你喜欢
健康体检与管理(2022年4期)2022-05-13 14:57:17
中国典型病例大全(2022年9期)2022-04-19 22:12:45
中华肩肘外科电子杂志(2019年4期)2019-08-24 06:38:44
作文中学版(2018年4期)2018-11-28 15:19:01
小学阅读指南·低年级版(2015年12期)2015-12-11 14:48:53
实用手外科杂志(2015年4期)2015-08-27 01:54:12
实用手外科杂志(2015年3期)2015-08-27 01:53:24
健康博览(2015年4期)2015-07-07 09:56:06
中学数学杂志(2014年5期)2014-03-01 03:48:14
知识窗(2012年1期)2012-06-27 05:32:36