高覆盖率电成像测井仪推靠器的研制*
2021-04-13 08:16廖胜军窦锦爱王芝江刘耀伟于增辉侯洪为
石油管材与仪器 2021年1期
王 蕙,廖胜军,窦锦爱,王芝江,刘耀伟,于增辉,侯洪为
(中海油田服务股份有限公司 河北 廊坊 065201)
0 引 言
随着油气勘探工作的不断加深,寻找优质油气藏的难度日益增大,同时复杂的地质形态对测井仪器的集成性、阵列性等要求也越来越高,各种各样的储层特征也给测井装备带来一个个全新的挑战。对井壁成像仪器来说,覆盖率的高低直接影响到对地层信息采集的多少。覆盖率越高,获取的信息也就相应越详尽。目前,我国电成像仪器的最高覆盖率为85%(8.5 in井眼中),这就意味着在8.5 in(1 in=25.4 mm)井眼中还有15%的信息无法被采集。因此,开展提高电成像仪器覆盖率的研究非常必要。
本文旨在介绍最新研制的一种适用于6.5~21 in井眼的电成像测井装备——高覆盖率推靠器的研制方法。
1 测量原理
电成像测井是一种井壁电成像测井技术,这项技术以倾角测井技术为基础,基于电法测井的基本原理——“欧姆定律”发展而来[1-2]。电成像测井仪由绝缘节、电路节以及推靠器3个部分组成。推靠器上搭载有探头(极板),是直接获取井壁信息的部分。
电成像测井仪的测量原理如图1所示。测井作业时,推靠臂张开,使得极板以一定大小的力与井壁贴靠,电源会在极板、被测井壁以及回流电极之间形成变化的电流,如图2所示。极板上搭载的电扣能够对井壁地层进行阵列扫描,从而采集得到沿井眼周向与纵向的地层电阻率信息[3]。通过软件对电扣上电流采集和处理,可以生成彩色或灰度等级的二维视电阻率图像,浅色代表高电阻率,深色代表低电阻率[4]。
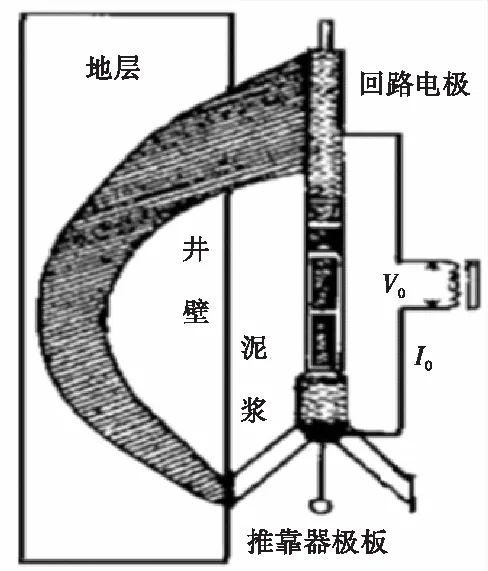
图1 电成像测井仪测量原理图

图2 电成像测井仪测量电流路径图
2 推靠器机械设计
2.1 主体结构的设计
2.1.1 主体外型结构
高覆盖率推靠器为十二臂推靠结构,如图3所示。

图3 高覆盖率推靠器外型结构
由于所适应井眼大小的局限,12组推靠臂无法实现圆周均布,因此将12组推靠臂设计成上下两排,每排有6组推靠臂的阵列形式。其中,上排与下排推靠臂之间进行“插空”布置,同排间相邻两组推靠臂间夹角为60°;上下排间相邻两个推靠臂间夹角为30°,如图4所示。
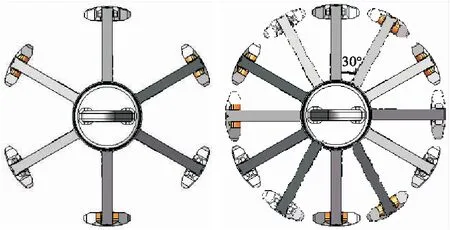
图4 同排间及上下排间相邻推靠臂位置俯视示意图
2.1.2 工作原理
如图5所示,推靠器由直流电机、扭矩限制器、联轴器、超越离合器、滚珠丝杠以及分动式推靠机构等部分组成。在推靠器内,除了各组推靠臂各搭载有一个井径电位器外,还安装有一只行程电位器,用来检测推靠臂开合时极板上的压力,以监控推靠臂的开合情况,同时也可以通过该数据来调节推靠力的大小,从而获得所需的清晰图像[5]。

图5 高覆盖率推靠器工作原理图
在接通直流电源后,电机正转,扭矩通过联轴器、扭矩限制器、传动轴、滚珠丝杠,旋转运动变为轴向直线运动,动力盘压缩弹簧总成,推动推靠臂向外打开从而使得极板贴靠井壁。反之,电机反转,传动机构反向运动,动力盘通过弹簧总成将推靠臂收回。超越离合器控制电机与滚珠丝杠的接合与脱开,以防止过大的外力损坏电机。
由于井径电位器、推力电位器以及轴承等部件需要浸在油液中才可以正常工作,推靠器中设计有用于调节仪器内部与外部之间压力的平衡部分,置于推靠器的下端。
2.2 分动式推靠机构的设计与计算
2.2.1 分动式推靠机构运动分析
高覆盖率推靠器采用分动式推靠机构,该机构形式要求每组运动机构都能独立进行动作,并保证各推靠臂能随井径的变化而开合[6]。其杆系工作原理如图6所示。主臂为主动件,副臂为从动件,极板为连杆,该结构相当于一个双曲柄机构。由于连杆(极板)与基体上的机架长度相同,其与基体部分组成只有一个自由度的平行四边形机构,这个机构使得在测井作业中极板能够与井壁有效贴合[5]。除平行四边形机构外,在该结构中顶杆、短连杆和OA杆三者构成了一个曲柄滑块机构。这两组机构的共同作用使推靠臂得以张开和收拢。
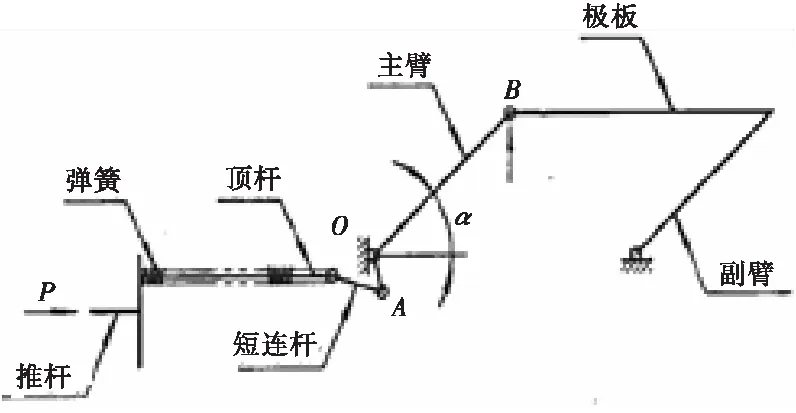
图6 杆系机构工作简图
上排推靠机构设计如图7所示,由上推力杆、上推力连接杆、上排主臂、上排副臂、上推力大弹簧、上推力小弹簧以及极板组成。上推力杆上装有上推力大弹簧和上推力小弹簧。弹簧与传动部分的动力盘相接触,动力盘通过压缩提供主动力的上推力大弹簧将运动传递至上推力杆,再通过上推力连接杆传递至上排主臂,从而实现上排推靠臂的开合动作。其中,上推力小弹簧为运动的启动和停止起缓冲作用。
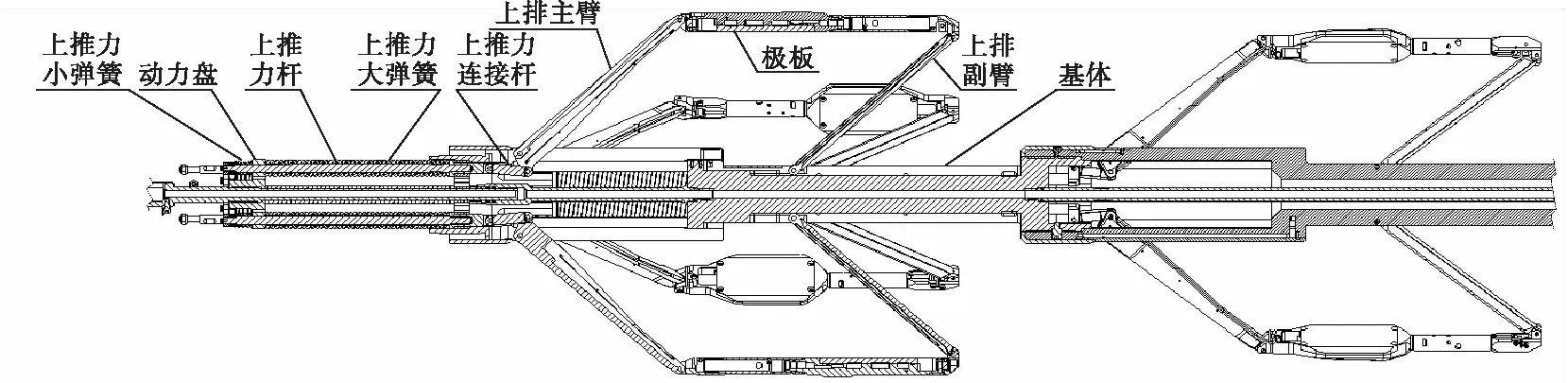
图7 上排推靠机构示意图
下排推靠机构设计与上排推靠机构相类似,如图8所示。其由下推力杆、下推力连接杆、下排主臂、下排副臂、下推力大弹簧、下推力小弹簧以及极板组成,推靠臂开合运动原理与上排推靠机构相同。

图8 下排推靠机构示意图
由于下推力杆的总长度超过1 m,过长的杆体使其与基体配合时的同轴度难以得到保证,因此该部分采用了三段式的设计。如图9所示,下推力杆由下推力杆上部、下推力杆中部和下推力杆下部组成,三部分依次相连。此外,下推力杆中部与下推力杆上部的连接端设计有一个凸台,在与基体配合的过程中可以起到限位的作用。

图9 下排推力杆示意图
2.2.2 弹簧的选择与计算
分动式推靠机构需要每组机构都能分别进行精确运动,选择合理的弹簧是每个运动臂能够灵活开合的根本[7]。高覆盖率推靠器较常规推靠器增加了6组推靠臂,仪器的总长有所增加,现场作业时过长的仪器在运输、装接时会引起诸多不便。使用一个暴露在泥浆中可以正常工作的弹簧代替原先需要置于油中的碟簧,能够很大程度减少平衡油液的使用量,使得平衡部分的尺寸得以大幅缩短。因此,具有特性线成线性、刚度稳定、结构简单、制造方便等特点的圆形截面圆柱螺旋压缩弹簧[8]是一个不错的选择。
经过试验和对比,弹簧的材料选取一种无磁的镍钴铬钼合金,常用于制造高精密弹簧的材料——MP35N。这种材料具有超高的抗拉强度、良好的延展性、韧性以及抗腐蚀性。此外,它还具有极好的耐硫化、耐高温氧化、耐氢脆、耐盐溶液(包括海水)和大多数无机酸腐蚀的性能[9]。使用该材料制造的弹簧能够在水基、油基泥浆等推靠器所处的各种极限工况下正常工作。
弹簧外形如图10所示。
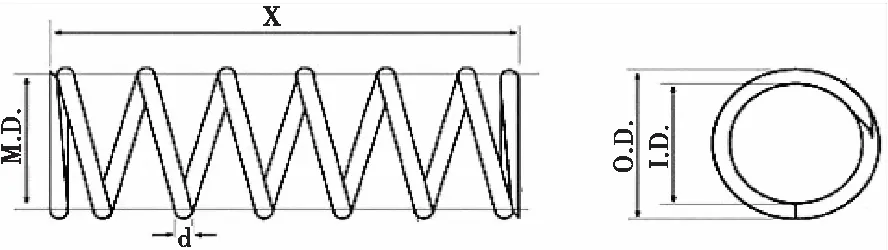
图10 弹簧外形示意图
根据推靠力和仪器内径可对弹簧的参数进行计算。胡克的弹性定律指出:在弹性限度内,弹簧的弹力F和弹簧的长度x成正比,即
F=-kx
(1)
压缩弹簧的设计,除弹簧的外形尺寸外,还需要计算出最大负荷及变位尺寸的负荷,也就是需要计算出弹簧常数k,即
k=(G×d4)/(8×Dm3×Nc)
(2)
式(2)中,G为材料的切变模量(MP35N的切变模量为78.5 kN/mm2);d为线径;Do为外径(O.D.);Di为内径(I.D.);Dm为中径(M.D.=Do-d);Nc为有效圈数。
根据仪器内部空间以及力学要求,设计弹簧线径为5 mm,中径为19.2 mm,有效圈数为40圈。由(2)式计算的弹簧刚度k=31.715 N/mm。
2.2.3 推靠机构受力情况及力学计算
推靠机构杆系受力情况如图11所示。

图11 杆系受力情况示意图
设弹簧在推靠臂完全收起时的预压缩量为x1,动力盘的运动距离为S,推力杆着力点的运动距离为S1。那么,推靠臂从收起到张开的过程中弹簧的变形量为:
Δx=S-S1
(3)
此时,弹簧的总变形量为:
x=x1+Δx
(4)
在推靠臂为α角时有一个xmin,当推靠臂完全收起时,α=0°
xmax=xmin+S1
(5)
根据式(1)可计算出弹簧在变形量最大时的弹簧力Fmax。根据仪器指标中对推靠臂张开的最大尺寸的要求,可计算出弹簧变形量最小时的弹簧力Fmin。
由图11的杆系受力情况可知,杆系参数α+β,αmax及FA(FA=F弹簧力),设lOB∶lOA=c,则极板力为:
(6)
根据式(2)计算的弹簧刚度k=31.715 N/mm,仪器开腿时,弹簧预压缩量为41.5 mm,根据式(1)可得,F弹簧力=1 316.18 N。
图12为推靠器开腿至8.5 in井径时的位置情况。此时,α=6°,β=105°,lOB=306 mm,lOA=29.5 mm,根据式(6)可得,极板力FT=121.88 N。

图12 8.5 in井眼中推靠臂位置情况
在开腿至井眼大小后,弹簧还设计有3.5 mm的加力行程,此时弹簧的压缩量最大可为45 mm。此时,根据式(1)可得,F弹簧力=1 427.18 N。再次根据式(6)可得,极板力FT=132.16 N。
可见,极板力可在121.88~132.16 N之间进行调整,从而根据实际情况来调整极板与井壁之间的贴靠效果。
2.2.4 覆盖率的计算
推靠器的覆盖率是根据推靠器极板上搭载的电极数来计算的。电极外形如图13所示,电极尺寸见图14。每个测量电极上有25个小的电扣,最左侧电扣和最右侧电扣绝缘层外侧间的夹角n为35.74°,曲率半径r为4.25 in。

图13 测量电极
弧长公式为:
l=n/180πr
(7)
由式(7)可得,每块极板在8.5 in井眼中所能够覆盖的弧长范围为2.65 in。
周长公式为:

图14 电极尺寸
L=πD
(8)
由式(8)可得,8.5 in井周周长为26.69 in。
覆盖率的计算公式为:
单个极板覆盖的弧长范围(l)×极板个数/井周周长(L)×100%
(9)
由式(9)可得, 12个极板在8.5 in井眼中覆盖率为119.2%,大于100%
至此可知,本文中所述高覆盖率推靠器可以在8.5 in井眼中达到全井眼覆盖。
同样,根据式(7)~(9)可计算出,该高覆盖率推靠器在12.25 in井眼中覆盖率达到89.4%。
2.3 平衡部分结构的设计
平衡部分如图15所示,其置于推靠器下部,用于维持推靠器内外压力平衡,由活塞杆、活塞、弹簧、下部转接头以及溢流阀组成。活塞杆与推靠器基体的中心管相连,管内的油液能够通过活塞杆上的开孔进行流动。活塞外部有泥浆压力时,泥浆推动活塞上移,直至压力平衡;推靠器内部油液在高温下膨胀时,管内油液通过活塞杆上的开孔进入活塞上方,推动活塞下移,直至压力平衡。

图15 平衡部分示意图
3 结束语
本文所述高覆盖率推靠器采用由平行四边形机构和曲柄滑块机构共同组成的推靠式分动机构。该机构中使用MP35N制成的圆柱螺旋弹簧在保证可靠传动和适宜极板力的同时,有效地控制了仪器的长度。
该高覆盖率推靠器在8.5 in的井眼中可实现100%的覆盖,在12.25 in井眼中的覆盖率接近90%,能够很大程度获取详尽真实的地层信息,可提供精细的、有针对性的测井数据,从而提高国产电成像仪器在高端测井服务市场的竞争力。
猜你喜欢
今日农业(2022年15期)2022-09-20
承德石油高等专科学校学报(2022年2期)2022-05-18
今日农业(2021年21期)2021-11-26
科技视界(2021年4期)2021-04-14
石油管材与仪器(2020年5期)2020-11-05
石油钻探技术(2020年4期)2020-10-09
石油钻探技术(2020年4期)2020-01-08
无机盐工业(2019年5期)2019-05-24
价值工程(2018年3期)2018-01-23
中学生数理化·高二版(2016年10期)2016-12-24