一种时分自组网无人机数据链的设计
2021-04-12 01:44天津航天中为数据系统科技有限公司魏艺明朱铁林牛立新
电子世界 2021年5期
天津航天中为数据系统科技有限公司 魏艺明 朱铁林 牛立新
数据链依托有线或无线通信信道,在载荷设备、控制设备、指挥平台之间传输信息,其搭载于无人机的使用方式已在电力巡检、海域监测、目标侦察等领域获得广泛应用。采用无人机搭配数据链可代替人工在严苛的环境中作业,在要求的时间内完成传感器信息的有效采集,以及控制和状态信息的传递,将信息汇集到指挥控制平台中统一管理,为行业应用提供高效、便捷的实现手段。
随着行业技术革新,无人机逐渐向敏捷和多样化的趋势发展,其监视目标的范围逐渐扩大,传统的点对点传输很难高效完成任务,且常需要同时传输视频图像和控制信息等数据,信息量增大,对传输可靠性提出了更严格的要求。为适应更多机型,数据链设备要小型化、低功耗,提高接口兼容能力和传输效率,增加多点传输功能实现多机同时作业。
从功能、应用和技术三方面考虑,设计了一种采用时分双工工作方式,可实现自动组网的数据链,具有串口、CAN接口适用于多种类型传感器和控制设备,同时具备图传和数传功能,可接受高清和标清视频输入,集射频和数字电路于一体提高了设备集成度,自动组网的功能可实现点对多点的数据传输。
1 时分自组网数据链总体方案
数据链分为机载端和地面端,机载端由机载设备和天线组成,搭配载荷、飞控设备使用;地面端由地面设备和天线组成,搭配计算机和显示器使用。机载端和地面端之间建立无线信道,上行可实现对链路、飞机的控制,下行可实现视频图像、链路状态、飞机状态等信息的传输,发送控制指令和数据显示可在地面计算机的指挥控制界面中实现。
系统采用时分双工加时分多址的通信方式,采用BPSK调制以提高链路传输可靠性,采用(4,3,7)卷积编码传输控制和状态信息,以减小延时、提高传输信息的实时性。传输视频等数据量较大的信息时,采用3/4 LDPC编码,抵抗多径干扰的同时能带来约3.5dB的链路余量。自组网的过程中系统自动分配时隙,减少了人工干预,提高了使用灵活性。时分双工的设计免去了双工器的使用,相比频分双工的设计更容易实现小型化和低功耗。
2 系统硬件设计
2.1 机载设备
机载设备可实现控制、状态数据收发,视频采集编码功能,具有串口、CAN数据接口,以及SDI高清视频接口和CVBS标清视频接口,有以下功能模块:(1)中射频模块:采用“FPGA+变频收发器+射频前端”架构,将调制解调、编码解码、时域均衡等中频处理过程在FPGA中编程实现,通过变频收发器进行数模和模数转换,再经过射频前端实现功率放大发送和低噪放接收,中频和射频电路集成在一块板卡,通过合理划分地平面和屏蔽设计防止干扰使整机小型化,时分双工使信道分时复用,可减小系统功耗;(2)视频编码模块:以H.265视频编码芯片为核心,搭配SDI高清和CVBS标清视频采样芯片,支持NTSC、PAL、720p60等分辨率的视频输入,相比H.264编码方式最多能降低50%的码率,提高了视频传输效率;(3)数据收发模块:采用CAN协议转换芯片和多协议串口转换芯片,支持CAN、RS232和RS422,适合多数传感器和控制器接口;(4)时钟模块:采用TCXO晶振和低抖动时钟分配器作为时钟源,保证信号稳定性;(5)电源模块:主电源可接受9~36V电源输入,使用多通道降压稳压器和LDO芯片为各功能模块供电。机载设备上电后自动检测自身状态,向地面发送带有同步状态、视频状态、信噪比的遥测信息。
2.2 地面设备
地面设备可实现控制、状态数据收发,以及视频解码输出功能,具有CAN接口、串口、网口,可直接输出SDI、HDMI、CVBS接口的高清和标清视频连接显示器观看,以及未解码的视频流支持在计算机软件解码观看,有以下功能模块:(1)中射频模块:采用“FPGA+变频收发器+射频前端”架构,除了中频处理和射频收发,还实现入网管理、数据分配等功能;(2)视频解码模块:以H.265视频解码芯片为核心,可直接硬件解码输出CVBS标清视频和HDMI高清视频,外接SDI串行器可实现SDI接口输出,支持多种高清和标清视频分辨率;(3)数据收发模块:CAN接口和串口支持用户数据直接输出,千兆网口支持全部数据发至计算机,在计算机的指挥控制界面可发送指令、读取数据、观看视频;(4)时钟模块:采用TCXO和时钟发生器构建时钟树为整机提供时钟信号;(5)电源模块:可接受9~36V电源输入,低纹波稳压器和LDO为各模块供电。在地面指挥控制界面可对机载和地面设备发送指令,调整功率大小、切换中心频点等,可查看机载遥测信息、地面站测信息、飞机状态信息等,实时了解链路状态。
3 系统软件设计
机载和地面设备上电后,自动组成以地面为中心的网络,入网成功后开始数据收发,地面设备根据每个机载设备的编号区分数据并分别控制或显示。系统采用时分多址的通信方式,时隙的划分如图1所示,分为上行遥控、下行数据和视频传输、入网申请三种时隙,在每两个时隙之间加入保护间隔防止跨时隙干扰。

图1 时隙划分
3.1 入网流程
机载设备上电后即进入入网流程,搜索测控范围内地面设备的遥控信号,未建立网络时,机载设备处于监听并申请入网状态。入网流程如图2所示,分为以下几步:(1)机载设备接收到地面遥控信息后开始同步,计算时隙位置,到达入网申请时隙时申请入网;(2)地面设备收到入网申请后查询已入网的飞机数是否达到饱和,没有达到饱和则从空闲的时隙中选择,按序号为新申请的飞机分配时隙,并发送含有机载设备编号的允许入网通知,已饱和则发送禁止入网通知;(3)机载设备在遥控时隙接收到带有自己编号的允许入网通知后,则成功入网并发送下行信息,地面设备在指定时隙接收到可确认机载设备入网成功,如果一定时间内没有收到,或收到禁止入网信息,则随机延时一段时间后再申请入网。
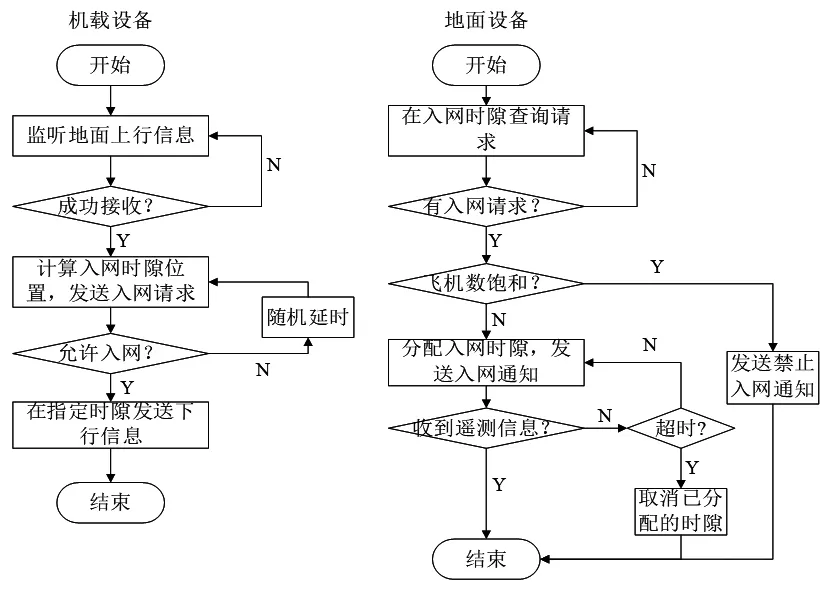
图2 入网流程
3.2 数据处理流程
下行数据处理流程:下行传输的信息包括视频及传感器信息、飞机状态信息和链路遥测信息。机载设备中,视频经接口转换和编码压缩后转换为1.6Mbps的码流,传感器信息和飞机状态信息由串口、CAN接口输入,遥测信息由设备检测链路状态后产生,下行信息在FPGA内经过组帧、编码、调制后转换为射频信号发送到地面。地面设备在FPGA中进行解调、解码、解帧后根据数据类型分类, 飞机状态信息和链路遥测信息可通过串口或CAN接口直接输出到专用设备,经过的接口少延时低,同时全部下行信息可通过千兆网口输出到计算机指挥控制界面进行后续操作,视频既可以连接地面设备的SDI、HDMI高清或CVBS标清输出接口直接观看,也可以通过解码软件观看,提供多种使用数据的方式。
上行数据处理流程:上行传输的信息包括飞控信息和链路遥控信息。上行控制信息既可以在专用设备上通过串口或CAN接口直接发送,也可以在指挥控制界面中发送。上行信息在FPGA中组帧、编码、调制后转换为射频信号发送到机载设备,机载设备收到后根据类型区分,飞控信息通过CAN接口或串口发至飞控设备,遥控信息由机载设备解析,进行调整功率、切换频点、入网退网等操作。
4 系统测试
为测试系统功能,搭建了一站三机链路,系统带宽12 MHz,机载设备发射功率30 dbm,地面设备发射功率32 dbm,天线增益6 dBi,当传输距离为10 km时,下行有11 dB链路余量,上行有14 dB余量,余量足够可保证传输距离。
(1)组网功能测试。上电后,如果成功入网三个机载设备会分别回报链路遥测信息到地面,根据遥测帧协议可解析出编号为1B18的机载设备入网序号为1,编号为2724的入网序号为2,编号为1417的入网序号为3,三个设备有不同的编号并且能循环回报表示入网成功,根据遥测信息,自检信息、信噪比、视频回报均在正常值范围内,表示机载设备状态、链路状态和视频编解码都正常。
(2)数据收发测试。连接串口转USB和CAN转USB转接线,使用串口和CAN接口调试助手进行数据收发测试,机载和地面设备同时发送和接收数据,串口发送100000字节以上,CAN接口发送扩展帧8000帧以上,经对比无错数和丢数,说明上行和下行的误码率小于等于10-5。
(3)视频传输测试。在电脑端使用VLC等视频解码软件打开RTSP网络串流,地面设备的视频输出接口连接显示器,可同时观看软件解码和硬件解码后的视频,经测试视频清晰流畅,三路互不干扰。
上行信息传输延时约20 ms,下行视频传输延时约230 ms,具有较好的实时性。机载设备加天线总重量小于200 g,功耗约7 W,重量轻体积小可在多种机型上搭载。
结论:为适应不断发展的行业应用需求,设计了基于时分双工和时分多址通信方式,可自动组网的数据链系统,系统能同时进行图像传输和数据传输,接口丰富可对接多种载荷和控制设备。设计采用自组网的方式降低了对人工操作的要求,在地面端可以便捷的进行链路控制和数据获取,满足多种机型的使用要求,在飞行试验和批量生产中都取得了良好的应用效果。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
中国石油石化(2022年12期)2022-07-16
舰船电子对抗(2020年2期)2020-06-23
中国外汇(2019年19期)2019-11-26
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
铁道通信信号(2018年9期)2018-11-10
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
中国市场(2016年36期)2016-10-19