
激光雷达测量误差的分析与修正
——以电科38 所出品的激光雷达为例*
2021-04-12 09:29储政勇
科技与创新 2021年7期
储政勇,王 俊
(合肥公共安全技术研究院,安徽 合肥 230031;安徽省公共安全应急信息技术重点实验室,安徽 合肥 230031;中国电子科技集团第三十八研究所,安徽 合肥 230031)
1 引言
近年来,随着汽车自动驾驶技术的兴起,激光雷达作为自动驾驶系统的核心部件取得了长足发展,先后经历了机械式激光雷达、混合固态激光雷达与固态激光雷达等发展阶段[1],测量范围可达数百米,测量精度可以达到厘米级别,且随着工艺的改进,其成本也能控制在较低的范围。激光雷达具有速度快、分辨率高、非接触等优点,除了在自动驾驶领域,在地形测绘、复杂古建筑保护以及大尺寸三维建模等领域均有广泛的应用前景[1-3]。
激光雷达的测距原理为激光时间飞行法[4],由激光器发出短脉冲激光信号,经被测物反射后沿原路返回,被探测器接收。其测距精度由时间测量单元的精度决定,通常只能达到厘米级别,且易受环境因素的影响,无法提供毫米级3D深度信息,限制了其应用领域的进一步发展。本文提出以最小二乘法构建三维点云数据的误差补偿模型,介绍了模型的构建原则与方法、计算过程,通过对电科38 所激光雷达测得的数据进行误差修正,验证了误差补偿模型的有效性,对于进一步扩展激光雷达的应用提供了思路。
2 激光雷达的测量原理
激光雷达主要由发射机与接收机两部分组成[5]。发射机主要由激光电源、激光器和发射光学系统组成。激光电源用于驱动激光器产生脉冲激光;脉冲激光由发射光学系统准直后射出,经被测物反射后由接收机光学系统收集;接收机主要由接收光学系统、光电探测器和信号处理电路组成。接收光学系统的作用是会聚从目标反射回的激光,光电探测器将会聚到的激光转换为电流信号,由信号处理电路完成跨阻放大、时刻鉴别与时间测量等功能。传统机械式激光雷达使用多个激光器组合的方式完成多线扫描,使用APD 探测器阵列进行光电转换,使雷达的装配与加工复杂,且成本较高。
相较于传统的机械旋转式激光雷达,电科38 所生产的激光雷达使用垂直腔面发射激光器(VCSEL)阵列有序地发射激光束,并使用具有单光子灵敏度、低噪声和优异的时间分辨率的单光子雪崩二极管(SPAD)阵列作为光电探测器,具有高分辨率、低成本等优点,其结构如图1 所示。在该型激光雷达的设计中,为了保证VCSEL 阵列上面的每一个激光发射器之间的出射激光不存在串扰,发射光学系统首先使用微型透镜组(包括滤光片、准直透镜和孔径光阑)使VCSEL 的激光以标准的点光源出射,然后经过较大的物方远心镜头出射为呈一定倾斜角度的平行激光束,通过光学系统设计实现竖直向45°视场角和0.35°的角分辨力;与发射光学系统类似,接收光学系统也包括以上组件,具体结构如图2 所示。本实验所用中距离激光雷达的探测距离可达120 m,测量精度小于±5 cm,每秒种采样点数可达260 万个[6]。
3 实验测试与数据分析
3.1 实验测试
本文以白板为测试对象,对激光雷达进行了测试,实验装置如图3 所示,白板垂直放置于距离激光雷达3.5 m 的位置。选取激光雷达输出点云数据中包含被测白板的部分,重复采集该部分点云数据10 次,10 次测量结果的均值如图4所示,测得的白板形貌数据波动较大,约为±15 mm,存在较大的测量误差。
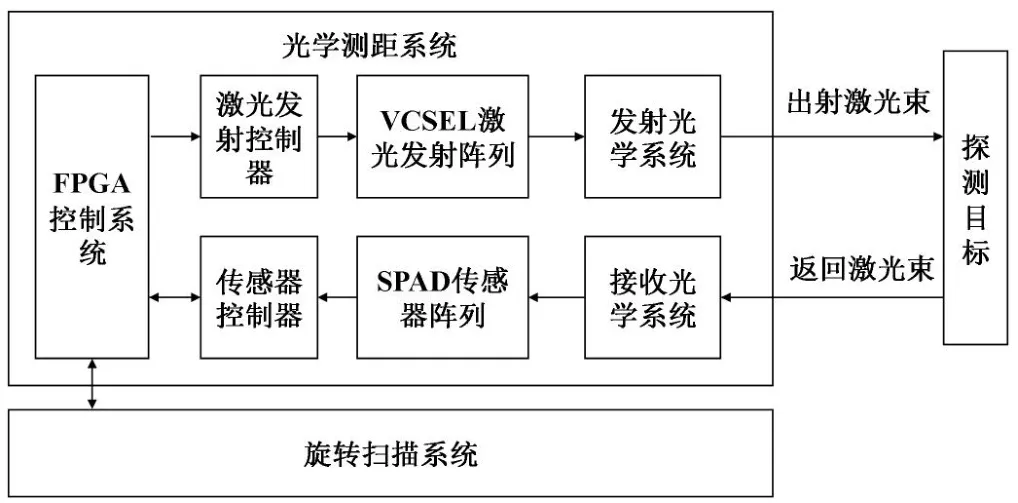
图1 电科38 所激光雷达的结构示意图

图2 中距激光雷达的发射和接收光学系统结构示意图[6]

图3 激光雷达性能测试装置图

图4 白板的三维点云测量数据
从点云图中可以看出,板面形貌的测试数据在水平向的高低波动存在规律性。由于电科38 所中距激光雷达在水平方向通过电机旋转实现360°扫描,竖直方向通过布置多激光器和探测器实现扫描,因此该雷达存在与激光器一致性的相关联的系统误差,通过对点云数据中的每一线数据进行数据拟合,然后根据拟合结果对原始测量数据进行修正,可以提高激光雷达的空间位置测量精度。
3.2 数据分析
实验数据处理中,经常从一组测量数据(xi,yi)出发[7-9]寻找关于被测函数y=f(x)的近似表达式y=p(x)。由于测量数据包含一定的随机误差,一般用曲线拟合的方式进行处理,根据“偏差平方和最小”的原则确定拟合曲线y=p(x),此种方法称为最小二乘法。
其主要步骤为首先根据测量数据确定表达式y=p(x)的形式,设拟合函数为:

其中I为拟合误差。然后用最小二乘法求解并进行曲线拟合,使I取最小值,并求其偏导为零时对应的参数得到拟合曲线,具体流程如图5 所示。

图5 最小二乘拟合流程图
本实验所选取的测量面内包括了14 线的水平扫描数据,分别对这14 线的扫描数据进行最小二乘法的多项式拟合,结果如表1 所示。基于表1 所示的数据拟合结果对图4 的点云数据进行误差修正,修正后的白板形貌点云数据如图6 所示,数据波动较图4 减小了2/3 以上,约为±4 mm,接近于白板的平面度的实际值,可见本文所述方法较好地修正了激光雷达的扫描测量误差,有利于拓展激光雷达的应用范围。
4 总结
激光雷达技术已成为自动驾驶领域研究与应用的热点,且在安防、无人机、地形测绘等领域存在广泛的应用前景。但较低的测量精度限制了激光雷达进一步的发展,对激光雷达进行测量误差修正有助于提高测量精度,扩展激光雷达的应用范围。本文介绍了一种基于最小二乘拟合的激光雷达测量误差修正方法,以电科38 所中距激光雷达为例,通过修正其实际测量数据,将测量精度由厘米量级提高到毫米量级,取得了较好的效果,验证了该方法的可行性,为激光雷达的测量误差修正提供了新的思路,有利于扩展激光雷达的应用领域。

表1 14 线水平向扫描数据拟合结果
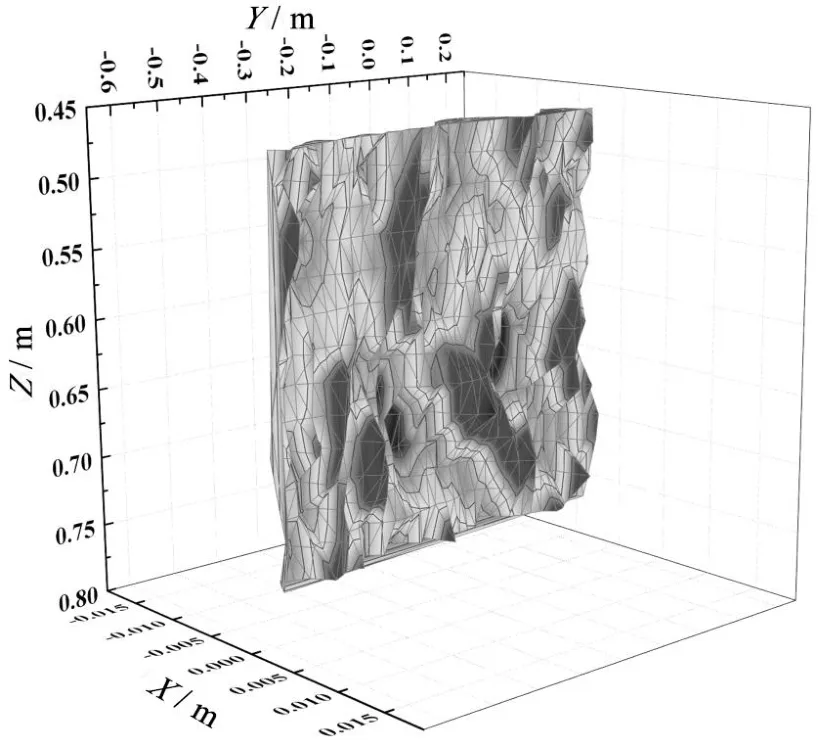
图6 误差修正后的白板的三维点云测量数据
猜你喜欢
制造业自动化(2022年9期)2022-10-03
红领巾·萌芽(2022年3期)2022-03-13
中国军转民·下半月(2021年7期)2021-10-08
支点(2021年8期)2021-08-16
物联网技术(2016年12期)2017-01-21
科技视界(2016年26期)2016-12-17
军工文化(2016年1期)2016-06-01
微型计算机·Geek(2009年3期)2009-12-11
