
ADAS 技术与市场现状综述
2021-04-12 09:29梁伟强洪福斌
科技与创新 2021年7期
梁伟强,洪福斌
(国网电子商务有限公司, 北京 100053;国网雄安金融科技集团有限公司,河北 保定 071000)
随着经济和社会的发展,汽车已经进入千家万户,成为必备出行工具,2010 年,全国汽车保有量为7 801.83 万辆,到2019 年底,全国汽车保有量增长至2.6 亿量,保有量同比增长233.26%。在保障基本出行使用需求的基础上,人们对汽车智能化和安全辅助功能愈发关注。智能传感器、车联网、5G 通信和人工智能算法的不断成熟,为车辆辅助驾驶提供了可能。
本文通过介绍高级辅助驾驶系统(Advanced Driving Assistance System,简称为“ADAS”)的概念和分类、核心算法、国内应用现状以及未来行业发展趋势等,帮助读者对该技术领域有清晰的认识。
1 ADAS 概念与分类
ADAS 是通过安装在汽车上的摄像头、激光与毫米波雷达以及卫星导航数据,在车辆行驶过程中,随时感知外部环境变化,采集数据,并经由各类算法进行场景分类和运算,进行静态、动态物体识别、侦测与跟踪,发现影响行车安全的行为或隐患,以图标闪烁或蜂鸣提示音的方式及时告知驾驶员,为驾驶员采取应对措施争取更多的反应时间[1]。
高级别应用,甚至可以介入驾驶过程,进行车辆姿态调整或紧急避险,ADAS 设备的引入有效提高了汽车驾驶的舒适性和安全性。近年来ADAS 市场发展迅速,已由原来定位于高端车,逐步进入中端车市场,并成为车型亮点和卖点,与此同时,许多ADAS 驾驶风险提示类基础应用在入门级乘用车领域更加常见[2]。随着传感器、5G 通信技术及人工智能算法的不断发展,为ADAS 技术升级及系统部署创造了新的机会与策略。
通常ADAS 设备的数据采集单元包括摄像头、雷达(激光或超声波)、温度、光线和压力传感器,用于识别物体、测距,以及探测光、热及压力或其他汽车状态变量[3]。部署位置通常位于车辆的前后保险杠、后视镜或挡风玻璃上。早期的ADAS 技术专注于被动报警,随着车辆电控技术不断发展,ADAS 技术正逐渐衍生出完善的主动式安全防御解决方案[4]。
目前ADAS 设备根据功能和使用场景不同,划分为信息感知类、决策预警类、驾驶辅助类和部分自动驾驶四大类。四类中的具体功能如表1 所示。

表1 ADAS 设备分类
2 ADAS 核心算法分析
ADAS 设备的正常运转需要大量的图像识别、跟踪等人工智能算法作支撑,鉴于本文篇幅有限,选取车道检测、行人检测和疲劳驾驶检测三类场景用到的算法进行介绍。
2.1 车道检测算法
车道线用于指引交通,保障驾驶安全,车辆按车道引导规范驾驶,是减少行车事故最直接有效的方法[5],在高级辅助驾驶ADAS 功能中,车道保持和偏离预警是最常见的功能之一,普及率相对较高。通常,车道检测主要包括道路标线检测和道路转弯半径检测。
2.1.1 道路标线的检测
判断车辆是否正按照正确的道路标线行驶,对于保障驾驶安全具有重要意义。车道偏离预警是ADAS 功能中典型的功能之一。一般情况下,车道偏离预警系统由摄像机、速度传感器、信息处理单元、方向盘调节器和报警系统组成。一旦检测到车道偏离,会通过蜂鸣器或液晶仪表的图像向驾驶员报警,高级车型甚至会主动进行方向修正或主动降速[6]。该功能领域较成熟,目前有较多成熟产品。车辆偏离预警系统多采用单目摄相机探测道路标线,采用双目摄像机系统可显著提高不同光照下道路标线的识别精度,此外,为信息处理单元引入神经网络算法,可提高道路标线识别的精度[7];通过引入HSV 颜色空间和数字图像处理(DSP)算法来提高道路标线识别的实时性。
2.1.2 弯道的检测
对于陌生路况,在驾驶员注意力不集中或视线条件差的情况下,如果车速过快,极易发生翻车或碰撞事故。为降低事故率,通过车载设备如激光雷达、摄像机和计速器主动探测前方弯道信息,并由数据处理单元计算出安全过弯的临界速度,并以此来判断驾驶员当前是否超速,如果车速超过估计的安全速度,系统则发出警报信号;如驾驶员未减速,则自动操作制动减速。基于区域生长和曲线拟合的弯道识别算法,是当前较常用的弯道检测算法。
2.2 行人检测算法
计算机视觉包含广阔的知识和学科领域,涉及到生活的方方面面,行人检测属于该领域下的目标检测范畴[8]。当前较为流行的行人检测方法主要是通过机器学习来对提取到的特征进行检测识别[9],不少研究者通过从不同角度对其进行研究并做了多种改进,取得了较好的检测效果。
目前,主流的行人检测算法分为基于分类和基于模板匹配的行人检测算法两类。基于分类的方法需要先行从大量标记的正负样本(含行人或不含行人)中提取有效的行人特征来训练分类器,然后利用训练成熟的分类器判断待检图片,给出是否包含行人的检测结果;基于模板匹配的行人检测方法则是提取待检图片中的行人信息与构建好的行人模板库中的行人进行对比,根据对比结果判断其是否是行人[10]。
基于机器学习的行人检测方法属于第一类算法,是目前比较流行的行人检测算法,其核心思想是提取能够充分表征行人的本质特征训练行人分类器,之后,利用分类器判断输入的图像是否包含行人[11],该算法的一般过程是分类器训练和测试。而分类器训练又分为数据集准备、特征提取和分类器训练三个环节,分类器测试分为窗口选择、特征提取和分类器分类[12],行人检测流程如图1 所示。
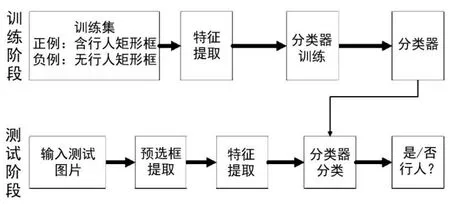
图1 行人检测流程图
2.3 疲劳驾驶预警检测算法
第一代疲劳状态监测算法多采用专家系统和规则算法,其基本原理是设定某一门限值,再根据驾驶员面部、眼部、头部或驾驶行为分析计算得到一个疲劳程度值。当该值大于预先设定的门限值时,则判定驾驶员处于疲劳状态;反之,则驾驶员处于正常状态。市场上在售的配备疲劳驾驶检测功能的车型多数也采用此类方法,优点是集成简单,占用内存小,实时性好,适用于多数路况;缺点是单一阈值不能兼顾驾驶员的个体差异,受光线、角度或复杂路况的影响较大。常用人脸检测方法如图2 所示。
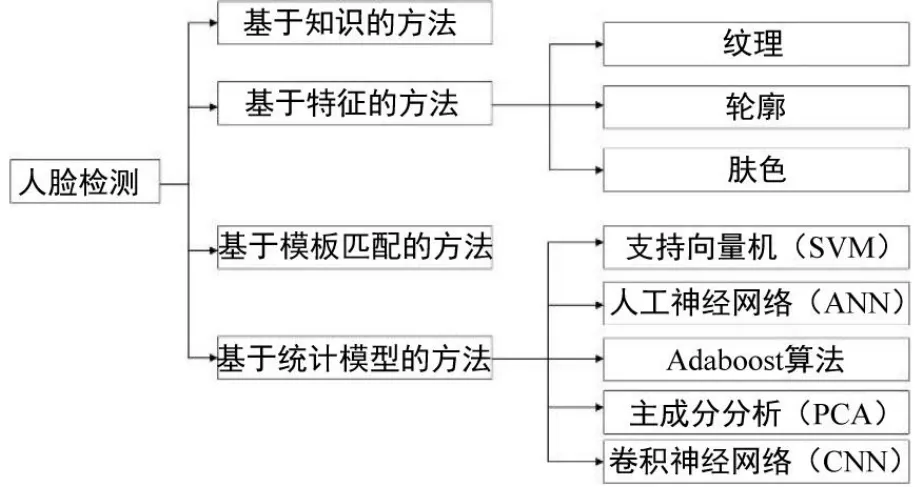
图2 常用人脸检测方法
云计算、车载芯片和移动通信技术的快速发展,为ADAS 设备的集成方式带来了新的选择,占用较大算力和内存空间的机器学习算法可以选择部署在云端服务器而非集成在车载设备端,这些都为驾驶员疲劳状态监测设备运用机器学习算法提供了条件。机器学习的优点是支持海量数据处理,计算精度逐步提升,不需要预建立复杂的数学模型;缺点是需要较大的算力和内存空间支持,影响车载端设备体积和集成方式。
机器学习算法支持多类型数据融合处理,在检测驾驶员疲劳状态时,不仅可以采集分析驾驶员面部、眼部、头部等的图像或视频信息或者车辆状态、行驶轨迹和刹车信号,还可以通过网络接口获取温度和交通路况等信息,并进行整合分析。相较于传统方式,机器学习算法大大提高了驾驶员疲劳状态的识别精度,但运算时需要更大的算力和内存空间支持,往往会增大ADAS 设备的体积,难以与车辆电控系统进行集成。随着云计算、5G 通信技术的发展,需要大量计算的机器学习算法部署在云服务器上并满足响应时间要求成为可能,且不占用ADAS 车载终端控制器算力和内存资源,在不增加硬件成本和开发投入的情况下,提高了驾驶员疲劳监测的精度。机器学习算法在驾驶员疲劳状态监测、车道检测和行人检测原理上具有共性,因此在疲劳检测系统检测精度提高后,可以进一步扩大应用范围,用于防撞和车道偏离预警等方面,进一步保障行车安全。
一种典型的基于机器学习算法的驾驶员疲劳驾驶预警流程如图3 所示。

图3 基于机器学习算法的疲劳监测流程
其中PERCLOS 值是最经典的驾驶疲劳度量指标,最早由美国人WIERWILLE 提出,他通过大量实验证明,眼睛的闭合时间一定程度上可以反映人的疲劳状态。因此,将PERCLOS 值定义为单位时间内(一般取1 min 或者30 s)眼睛闭合一定比例(70%或80%)所占的时间,具体如下:

PERCLOS 测量的参数指在单位时间内眼睛闭合程度超过某一闭值(70%或80%)的时间占总时间的百分比。PERCLOS 方法的常用标准有以下三类。
P70:指眼睑遮住瞳孔的面积超过70%就计为眼睛闭合,统计在一定时间内眼睛闭合时所占的时间比例。
P80:指眼睑遮住瞳孔的面积超过80%就计为眼睛闭合,统计在一定时间内眼睛闭合时所占的时间比例。
EM:指眼睑遮住瞳孔的面积超过一半就计为眼睛闭合,统计在一定时间内眼睛闭合时所占的时间比例。
因此当满足如下条件时,则可判定人员处在疲劳状态:

3 ADAS 市场应用现状分析
在ADAS 市场规模上,国外已进入大众普及阶段,中国正处在快速发展阶段,《中国制造2025 重点领域发展路线图》强调,制定中国版智能驾驶辅助标准,基于车载传感器实现智能驾驶辅助,可提醒驾驶员、干预车辆,突出安全性、舒适性和便利性,驾驶员对车辆应保持持续控制;到2025年,交通事故数减少30%,交通死亡数减少10%,DA 智能化装备率40%,自主系统装备率50%。
ADAS 作为辅助驾驶的核心产品,国内市场规模在迅速攀升[13]。据统计,2020 年中国ADAS 市场规模为878 亿元,比2019 年的421.1 亿元增长了108.5%,中国ADAS 市场规模如图4 所示。

图4 中国ADAS 市场规模(单位:亿元)
总体上,随着人们对辅助驾驶功能认可度的提升,选购新车时,是否支持辅助驾驶功能已经成为重要的考量因素,车企顺应市场需要,及时调整新车配置项,由于市场认可度持续走高,新车ADAS 装配率呈大幅走高趋势,但消费者差异化需求难以统一,因此在不同功能件的装配率上略有差异。从ADAS 细分功能上看,自动紧急制动AEB、并线辅助LCA 等功能在新车装配率上居前,超过15%。与此同时,ADAS 产品其他功能的装配率也在稳步提高,其中泊车辅助控制系统PA、自适应巡航ACC 和车道偏离预警系统LDW三类功能的新车装配率较高,相较2019年均提高了4%以上。夜视系统NVS 和智能远近光灯等功能由于技术难度大、造价昂贵等因素,形成了明显的价格门槛,逐步定位于部分高端车型,造成目前市场装配率较低并呈下降趋势。提高装配率,需要相关技术和制造工艺有新的突破,降低装配成本。按车型级别统计发现,ADAS 相关功能在豪华车上的装配率逐年上升,驾驶辅助类配置装配率高于感知决策预警类,其中自动刹车、自动泊车入位、车道偏离预警系统的装配率较高[14];B 级车方面,ADAS 功能在SUV 上的装配率提升明显,整体装配率仍相对较低,360°行车摄像头和并线辅助功能的装配率相对较高;在以经济实用为主的A 级车上,ADAS设备的装配率较B 级车明显降低,但全景摄像头成为该级别车型上的流行装备[15],预计在ADAS 设备技术普及和生产成本降低后,A 级车装配率会有较大提升。
从车型价格上看,ADAS 相关配置已经开始由高端豪华向低级别及自主品牌延伸,12 万左右的车型打造ADAS 部分功能已经很常见。2020 年与2017 年部分ADAS 功能装配渗透率对比如图5 所示。
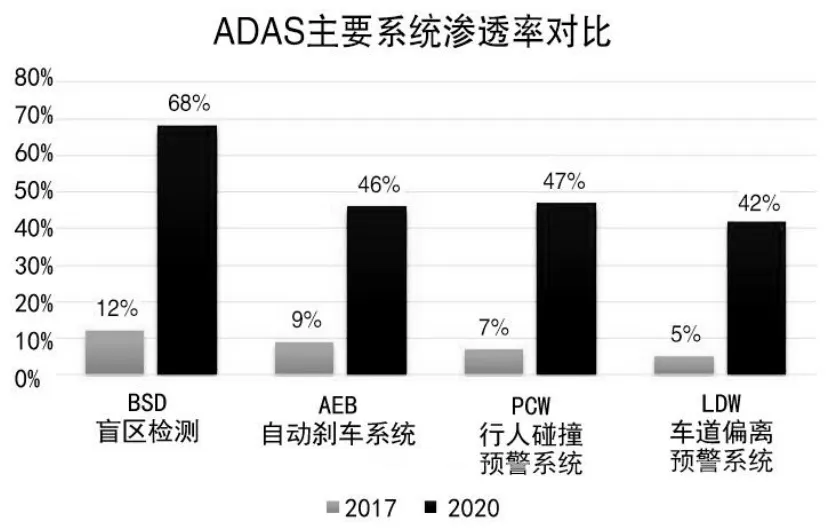
图5 各系统搭载趋势
截至目前,中国主流车企已经在部分量产车型上装配了DA 级辅助驾驶系统,并达到美国技术标准要求。部分企业计划在2020年,在高端车型上装配PA级部分自动驾驶系统。各大车企自动驾驶战略布局规划如表2 所示。

表2 各大车企战略布局规划
4 ADAS 产品发展趋势分析
近年来,随着消费者对车辆安全性能关注度的提升,各大车企调整新车技术路线,为新车装配辅助驾驶功能,ADAS 的市场渗透得到了较大提升,并逐渐缩小与欧美国家的差距[16]。如果消费者的消费取向决定车企的技术改革动力,那国家政策就是一剂强心剂。为进一步通过技术手段,提升交通安全,国家部委先后推出多项政策规范,推动辅助驾驶技术的落地实施。2015-05 国务院发布《中国制造2025》,将智能网联汽车作为一项重点发展内容,将自动驾驶技术作为核心攻关目标。国标GB 7258《机动车运行安全技术条件》中规定,车长大于11 m 的客车必须装配牵引碰撞预警系统(FCW)和车道偏离预警系统(LDW)。国家发改委、科技部、工信部于2017-04 联合发布《汽车产业中长期发展规划》,规划要求到2020 年,汽车驾驶辅助(DA)、部分自动驾驶(PA)、有条件自动驾驶(CA)系统新车装配率超50%,智能网联式驾驶辅助系统装配率达到10%,基本满足智慧交通城市建设需求。2018 年C-NCAP 中主动安全的评分权重占到了15%,并增加了关于自动紧急制动系统(AEB)与车身稳定系统(ESC)的评分项目;并且在CNCAP 2018 计划中指出到2018 年所有新车必须包括ADAS系统。
综合国家政策刺激、消费者需求度以及技术成熟度三方面因素,未来ADAS 设备厂商不缺乏持续进行研发投入和技术升级的动力,随着各项技术的不断迭代更新,设备成本不断减少。单一功能ADAS 设备的均价会随着普及率的提升而逐步下降,消费者将占据市场主导地位,选配主动性将得到加强。预计未来的2~3 年内,中国ADAS 市场将进入快速扩张期,在ADAS 的细分功能模块中,碰撞预警和盲区监测系统(BSD)装车量将持续保持最高装车量,但所占比例有所下滑,而诸如自动紧急制动(AEB)、驾驶员疲劳检测、泊车辅助控制系统等功能装车率将有所提升。中国汽车市场对ADAS 的需求量在未来三年内将保持持续增长的趋势,在2021 年可实现千亿市场规模。预计到2025 年,高级自动驾驶汽车量产后,ADAS 市场会逐渐进入平稳发展期。
5 结束语
本文通过介绍ADAS 设备概念及分类、设备核心算法、市场现状分析及未来预测,为读者大致呈现了中国乘用车ADAS 产业现状。但鉴于论文篇幅有限,对于核心算法介绍部分,采取了举例介绍方式,由于ADAS 各细分功能场景差异性较大和人工智能算法领域的迭代更新速度快的特点,举例介绍的算法适用性有待进一步研究和论证。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
现代电子技术(2022年15期)2022-07-28
电子产品世界(2022年4期)2022-04-21
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
意林(2021年5期)2021-04-18
计算机系统应用(2021年2期)2021-02-23
扬子江(2019年1期)2019-03-08
软件导刊(2017年4期)2017-06-20
小天使·一年级语数英综合(2017年6期)2017-06-07
