基于ETCS 的ATO 系统车地无线消息研究
2021-04-10 08:15何镭强
铁道通信信号 2021年1期
何镭强
欧洲列车运行控制系统(ETCS)是为了解决欧洲各个国家铁路信号系统的互联和兼容问题,由欧洲铁路部门(ERA)组织制定的统一的、开放性的信号系统。ETCS 在兼容既有信号系统的同时,实现了各国列车在欧洲铁路网内的互通运营[1]。
近年来,为提高线路的运输能力和效率,欧洲铁路部门开始组织研究在ETCS 的基础上叠加自动驾驶技术(ATO)[2]。基于ETCS 的ATO 系统采用了独立于ETCS 的无线通道进行车地信息传输,并且无线消息报文定义也和ETCS 有较大的区别。本文对车地无线消息的定义及其应用原则进行研究。
1 基 于ETCS 的ATO 系 统
1.1 系统架构
2011 年开始,欧洲通过“泛欧交通运输网(TEN-T) ”“ 下 一 代 列 车 运 行 控 制 系 统(NGTC)”和“转移至铁路(Shift2Rail)”一系列项目,对铁路实现自动驾驶进行了研究。根据自动化等级的不同,研究分为GOA2 级(半自动化)和GOA3/4 级(无人驾驶/无人干预) 2 个阶段进行[3-5]。目前,GOA2 级的主要技术规范已经制订,基于这些规范,欧洲信号厂商完成了设备研发和试验室互联互通测试,即将进行现场验证[6]。
如图1 所示,GOA2 级的ATO 系统在ETCS、运输管理系统(TMS)的基础上,增加了ATO 车载设备和ATO 地面设备。ATO 车载设备和地面设备通过无线通信的方式,独立于ETCS 的既有通道,进行车地信息的传输[7]。整个系统由ETCS 实现安全防护,ATO 实现自动驾驶功能。
1.2 规范文件
为满足GOA2 级的功能需求,ETCS 在基线3版本的基础上,拟对下列规范进行修订[8]。
1) ETCS 人 机 接 口 规 范(ERA_ERTMS_015560),增加ATO 相关信息的显示。
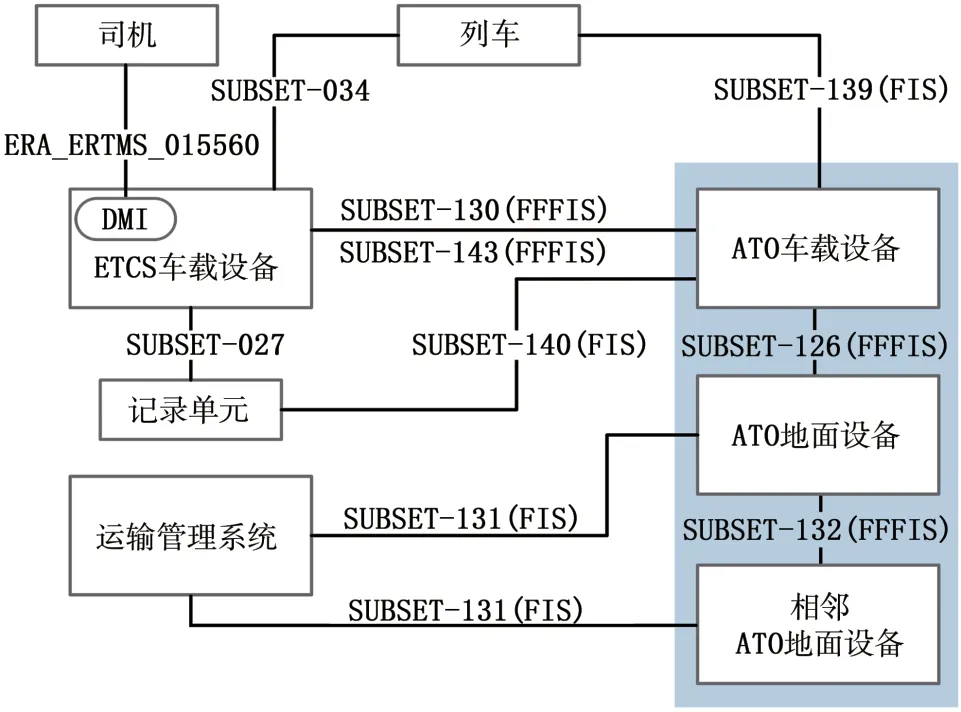
图1 ATO 系统参考架构
2)ETCS 系统需求规范(Subset-026),增加自动驾驶模式及相关处理。
3) ETCS 司法记录接口规范(Subset-027),增加ATO 的数据记录。
4)ETCS 列车接口规范(Subset-034),增加ETCS 与列车的接口内容,实现对ATO 的防护功能。
同时,ATO 系统本身也增加了许多新的规范子集,定义了ATO 系统需求和一系列的接口规范。如表1 所示,ATO 车载与地面设备、ATO 车载设备与ATP 之间均为形式规格化的功能接口(FFFIS),其他则为功能接口(FIS)。
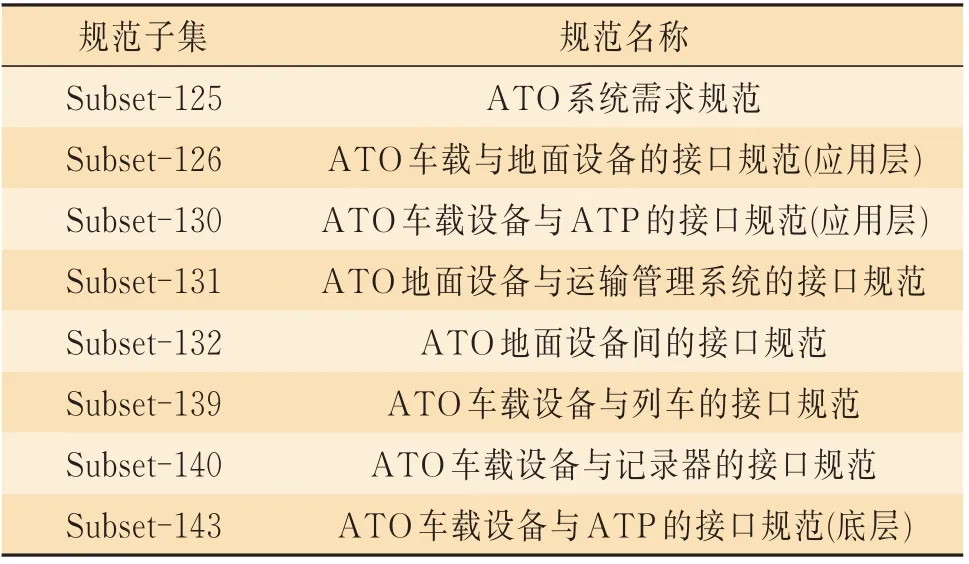
表1 ATO 系统新增规范
对于车地无线通信,表1 中仅Subset-126 在应用层进行了定义,作为FFFIS 重要组成的底层协议尚无相关规范发布。欧洲信号厂商在试验室互联互通测试时,使用了GSM-R 网络的分组数据业务(GPRS)。
2 车地无线消息组织处理方式
2.1 数据组织方式
基于ETCS 的ATO 系统参考城市轨道交通CBTC 的架构,故其数据组织方式与ETCS 有一定的区别。如图2 所示,ETCS 地面设备按列车的实际进路向车载设备发送线路数据,不管列车所经过的进路多么复杂,线路数据总是按进路纵向延伸[9],即ETCS 车载设备收到的是列车所要走行的线路数据。
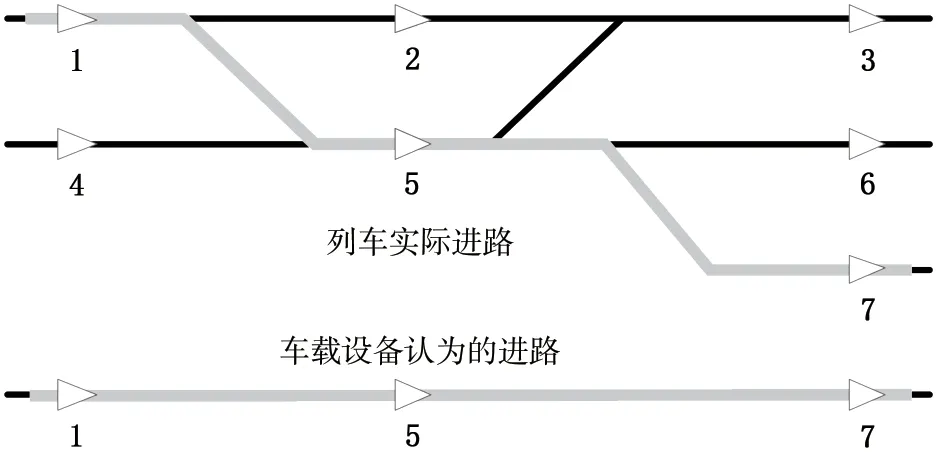
图2 列车实际进路和车载设备认为的进路
ATO 系统则采用不同的方式,将车载所需的控车数据分为2 层,分别为静态数据层和运行计划层。静态数据层描述了线路的限速、坡度、曲线半径,以及应答器、停车点、隧道、分相区等位置信息;运行计划层描述了列车的走行径路以及运行时刻、停车点、站台侧等信息。
在实现时,ATO 系统将线路划分为若干个区段,每个区段除了静态数据描述外,还具备版本和唯一的标识ID。正常情况下,ATO 车载设备应预存线路的所有区段数据。运行计划通过列车所要走行区段的标识组合,实现对走行径路的描述。2 种数据通过不同的无线消息提供。
运行过程中,ATO 车载设备根据收到的运行计划,从存储的区段数据中选取出所要走行的前方线路信息,并结合ATP 限速、列车运行时刻、能耗等因素,计算出一条最优速度曲线进行控车。当未找到运行计划对应的区段或版本不匹配时,ATO 车载设备应向地面设备请求更新对应的区段数据。
2.2 无线消息定义
基于ETCS 的ATO 系统共定义了9 条无线消息,用于车地信息传输,如表2 所示。其中,消息编号为3 的“计划曲线”(JP) 和消息编号为6 的“区段曲线”(SP)即对应上文所述的运行计划和区段数据。

表2 基于ETCS 的ATO 系统无线消息定义
与国内城际CTCS2+ATO、高速铁路ATO 系统相比,欧洲铁路未将车门/站台门的联动控制纳入ATO 功能需求,因此规范中没有相关的消息定义。
2.3 数据一致性检查
为确保控车的正确性,ATO 车载设备应对地面设备发送的无线消息进行检查,主要包括以下两方面。
1)进路一致性检查。ATO 车载设备根据“计划曲线”和“区段曲线”,计算得到列车所要走行的应答器链表。当ATP 预告的下一组应答器编号不在链表范围内时,ATO 车载设备应判断出发生进路一致性错误,退出控车。如果ATP 预告的是重定位应答器组,ATO 车载设备则不应进行检查。
2)“区段曲线”与“运行曲线”一致性检查。当运行计划预告的停车点不在区段数据中、运行计划预告的到发时刻乱序或者运行计划要求的某一区段与当前存储的数据版本不兼容等情况发生时,ATO 车载设备应认为存在一致性错误。如果该错误会影响列车到当前停车点的运行,ATO 车载设备将退出控车。
3 车地无线消息应用原则
3.1 通信会话建立
ATO 车载设备从ATP 获取机车号和车次号后,根据司机输入与地面设备建立无线连接。当连接建立后,ATO 车载设备向地面设备发送“握手请求”消息,当收到地面设备的“握手确认”消息后,即认为通信会话建立,如图3 所示。
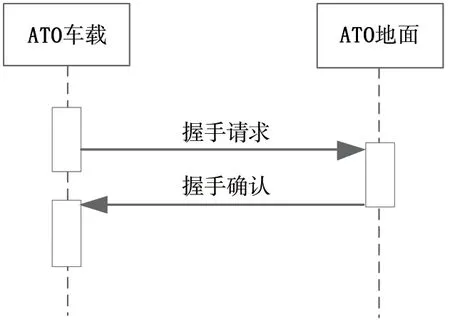
图3 通信会话建立
“握手请求”消息包含了车载设备支持的ATO系统版本列表。地面设备应在“握手确认”消息中告知本次通信会话所使用的ATO 系统版本。同时,“握手确认”消息还包含了消息超时重发时间和状态报告发送周期。
3.2 运行计划发送
如图4 所示,地面设备发送运行计划分为2 种情况。
1)当车载设备无运行计划可用或当前剩余计划不足时,主动向地面设备发送“计划曲线请求”,地面设备根据机车号和车次号回复对应的“计划曲线”。
2)当运行计划调整时,地面设备主动向车载设备发送“计划曲线”,车载设备回复“计划曲线确认”。
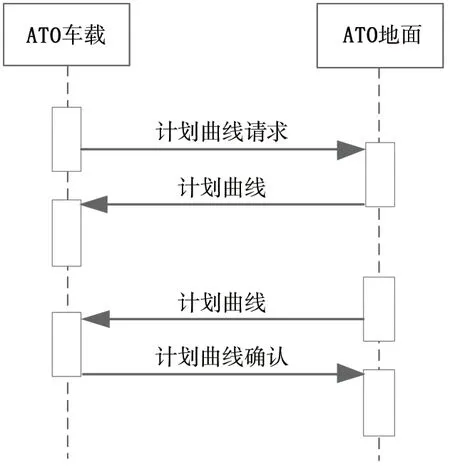
图4 运行计划交互流程
3.3 区段曲线发送
ATO 车载设备在收到“计划曲线”后,将检查车载数据库中是否已存储对应的区段。如果对应的区段不存在或者数据版本不兼容,车载设备将向地面发送“区段曲线请求”消息,如图5 所示。
“区段曲线请求”消息包含了车载设备未存储的或版本不兼容区段的ID,地面设备将根据该请求回复车载设备所需区段的数据。

图5 区段曲线交互流程
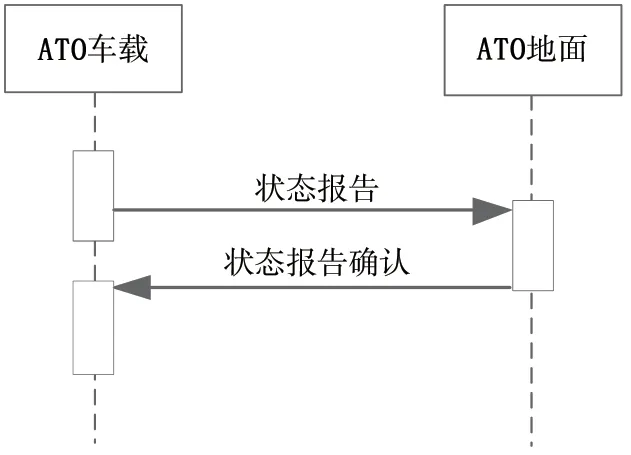
图6 状态报告交互流程
3.4 状态报告发送
如图6 所示,ATO 车载设备定期向地面设备发送“状态报告”,地面设备回复“状态报告确认”。“状态报告”消息中包含了车载设备的工作模式、列车速度、位置、停车精度以及实际的到发时刻,这些信息将由ATO 地面设备转发给运输管理系统TMS。
4 总结
近年来,自动驾驶已逐渐成为铁路发展的一个主要方向,欧洲计划2022 年将其纳入欧盟铁路信号 系 统 互 联 互 通 技 术 规 范(CCS TSI)[10]。与ETCS 相比,ATO 系统的车地无线消息虽然较为简单,但作为互联互通的组成部分,其重要性不言而喻。本文基于ETCS 的ATO 系统车地无线消息研究可为国内自动驾驶技术的发展提供一定的参考。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
铁路计算机应用(2022年5期)2022-06-08
华东交通大学学报(2022年1期)2022-04-06
云南画报(2021年11期)2022-01-18
装备维修技术(2020年3期)2020-11-20
中国科技纵横(2020年5期)2020-06-29
科技视界(2020年8期)2020-05-18
汽车维修与保养(2019年3期)2019-06-19
移动信息(2018年10期)2018-11-04
科技传播(2017年23期)2018-01-10