
某型无人机红外增强器挂载结构设计与分析
2021-04-09 11:00:30张晓木曹韦俊
兵器装备工程学报 2021年3期
张晓木,曹韦俊,万 欢
(南京模拟技术研究所, 南京 210016)
无人机是一种用动力驱动、可重复使用的无人驾驶飞行器。随着无人机性能的不断完善和改进,在军事领域得到了日益广泛的应用。无人机在军事训练领域主要用于模拟武器装备搜索、捕获、跟踪、攻击之典型作战对象的特性,为部队训练和武器装备系统能力评估提供目标和依据。
随着武器性能的不断提升,对无人机目标特性模拟能力的要求也越来越高。受经费、周期、可靠性等的限制,无人机新型号的研制过程相当漫长,且存在失败的风险。因此,通过在成熟无人机产品上安装能够经济、有效、逼真地模拟敌方飞机或巡航导弹目标特征的装置,可有效拓宽应用范围,延长生命周期[1]。某型无人机挂载红外增强器后逼真的模拟了典型目标的红外特性,满足了任务需求。在无人机生命周期内,根据客户需求进行定制的应用模式将成为无人机行业未来发展的主流。
本研究在某型无人机机翼上设计了具有足够强度的红外增强器安装结构,综合对比分析了两种结构布局的气动性能[2-7],选定较优结构进行了强度校核[8-10],并根据飞行试验结果对上述分析结果进行了验证。
1 挂载结构设计
某型无人机机翼结构由金属骨架和蒙皮组成。金属骨架是主承力构件,采用双梁式结构,机翼翼尖处预留有任务载荷的挂点,可挂载两枚红外增强器。
如在单侧翼尖挂载四枚红外增强器,需对机翼结构进行重新设计、加工,生产周期、成本均满足不了任务需求。考虑到目前机翼结构主要依靠金属骨架承载,采用对成品机翼改制新增挂载点的方案可满足上述要求。红外增强器是以固体燃料为燃烧剂,其红外辐射强度主要取决于燃料组分、工作温度、辐射体材料以及辐射体面积,为避免红外增强器工作时尾焰烧蚀机翼,在机翼两侧下翼面后梁距对称面 595 mm 处各增加一个挂载点,使红外增强器后端面与机翼后缘留出一定距离[11]。挂载结构件与机翼后梁、蒙皮通过结构胶粘接,见图1所示。该方案在机翼两侧翼尖、翼下分别挂载两枚红外增强器,可满足在无人机上挂载八枚红外增强器的任务需求。
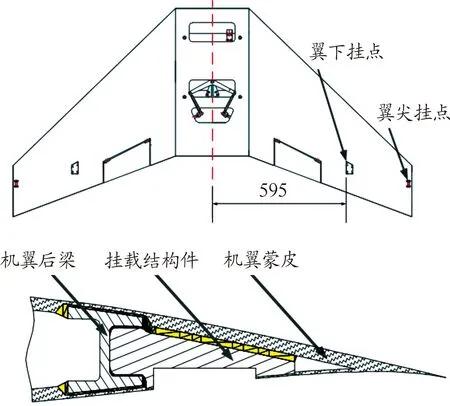
图1 机翼挂点结构示意图
为有效减小气动阻力,寻找最优气动布局方案,针对红外增强器挂架,在某型无人机机翼上设计了两种挂载结构:① 挂架呈Y型布局; ② 挂架呈T型布局。具体如图2所示。

图2 Y型/T型布局挂载示意图
2 气动方案对比分析
针对两种不同挂载方案,通过CFD计算基本纵、横向气动特性进行对比,并选出较优方案。
2.1 控制方程
采用三维Navier-Stokes方程对两种方案的全机气动模型进行数值仿真计算。在直角坐标系定义速度分量(u1,u2,u3),采取求和约定惯例,无热源三维Navier-Stokes方程守恒形式为:
(1)
式中:方程左侧为惯性力;右侧三项分别为内部压力梯度、作用在流体上的外力、作用在流体上的内部应力[12]。
2.2 计算模型与条件
数值计算采用ANSYS Fluent软件,计算边界条件见表1所示。坐标系规定为:x轴沿机身轴线,由机头指向机尾;z轴位于飞机对称面内,垂直x轴向上;y轴垂直飞机对称面,指向右翼,坐标原点位于机头。
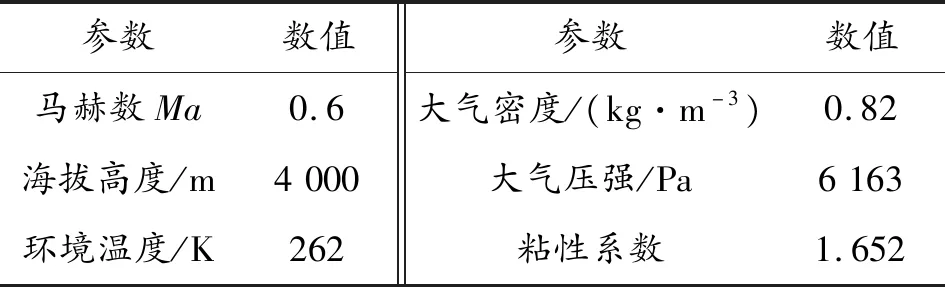
表1 计算边界条件
计算采用非结构网格,机体表面为三角形网格,面网格数约30万,体网格数约600万。2个方案计算模型的面网格、边界层网格、体网格生成时,选择的参数一致。
图3、图4为不同挂载方案局部网格示意图。
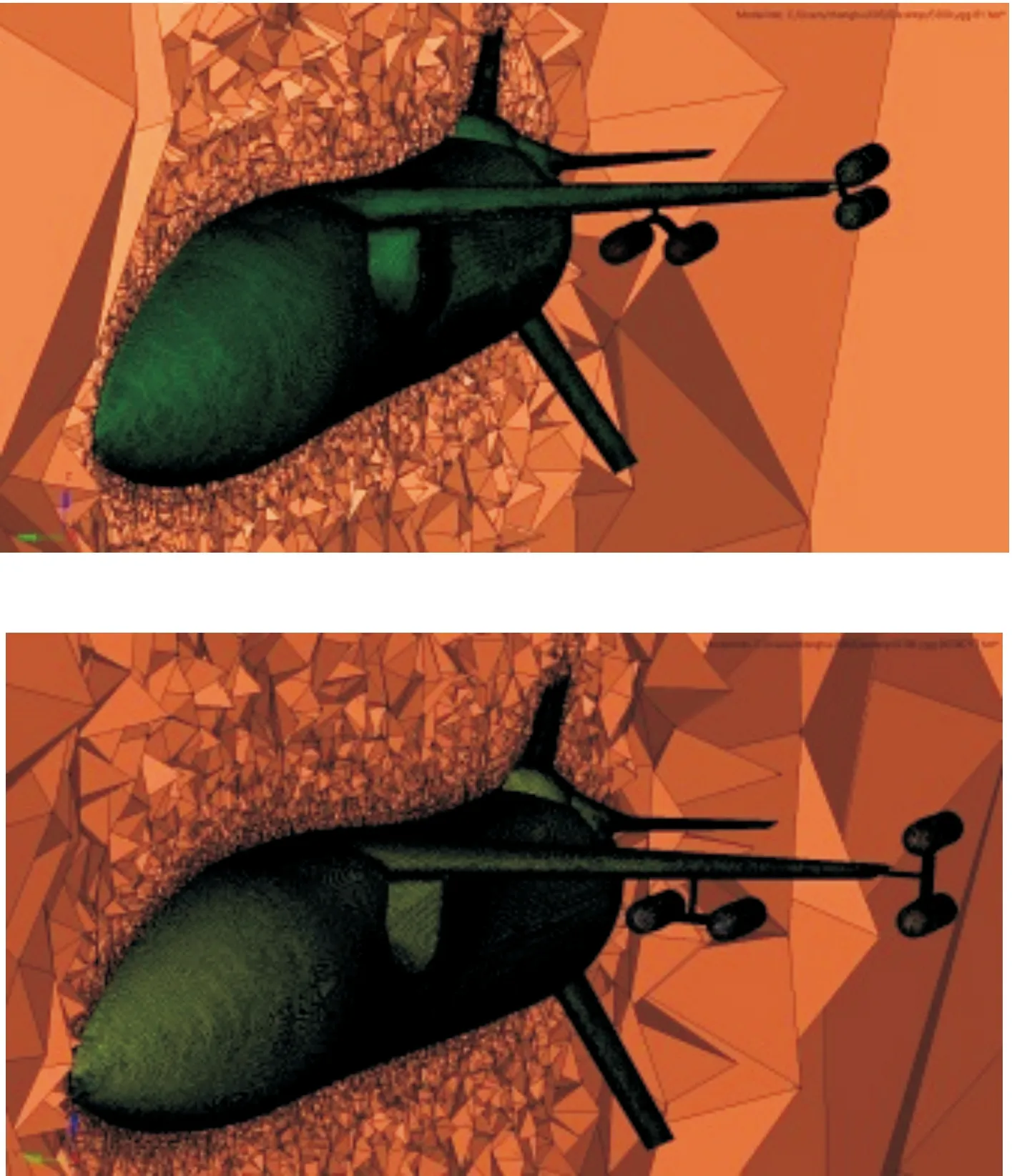
图3 方案1/方案2局部网格示意图
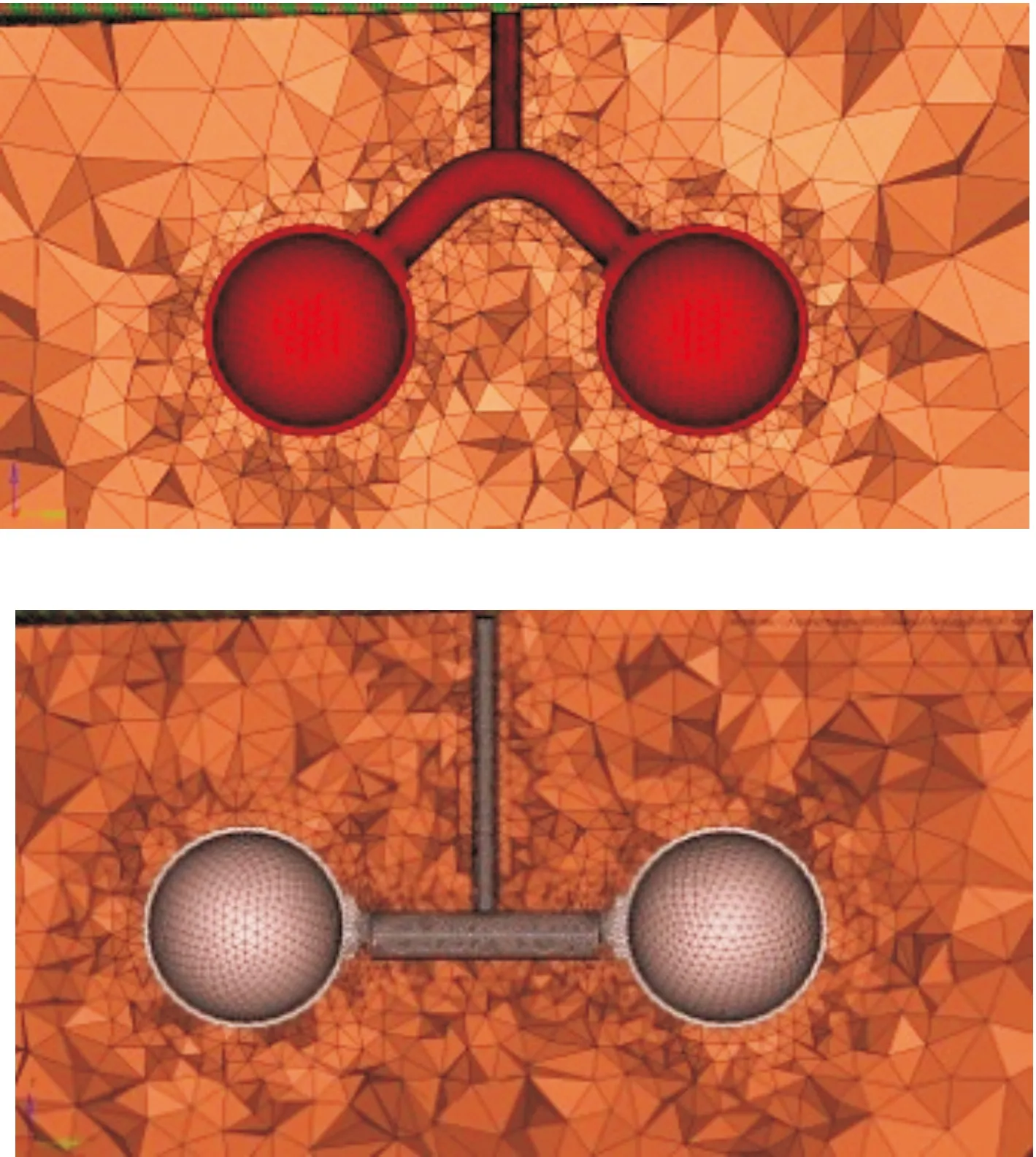
图4 方案1/方案2红外增强器局部网格示意图
湍流模型为SA—方程模型,纵向计算时攻角序列: 0°、2°、4°、6°、8°;横向计算时侧滑角序列:0°、2°、4°、6°。
2.3 基本纵向、横向特性对比
利用上述方法对模型进行了CFD数值计算,得到两种方案基本纵向、横向特性数据。在网格大致相同、湍流模型一致的情况下,将2个方案的计算结果与无人机初始布局特性参数进行横向比较。
2.3.1基本纵向特性
由图5、表2可见,2种方案基本纵向特性参数与初始布局相比,方案1总体变化最小。其中两方案的零升阻力系数增幅均较大,且差异也较大,方案1的增幅为45.6%,方案2的增幅为89%。阻力系数的增加将会导致无人机飞行过程中阻力增加,对爬升、航时等性能有较大不利影响。

图5 不同攻角下阻力、升力、俯仰力矩系数
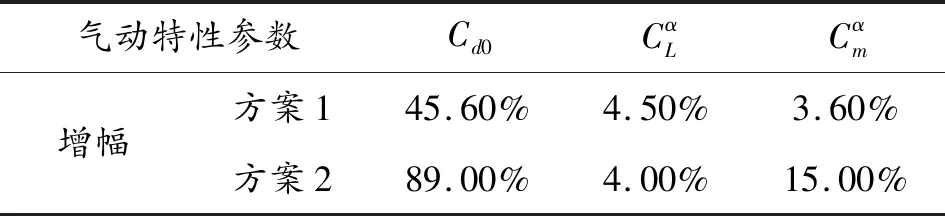
表2 两种方案基本纵向特性较原布局增幅统计
2.3.2基本横向特性
由图6、表3可见,2种方案基本横向特性参数与初始布局相比,方案1总体变化最小。其中方案1的横滚静稳定性导数与初始布局相比增大了20%。但经过分析评估因某型无人机副翼舵效较高,横滚静稳定性导数的变化对操纵性能影响较小,在指标允许范围内。
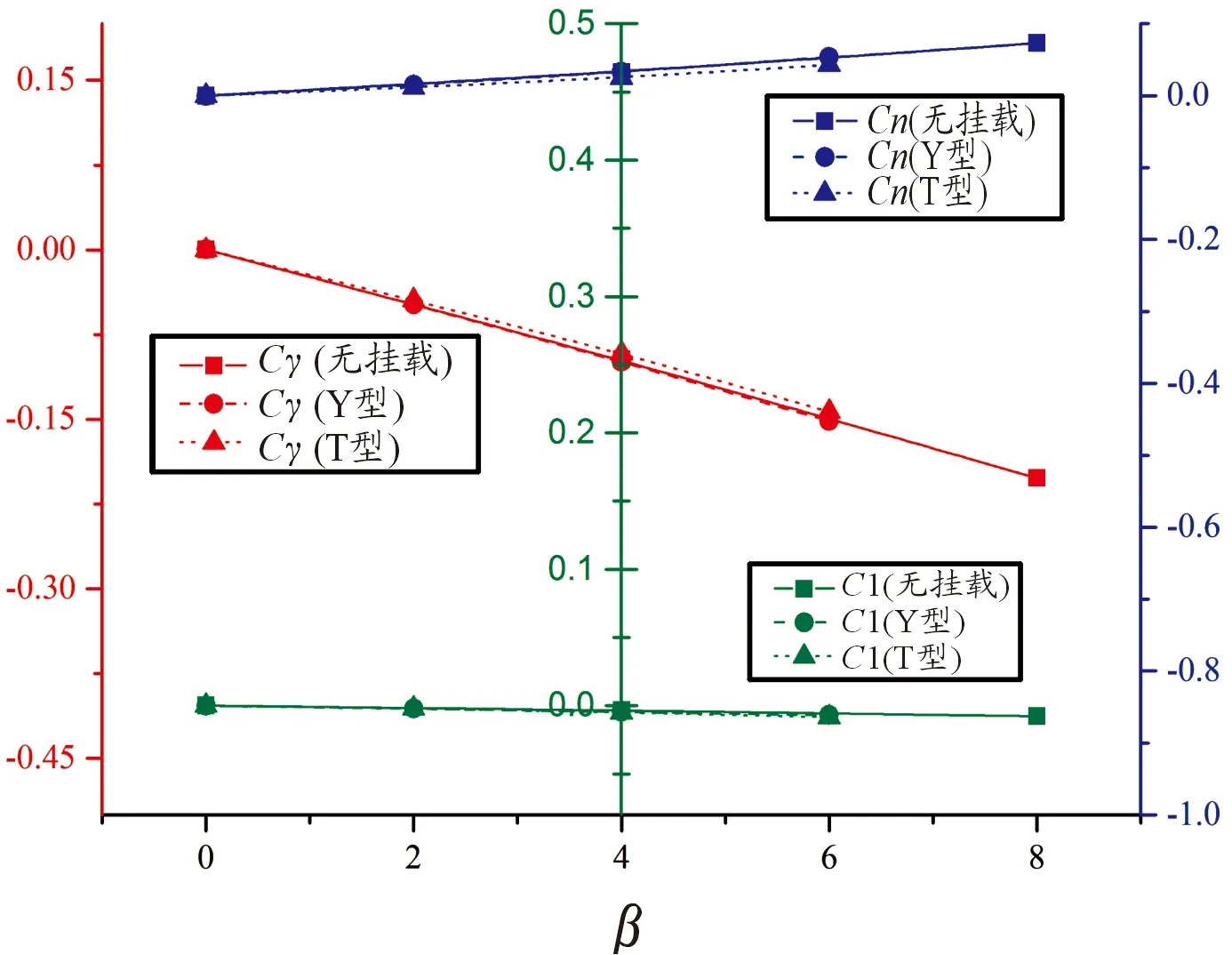
图6 不同侧滑角下侧力、滚转力矩、偏航力矩系数

表3 两种方案基本横向特性较原布局增幅统计
2.4 气动阻力统计分析
各特性参数中阻力系数的改变对飞行影响较大,因此本小节对两种方案各部件阻力进行统计分析。
分部件统计两个方案的阻力,主要分为3个部件:翼尖挂载结构,翼下挂载结构,剩余机体(除翼尖、翼下挂载结构外的其余部分),具体结果见表4所示。两种方案中,不同挂载结构本体阻力值相差不大,主要是不同挂架面积产生的摩阻差异;最主要的阻力差异来源于剩余机体,经分析认为,方案二布局翼下挂载时会与机翼之间形成一个压缩通道,影响机翼下翼面流场,增加机翼阻力。
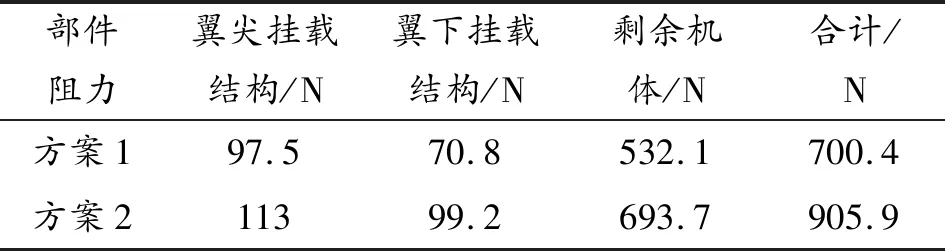
表4 分部件阻力统计
综合纵、横向气动特性对比分析,方案一布局(Y型)为较优的挂载方案。
3 结构刚强度分析
某型无人机机翼采用双梁式结构,且左右对称,主要靠金属梁框架结构承受飞行过程中产生的剪力和弯矩[13]。本次计算主要关注前梁、后梁、梁根部及翼尖连接处受力,因此仅截取机翼部分金属梁框架建立有限元模型进行受力分析。
前外梁、后外梁、加强肋、翼肋、翼尖挂架、翼下挂架材料为硬铝,红外增强器卡箍材料为45钢。材料性能参数见表5所示。
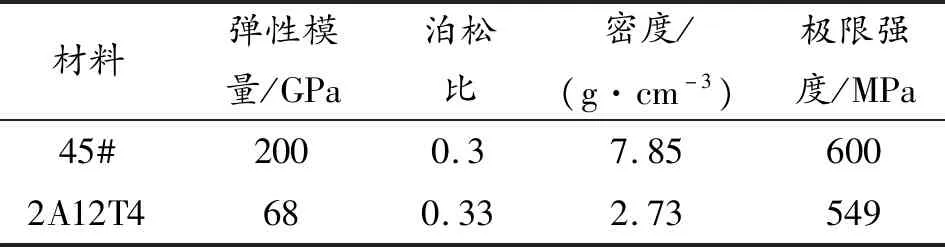
表5 材料力学性能参数
某型无人机采用火箭助推起飞,降落伞+减震气囊回收,在发射、回收过程承受较大过载,工况恶劣;飞行过程机翼上气动力与红外增强器重力方向相反,可部分抵消,过载系数小且平稳。因此仅对发射、回收工况进行校核。
发射瞬间无人机受力如图7所示,主要承受为火箭助推推力 、无人机发动机推力与无人机重力共同作用;着陆瞬间过载系数为10。

图7 发射瞬间无人机受力分析示意图
有限元模型中,外梁、后外梁与中梁部分使用MPC和接触模拟实际螺钉连接;翼下挂架使用Tie绑定模拟粘接。
发射瞬间过载作用下结构的有限元静力计算结果如图8所示。梁框架结构最大应力为196.3 MPa,最大应力位于后梁与翼尖挂载架连接处;最大位移为11.99 mm,最大位移位于翼尖红外增强器挂架上(见图9)。

图8 结构应力分布
着陆瞬间10g过载作用下结构的有限元静力计算结果如图10所示。梁框架结构最大应力为208.6 MPa,最大应力位于后梁与后中梁连接的根部螺栓孔处;最大位移为20.49 mm,最大位移位于翼尖红外增强器挂架上(见图11)。

图10 结构应力分布图
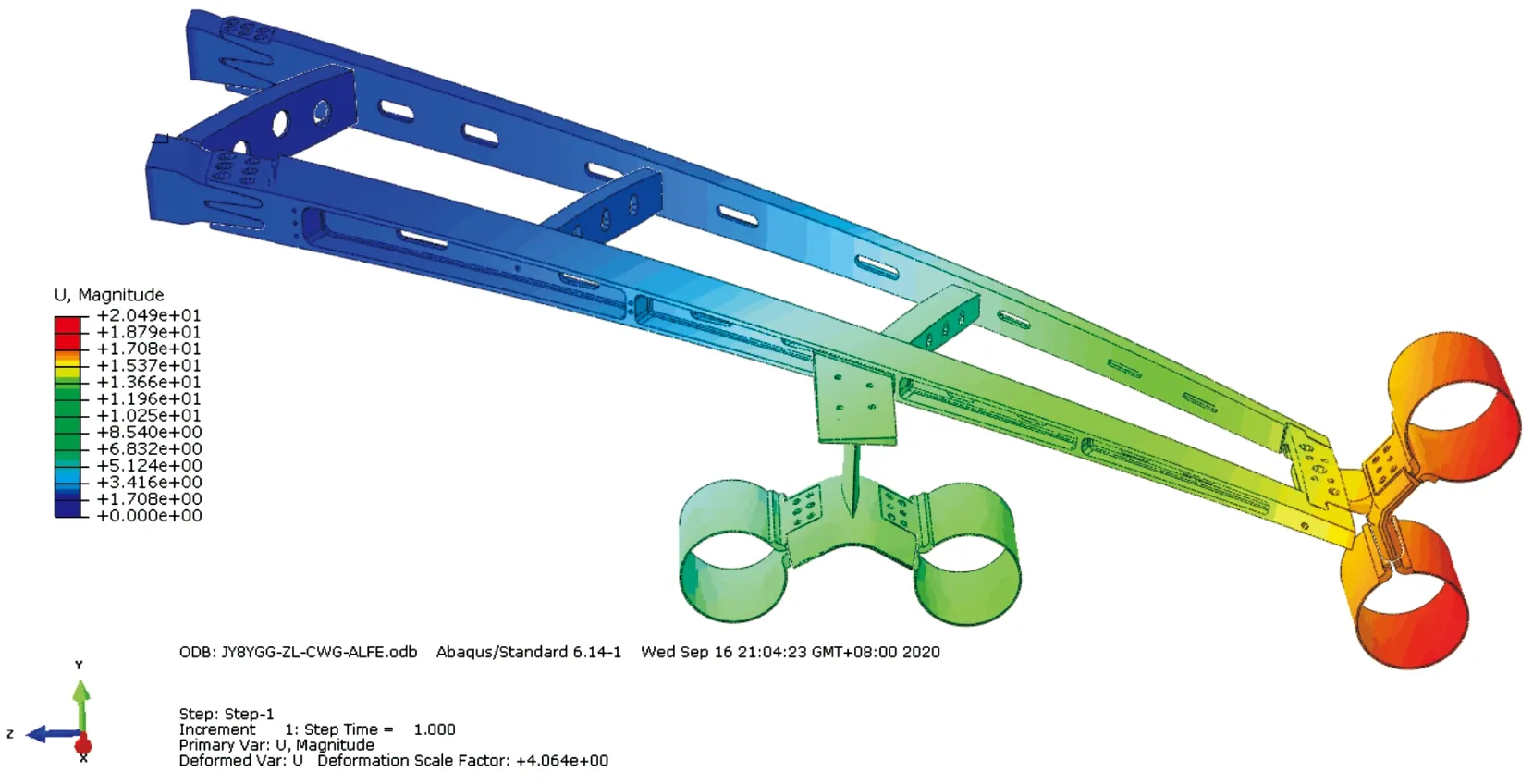
图11 结构位移分布图
挂载结构中,红外增强器卡箍为C型薄壁件,主要靠拧紧收口处的螺钉固定红外增强器,刚度较差,因此与其他结构件之间存在一定的位移跨度。上述两种工况作用时间较短,结构件未产生塑性变形时,不会对飞行性能产生影响,位移不是重要考核项。
由表6统计数据可知,机翼梁、挂架及其连接件安全系数均在1.5以上,设计强度满足使用要求。

表6 强度校核结果汇总表
4 飞行验证
将机翼按照方案一布局(Y型)改制完成后,某型无人机在外场进行了多个架次的供靶飞行。无人机飞行过程姿态平稳,能够按照预定航向稳定飞行;可根据地面指令要求执行爬升、俯冲、盘旋等动作。无人机发射、回收过程安全,单架无人机可进行多架次复飞。图12、图13为某架无人机实飞过程的姿态、速度、高度数据曲线。
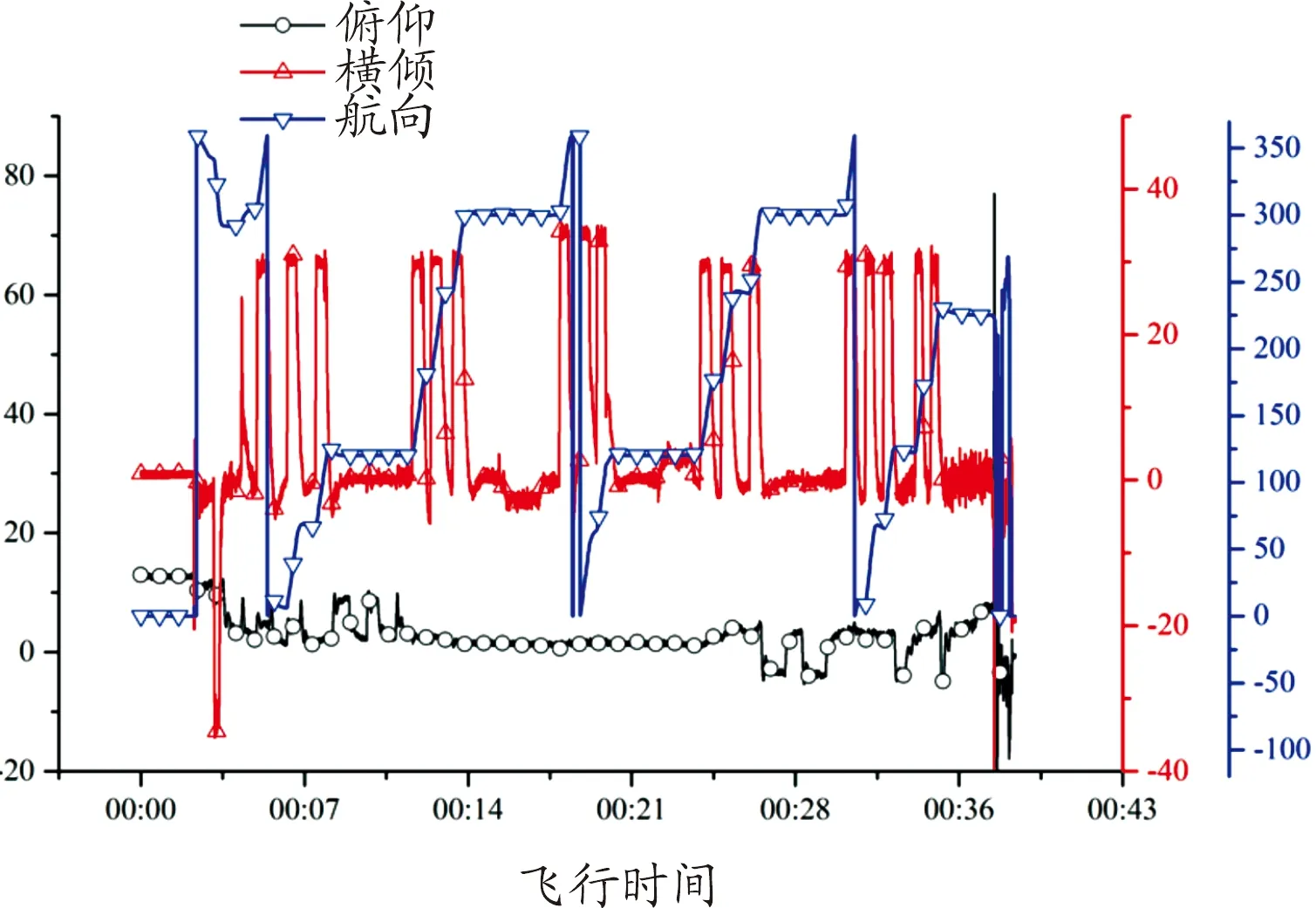
图12 无人机姿态、航向曲线

图13 无人机速度、高度、转速曲线
在发动机转速、高度基本相同情况下,分别截取不同编号某型无人机无外挂载荷、挂载八枚红外增强器状态部分实飞数据,如图14、图15所示。
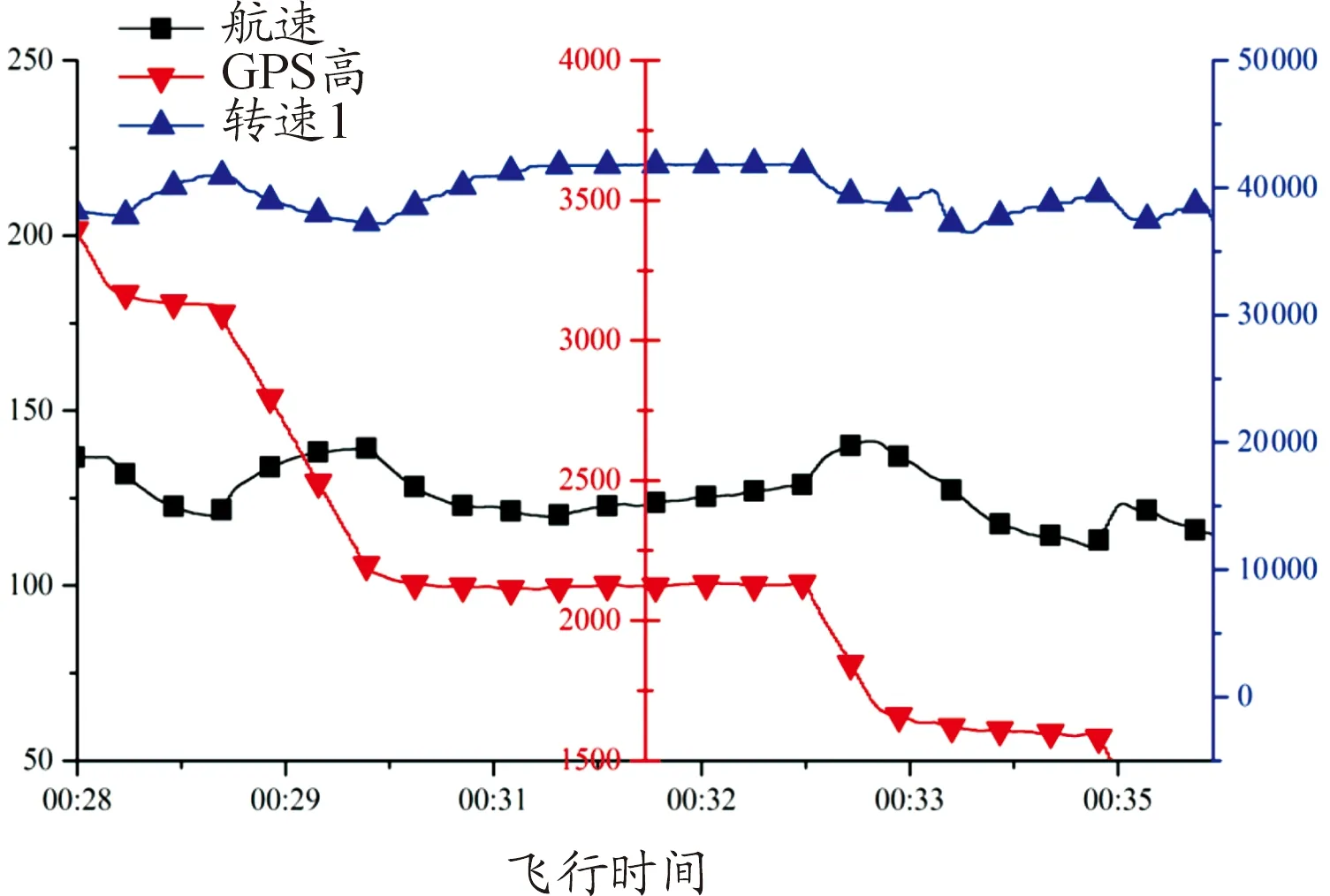
图14 无人机挂载八枚红外增强器状态飞行曲线

图15 无人机无挂载状态飞行曲线
某型无人机两种状态下飞行参数如表7所示。

表7 飞行参数
无人机在一定高度和速度下进行定直飞行时,发动机推力和气动阻力相等,即:
(2)
上述两架次无人机飞行高度、发动机转速基本相同,即推力基本相等,根据式(2)可推出实飞条件下无人机挂载八枚红外增强器状态相对于无载状态阻力增加72%。
第2节中两种状态阻力系数计算公式分别为:
带载:
Cd=0.000 6α2+0.001 5α+0.041 9
(3)
无载:
Cd=0.000 6α2+0.000 9α+0.028 8
(4)
代入表7中对应的配平攻角,得到带载相对于无载状态的数值仿真计算阻力增加量为56.8%。与推阻平衡推出的结果相比,两者误差为21.1%。考虑到无人机理论与实际外形以及不同发动机之间的状态差异,上述误差在可接收范围内。
5 结论
1) 本研究针对特定任务需求在某型无人机机翼翼下新增挂点并设计了Y型、T型两种红外增强器挂载结构;
2) 利用CFD数值模拟技术对某型无人机两种红外增强器布局进行了气动计算,根据计算结果对两种布局的基本纵向、横向特性进行了分析,选定较优方案;
3) 利用FEM技术对选定的挂载结构发射、回收工况进行强度校核,根据计算结果统计了各零件的最大应力,得到了相应安全系数,该结构满足使用要求;
4) 改制后无人机进行了多架次供靶飞行,飞行数据及实际情况验证了分析结果的有效性;
5) 本文对无人机定制化过程中的改制方案评估具有指导意义。
猜你喜欢
红外技术(2022年12期)2022-12-24 02:31:38
红外技术(2022年8期)2022-08-23 03:23:58
红外技术(2021年9期)2021-10-08 01:25:24
中国民航大学学报(2021年4期)2021-09-26 01:03:36
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
实验流体力学(2017年5期)2017-11-07 10:06:35
北京航空航天大学学报(2016年4期)2016-02-27 06:32:19
西北工业大学学报(2015年4期)2016-01-19 03:31:26
航空学报(2015年4期)2015-05-07 06:43:28
振动、测试与诊断(2014年5期)2014-03-01 01:14:27
