
非对称头部运动体低速垂直入水试验研究
2021-04-09 11:00:20于海月介百冰黄振贵陈志华唐楚淳
兵器装备工程学报 2021年3期
宋 立,于海月,介百冰,黄振贵,陈志华,唐楚淳
(南京理工大学 a.机械工程学院; b.瞬态物理国家重点实验室, 南京 210094)
入水问题广泛存在于自然和工程领域。国内外学者从不同的角度对入水问题进行了深入的研究。黄超等[1]对球体低速入水过程中空泡的变化进行了研究,得出了小球入水之后的5种动力学行为的变化过程和这些行为与韦伯数的关系。Wei等[2]利用高速相机记录了球体入水空泡形态的演变过程,并计算了球体入水速度变化情况,给出了预测球体入水速度的公式。Truscott等[3]较为全面的概括了关于入水问题国外学者所进行的大量实验、理论与数值分析;路丽睿等[4]对不同头型弹头低速倾斜入水空泡和弹道特性进行了研究,得出了入水空泡随头部锥角的变化规律和锥角头型射弹的速度随锥角的变化规律,对入水射弹的设计具有一定的参考意义;王瑞琦等[7]对平头运动体入水空泡闭合和不同头型运动体低速入水进行了研究,得出平头运动体低速垂直入水空泡深闭合和表面闭合所产生的射流对于运动体速度和加速度的影响,对建立精准的空泡模型奠定了基础。何春涛等[10]对圆柱体低速入水过程中空泡的演变过程进行了研究,同时通过对比试验分析入水速度对入水空泡闭合方式的影响,并在单个弹体入水的基础之上开展了两个弹体串列和并列入水试验,分析了多个空泡与空泡之间的影响,以及空泡对弹体稳定性的影响。
随着研究的深入,科研人员逐渐开始关注特殊入水弹道的研究,王云等[12]就反复入水弹道中高速入水无控弹道进行了模型实验研究,对比分析了头型、入水角、入水速度对入水弹道特性的影响,并对其产生的机理进行了阐述,并通过实验研究证实了反复入水机制的可行性,所得结论为跨介质航行器的设计提供理论参考;陈诚等[13]对预置舵角下超空泡航行体倾斜入水弹道特性进行了研究,开展了预置舵角下超空泡航行体入水角为 20°时的试验,并分析了不同预置舵角对航行体弹道的影响,为航行体入水初期形成稳定弹道和保证运动体的机动性提供了借鉴;时素果等[14]对预置舵角下超空泡航行体运动过程弹道特性进行了研究,为航行体在超空泡状态下航行时的机动性和弹道稳定性的研究提供了借鉴;袁绪龙等[15]对预置舵角对高速入水弹道和流体动力的影响进行了深入研究,表明预置舵角可以控制弹道转平,且预置舵角越大弹道越容易转平,为形成水下弯曲弹道提供了理论基础。华扬等[16]为利用非对称头部航行体快速转平优点,对其斜入水时的入水空泡和弹道进行了初步的实验研究。由文献可知,非对称头部运动体以一定初速度入水会形成弯曲弹道。弯曲弹道是远程巡航导弹形成反复入水弹道的一个重要环节。非对称头部运动体入水过程中空泡的形成、发展和演变对其自身入水后的运动特性有显著影响,而空泡演变又受到运动体头型的显著影响,因此关于运动体头型对非对称头部运动体入水后的空泡演变、速度变化以及如何形成弯曲弹道的机理研究显得尤为迫切而必要。本文针对不同斜切角度的非对称头部运动体低速垂直入水进行了试验研究,并采用高速摄像机对运动体垂直入水的过程进行了记录。基于试验结果,分析了五种不同斜切角的非对称头部运动体入水后空泡的形成、演变规律和速度变化规律;最后分析了以不同入水初速度入水的同一运动体入水后的速度-时间变化规律。
1 试验装置与模型参数
试验装置如图1所示,主要由玻璃水槽、高速摄像机、计算机、光源、长直导管、支架、底部防护层组成。
图1 试验装置示意图
水槽尺寸为500 mm×250 mm×250 mm,水槽底部设置有防护层,拍摄背景为每小格尺寸为5 mm的方格纸。试验中电脑与Phantom高速摄像机相连,控制拍摄与运动体下落同步,运动体垂直下落用长直导管控制,采用平行光源照明,高速摄像机的拍摄速度为4 000帧/s。试验用水采用自来水。
运动体的尺寸与弹头形状如图2所示,运动体材料为普通碳素钢,密度为7 g/cm3,直径7 mm、长度35 mm,头部斜切角度分别为5°、10°、15°、20°、25°。
图2 运动体示意图
2 试验
开展了弹头斜切角度分别为5°、10°、15°、20°、25°的5种非对称头部运动体在两个不同初速度下低速垂直入水的试验。本试验的误差主要来源于运动体是否垂直入水,为了解决这一问题本试验对每个不同头型的运动体都进行了10次以上的重复试验,从中选取了多组最好的实验数据,以保证试验的精度和可重复性,如图3为同一实验条件下10°弹丸垂直入水的两次重复试验曲线。
图3 10°弹丸重复试验速度曲线
将运动体的整个运动过程分为自由下落阶段、入水流动形成阶段、开空泡阶段、空泡闭合阶段和运动体带空泡运动阶段以及空泡破坏后的运动阶段。自由下落阶段为运动体在空中做自由落体运动到运动体头部接触到水面的整个过程;入水流动形成阶段为运动体尖部接触水面到运动体的非对称部分完全入水的这一过程;开空泡阶段是指从非对称部分完全入水开始,空泡逐渐扩张,直到空泡在某一时刻开始收缩;空泡闭合阶段为空泡开始收缩到空泡闭合缩断;运动体带空泡运动阶段为空泡闭合缩断后运动体带空泡继续向下运动直到运动体尾部撞击空泡使得空泡破灭。本文以运动体头部接触水面时刻作为t=0的时刻。
3 斜切角度对入水空泡演变和运动过程的影响
对5种头部非对称度不同的运动体进行两种不同入水速度v0和v1下的低速垂直入水实验,分别选取8个时刻的空泡形态进行分析。
3.1 工况1:入水速度为v0=3.82 m/s
图4(a)、(b)、(c)、(d)、(e)分别是斜切角为5°、10°、15°、20°、25°的非对称头部运动体以3.82 m/s的初速度入水后的空泡图像。
由图4可知,5种运动体在入水后都分别发生了类似于表面闭合的空泡闭合现象。并且都经历了入水流动形成阶段、开空泡阶段、空泡闭合阶段、运动体带空泡运动阶段和空泡破坏后的运动阶段。
图4各图像中0-10 ms为各头型运动体开空泡阶段。这一阶段中,在运动体头部入水之后,其产生的空泡的壁面向四周扩张,液面上方产生一层环状水幕。随着斜切角度的增大,运动体入水后在水面上所产生的水幕更为明显。同时各头型运动体的空泡显现出不同程度的非对称性,且随着运动体斜切角度的增加,空泡的不对称程度也在增加。
如图4所示,斜切角分别为5°、10°、15°、20°、25°的5种不同非对称头部运动体分别在15 ms、10 ms、15 ms、15 ms、20 ms处发生了类表面闭合。
对于5°运动体来说,其入水之后,在10~20 ms时间内产生了一条细长的空泡,并在25 ms时空泡断裂为2个部分,向上的一部分随着运动体运动逐渐消失,随运动体一起运动的部分,由于运动体尾部对于空泡的破坏逐渐破灭,同时也伴随着大量向上运动的小空泡产生。
10°、15°、20°的运动体在发生类表面闭合后,分别在15~25 ms、15~20 ms、15~20 ms的时间段内发生了运动体带空泡运动的运动过程,在这一过程中,空泡的形态逐渐发生变化,其不对称性越来越明显,且随着运动体的非对称度越大,这种变化越为明显。接着3种运动体分别在 25 ms、20 ms、20 ms时刻,运动体尾部开始撞击空泡壁面,并在这一瞬间完成了对于空泡的破坏,这3种运动体从类表面闭合到空泡破坏分别经历了10 ms、5 ms、5 ms。10°运动体在发生空泡破灭之后,其尾部在25~35 ms的整个运动过程之中不断产生向上运动的小空泡,并且原来包裹运动体的空泡随着运动体的不断倾斜而脱落。15°、20°的运动体在发生空泡破坏之后,未被破坏的空泡部分继续包裹着运动体的其余部分部分向下运动,同时运动体的尾部在水中又产生一个较大的空泡,在35 ms时可以看到运动体头尾两个部分分别带有空泡。
25°的运动体相对于其他非对称头部运动体来说,其类表面闭合和运动体尾部撞击空泡壁面几乎在20 ms时同时发生。并且在原有空泡遭到破坏之后,其尾部产生了较15°、20°运动体更为显著的空泡。
3.2 工况2:入水初速度为v1=4.42 m/s
图5所示为五种不同斜切角的非对称头部运动体在入水初速度为v1时低速垂直入水后的空泡图像。由图可知5种运动体运动过程与工况一时各头型运动体经历的运动过程有很大的相似性,即他们都拥有运动体入水后的6个运动过程。并且各个运动阶段的空泡演化也有很高的相似性。
在工况二的情况下,对5种不同斜切角的运动体的空泡演化做对比。由图5(a)、(b)、(c)、(d)、(e)可知,各不同头型运动体在0~10 ms内完成开空泡。5°运动体在10~15 ms内作运动体带空泡运动直至空泡壁破灭,15 ms之后由于空泡破灭产生大量向上运动的小空泡;10°运动体在10 ms时刻空泡表面闭合,10~5 ms内做运动体带空泡运动,并且空泡逐渐向右扩张,15 ms之后空泡破灭;15°运动体在11 ms时刻发生表面闭合,此时运动体空泡有了明显的不对称,在11~20 ms,运动体带空泡运动,这一过程中空泡的不对称程度增加,且相对于10°运动体其空泡向右的扩张程度更大;20°运动体在15 ms发生表面闭合,在17.5 ms运动体尾部撞击空泡壁,空泡向右扩张;25°运动体在20 ms空泡表面闭合,并在同一时刻,运动体尾部撞击空泡壁。
由以上分析可知,运动体入水初速度为v1时,随着运动体头部斜切角的增大,运动体发生空泡表面闭合的时刻越来越迟,同时空泡闭合和空泡破灭的时间间隔越来越小;随着斜切角的增大,空泡的不对称性越强,空泡向右的扩张更为明显。
4 斜切角度对速度变化的影响
图6给出了运动体在不同入水阶段的受力分析,O为质心,G为重力,F1为斜截面所受冲击力,F1x、F1y分别为F1的水平和竖直分量,F2为浮力,β为竖直分量与冲击力F1的夹角,其大小与斜切角α相等。
分别对运动体入水初速度为v0=3.82 m/s和v1=4.42 m/s的两个组别的运动体的速度随时间的变化过程进行了拟合分析,得到了如图7和图8的速度曲线。
4.1 v0时的速度变化曲线
图7为入水初速度v0时,各种非对称头部运动体的速度曲线。由曲线分析可知在运动体入水后平稳运动的同一时刻,5°、10°、15°、20°、25°的运动体的速度依次变小。更为显著的特征是,各种运动体的速度的变化率,即加速度区别较大,5°运动体的速度衰减先慢后快,即加速度先小后大;10°运动体的速度衰减先慢后快;15°运动体变化率较为平稳,基本保持同一变化率;而20°和25°运动体的速度衰减都表现为先慢后快,25°的加速度相比20°更大。主要原因是运动体撞击水面时,受到了水面的方向垂直于斜截面的冲击力F1,其水平分力F1x产生一个顺时针的力矩,使得运动体头部发生向左的偏转,当运动体被空泡完全包裹时,只有斜截面与水接触,此时弹丸受到重力G、浮力F2,以及冲击力F1。由于弹丸的质量主要集中在圆柱体部分,故五种运动体的质量近似相等,又因运动体为实心,所以5种运动体的重力与分力的合力近似相同。由简单计算知,虽然随着斜切角的增大,运动体的斜切面积在增大,因此F1增大,但五种运动体的冲击力的竖直分力相等,仅水平分力在增大。因此水平冲击力对弹丸的姿态起主要作用,又随着斜切角α增大,β逐渐增大,则F1x增大。所以斜切角越大,运动体倾斜程度越大,则所受阻力越大,速度衰减越快。同时,注意到加速度大幅变化于20 ms前后,再结合之前的运动体水中运动过程的分析可知,运动体在弹尾碰撞空泡壁前后,速度衰减有显著变化。
图7 初速度为v0五种运动体的v-t曲线
4.2 v1时的速度变化规律及分析
图8所示为初速度v1=4.53 m/s时,各种非对称头部运动体的速度曲线。在空泡发生表面闭合之后到空泡未破灭之前,也就是10~20 ms的时间段,可以看到随着运动体斜切角增大,运动体速度衰减的加速度依次增大,速度衰减量依次增大。其原因与初速度为v0时相似。
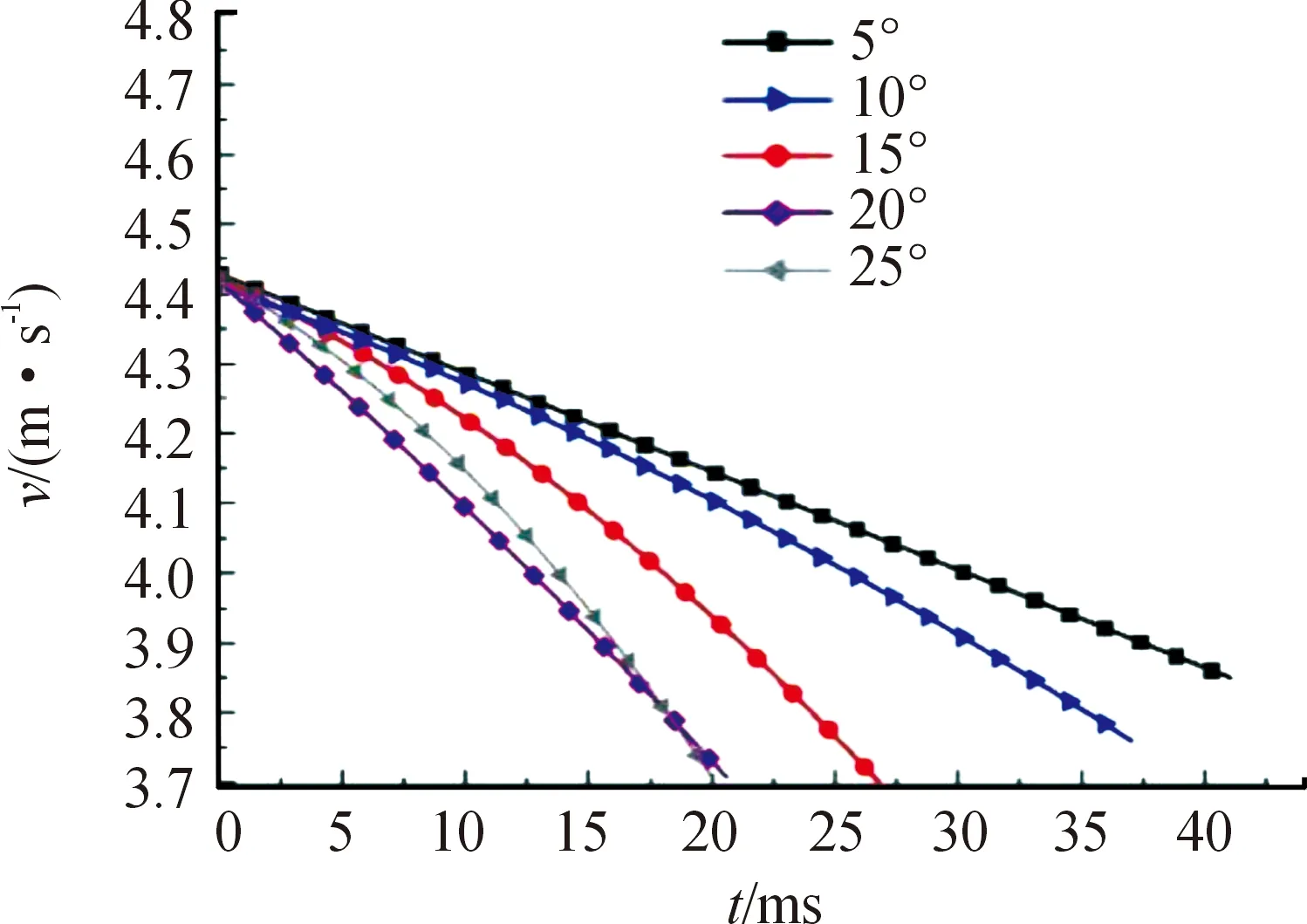
图8 初速度为v1五种运动体的v-t曲线
5 不同入水初速度下非对称头部运动体低速垂直入水的分析
1) 空泡的演变
这里主要取斜切角为10°的非对称头部运动体在不同入水初速度下的运动变化过程来说明不同初速度对非对称头部运动体垂直入水后的影响。
图9(a)、(b)分别为弹头非对称度为10°的运动体分别在初速度分别在v0和v1时入水的运动过程。当运动体初速度为v0时,运动体在t=10 ms时发生类表面闭合,在25 s时运动体尾部撞击空泡壁面。当运动体初速度为v1时,运动体在t=11.75 ms时发生类表面闭合,在18.75 ms时运动体尾部撞击空泡壁面。这种差别在5°、15°、20°、25°等的组别上都有不同程度的体现。可以看出初速度越大,其运动体姿态更容易发生倾斜,运动过程更不稳定。
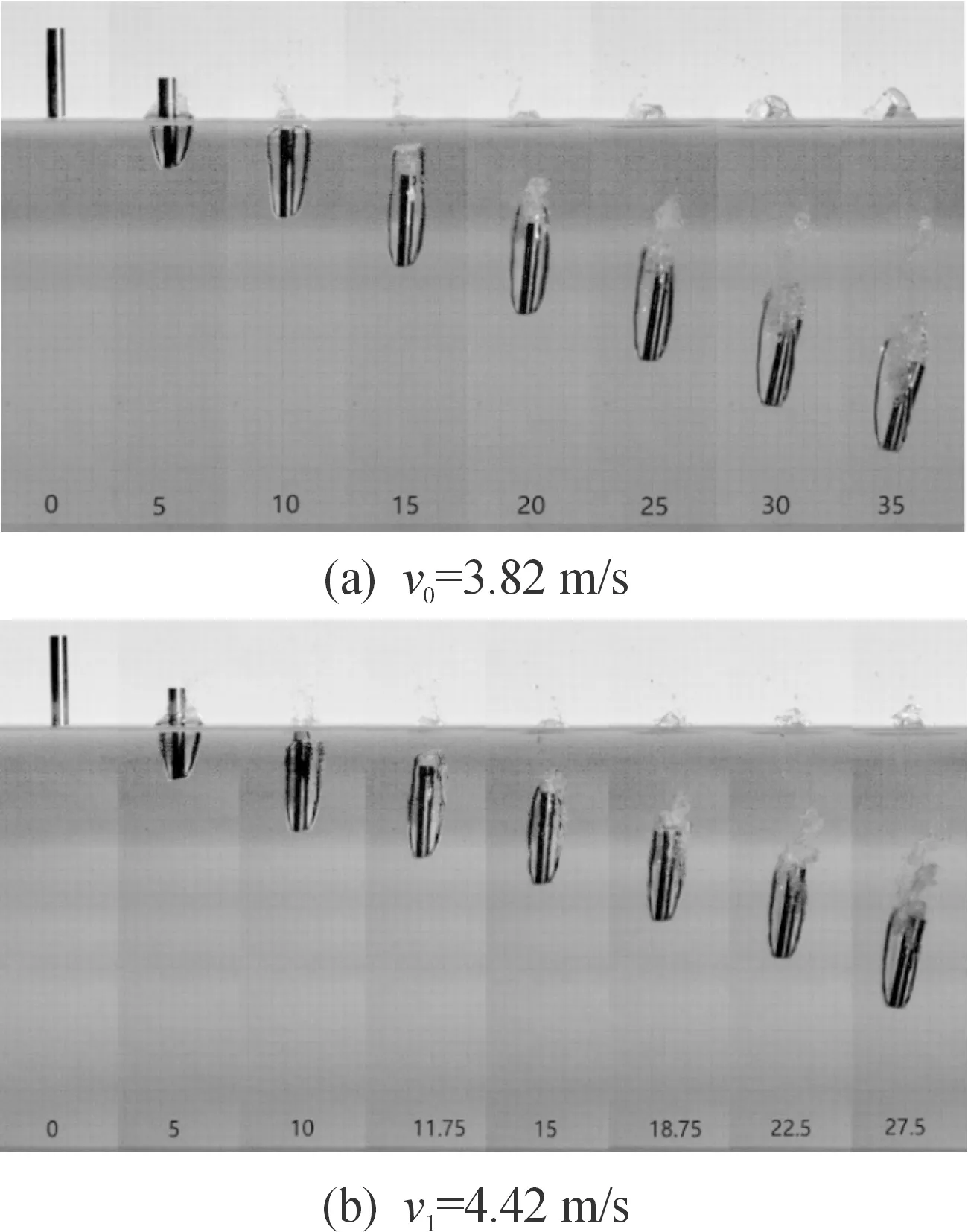
图9 弹头非对称度为10°的运动体在不同初速度下的入水过程
2) 速度的变化
表1所示为五种头部运动体在两种入水初速度下入水后40 ms内的速度衰减量。从表中可以看出,初速度为v1时,5种运动体在40 ms内的衰减量都是大于其各自在入水初速度为v0时入水40 ms内的速度衰减量,并且随着运动体弹头的角度的增大,这种差距在逐渐增大。因此,可知运动体的入水初速度越大,其在入水后相同时间内的速度衰减量越大;运动体头部的非对称度越大,相同初速度入水后的相同时间内的速度衰减量越大。
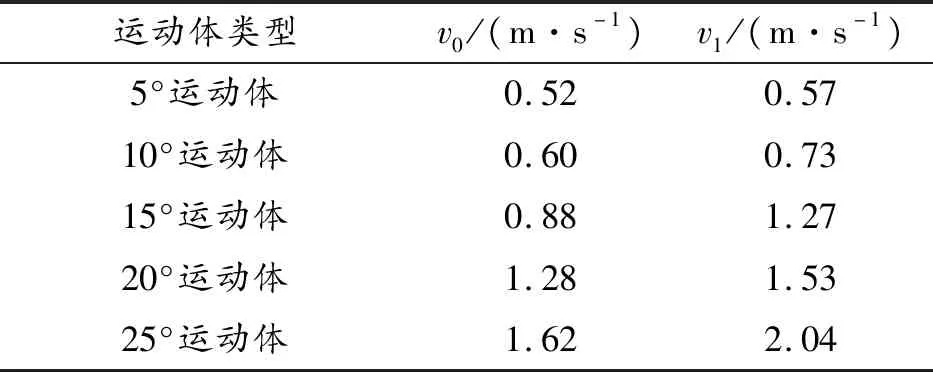
表1 不同运动体在初速度v0、v1 40 ms内的衰减量
6 结论
1) 随着运动体头部的斜切角的增大,运动体入水后所形成的空泡的形态变化更快,运动体姿态的越不稳定,空泡壁更早被破坏。
2) 入水初速度对于入水空泡形态与运动体的运动轨迹以及姿态影响较大,随着运动体入水初速度的增大,运动体的姿态更容易倾斜,运动体更容易失稳。
3) 运动体头部斜切角越大,运动体的速度衰减越快;运动体头部非对称度越大,相同初速度入水后相同时间内的速度衰减量的差值越大。
猜你喜欢
包装工程(2023年16期)2023-08-25 11:36:06
数字海洋与水下攻防(2021年2期)2021-05-08 08:01:26
客车技术与研究(2019年1期)2019-02-25 08:08:48
制造技术与机床(2018年10期)2018-10-13 06:36:58
西南交通大学学报(2016年6期)2016-05-04 04:12:46
系统工程与电子技术(2016年2期)2016-04-16 05:17:00
船海工程(2015年4期)2016-01-05 15:53:28
中学生理科应试(2015年7期)2015-12-28 03:48:52
采矿与岩层控制工程学报(2015年3期)2015-12-16 19:20:42
计算物理(2014年1期)2014-03-11 17:00:22
