
基于IHHO算法的光伏电池工程模型的参数辨识
2021-04-07 03:08吴忠强刘重阳
计量学报 2021年2期
吴忠强, 刘重阳
(燕山大学工业计算机控制工程河北省重点实验室,河北秦皇岛066004)
1 引 言
建立光伏电池的模型是研究光伏发电的理论基础[1~3],由于光伏电池具有很强的非线性输出特性,其模型建立和参数辨识一直是亟待解决的难题[4,5]。
近年来,在光伏电池的参数辨识方面,智能优化算法得到越来越多的应用。徐明等[6]提出一种改进灰狼优化算法(improved grey wolf optimization algorithm, IGWO)应用于光伏电池模型的参数辨识。该算法通过引入S型函数非线性地调整控制参数,以一定概率对决策层个体实施反向学习策略,避免群体出现早熟收敛,但该算法复杂,优化过程繁琐,寻优时间过长。徐岩等[7]提出一种基于混合蛙跳算法的光伏阵列参数辨识方法,该算法的更新策略具有方向性,有较强的局部搜索能力,可有效解决算法易早熟的问题,但算法的求解步骤相对复杂,求解时间长。Jian X Z等[8]提出了一种Logistic混沌JAYA算法,并应用于光伏电池模型的参数辨识。该算法的更新阶段引入了Logistic混沌映射策略,提高了种群多样性,同时在搜索阶段中引入混沌变异策略,平衡算法的探索能力和开发能力,但在算法后期还是容易陷入局部最优。
目前使用最多的光伏电池的机理模型是一类超越函数,其较难求解[9]。因此,希望找到一种能在多种环境条件下,准确地模拟出光伏阵列运行状态的简化工程模型[10],以便快速求解出光伏电池的各种运行状态。
彭湃等[11]建立了基于物理特性的光伏电池工程数学模型,分析了在不同的太阳辐射强度、环境温度下的输出特性,此模型的灵活性很强,通过改变模型的参数和补偿系数可模拟出不同类型的光伏电池。傅望等[12]结合光伏电池输出特性和质点平抛运动轨迹的相似性,在原有光伏电池工程模型的基础上,提出了一种更便于计算的光伏电池工程模型。该模型的特点是,用在3个不同重力场下质点的平抛运动轨迹来代替光伏电池输出特性曲线,通过调节分界点的位置,在不同环境条件下,使模型最大功率点附近的误差尽可能小。文献[3]对光伏电池分别建立基于物理特性和基于外特性的工程模型。分析对比两种工程模型得出:基于物理特性的工程模型的精确度较高,但参数计算想对复杂;而基于外特性的工程模型的精确度不高,但参数较少,计算相对简便。
哈里斯鹰优化算法(harris hawks optimization algorithm, HHO)[13]是2019年提出的一种新型群体元启发式优化算法。HHO算法设计过程相对简单,局部最优问题也得到了一定的解决,算法整体的搜索能力优异。然而算法在保证寻优精度的情况下会导致寻优时间增长,并且该算法局部搜索不够灵活。针对上述不足,本文引入柔性递减策略,在迭代初期扩大全局搜索范围,在迭代后期延长局部搜索时间,加强了初期的全局搜索能力和后期的局部搜索能力;引入黄金正弦法,增加了种群的多样性,减少算法陷入局部最优的可能性,并且缩小了搜索空间,提高了寻优效率。将改进的哈里斯鹰优化算法(improved harris hawks optimization algorithm, IHHO)用于光伏电池工程模型的参数辨识中。将IHHO算法辨识结果同厂家提供原始数据的计算结果以及PSO、ALO、GWO和HHO算法辨识结果进行对比,IHHO算法辨识结果与实验测得数据更为匹配,拟合度更高,这表明IHHO算法能够对光伏电池工程模型进行准确的参数辨识。
2 光伏电池模型
2.1 光伏电池的数学模型
利用光生伏特效应原理,光伏电池在光照强度一定时,每片光伏电池可以看作是一个恒流源与一只正向二极管的并联回路,其等效电路模型的典型形式是单二极管形式,如图1所示。
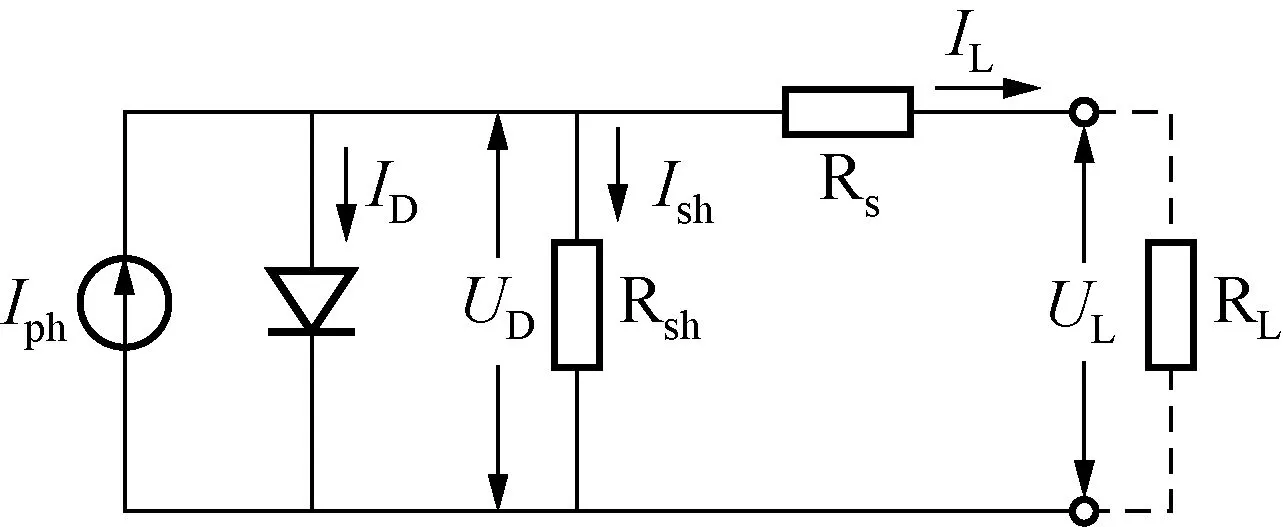
图1 光伏电池的单二极管等效电路Fig.1 Single diode equivalent circuit of photovoltaic cell
其I-V特性方程为
(1)
式中:IL为光伏组件的输出电流;UL为光伏组件的输出电压;Iph为光伏组件内部的光生电流;Io为光伏组件无光照时的饱和电流;Rs为光伏组件的串联电阻;Rsh为光伏组件的并联电阻;q为电子电荷(1.602×1019C);n为二极管品质因子;k为玻耳兹曼常数(1.38×10-23J/K);T为光伏组件在某种工况下的绝对温度。
2.2 光伏电池的工程模型
光伏电池模型式(1)相对复杂,式中右侧函数中还包含电流IL,是超越方程,求解起来比较困难。实际应用中,在保证工程精度的前提下,针对实际环境,可将上述模型简化为便于求解的四参数工程模型,利用厂家提供的原始数据,即标准测试条件下的开路电压Uoc、短路电流Isc、最大功率点电压Um、最大功率点电流Im进行快速求解。为此,对式(1)做两项近似[3]:
(1)因为光伏电池内部并联电阻Rsh阻值较大,(UL+RsIL)/Rsh远小于光生电流,所以可忽略它的影响。
(2)通常状况下Rs远小于二极管正向导通电阻,可认为Iph=Isc。则式可简化为:
(2)
当光伏电池在最大功率点时,由IL=Im,UL=Um及e(Um/C2Uoc)≥1可得:
(3)
当光伏电池开路时,由IL=0,UL=UOC及e(1/C2)≥1可得:
(4)
将厂家提供的原始参数数据代入到式(4)求出C2的数值,再将C2代入到式(3)求出C1的数值,然后将C1和C2代入式(2),即可得到在标准条件下光伏电池的输出特性曲线。
输出特性曲线也会随着光照强度和温度的变化而变化,因此,当光照强度和温度发生变化时,需要根据生产厂家提供的标准测试条件下的原始数据,对光照强度和温度的变化量加以修正,从而获得新工况下的输出特性曲线。即:
ΔT=Tnew-T
(5)
(6)
式中:T为标准温度;Tnew为新工况下的温度;S为标准辐射照度;Snew为新工况下的辐射照度;ΔT为新工况和标准工况下的温度差;ΔS为相对辐射照度差。
然后,根据式(7)~式(10)计算新工况下的短路电流Isc_new、开路电压Uoc_new、最大功率点电流Im_new[3]、最大功率点电压Um_new:
(7)
Uoc_new=Uoc(1-γΔT)ln(e+βΔS)
(8)
(9)
Um_new=Um(1-γΔT)ln(e+βΔS)
(10)
式中:系数α=0.002 5 ℃,β=0.5,γ=0.002 88 ℃。
将新工况下的开路电压Uoc_new、短路电流Isc_new、最大功率点电压Um_new和电流Im_new代入式(2)~式(4)中,从而获得任意工况下的输出特性。基于上述光伏电池的工程模型,利用实际光伏阵列的串并联个数,即可建立光伏阵列的工程模型。
3 哈里斯鹰优化算法
Lefebvre L等[14]提出了一种通过观察进食行为来测量鸟类“智商”的新方法。根据哈里斯鹰合作探索猎物和多种攻击策略[14~17],可将哈里斯鹰优化算法分为两个阶段,即探索阶段和狩猎阶段。
3.1 探索阶段
在HHO算法中,哈里斯鹰是候选解,并且每一步中的最佳候选解被认为是预期的猎物或接近猎物的哈里斯鹰。哈里斯鹰根据两种策略随机栖息在一些地点等待发现猎物,由式(11)表示:

(11)
式中:p是选用栖息策略的机会,p<0.5时,鹰根据即将搜寻到猎物的其他家庭成员的位置而进行栖息;p≥0.5时,鹰选择在随机的大树上进行栖息从而等待猎物。X(t+1)是下一代中哈里斯鹰的位置向量;Xrand(t)是从当前种群中随机选择的鹰;X(t)是当前代中哈里斯鹰的位置向量;Xprey(t)是猎物的位置向量;Xm(t)是当前种群的平均位置向量;r1、r2、r3、r4和q均为(0,1)内的随机数;lb和ub表示变量的上下界。鹰群的平均位置由式(12)获得:
(12)
式中:Xi(t)表示第t代第i个鹰的位置,N表示鹰的总数。
3.2 狩猎阶段
HHO算法在狩猎阶段,会根据猎物的逃逸能量选择不同的追捕策略。在逃跑行为中,猎物的能量迅速减少。为了模拟这个事实,猎物的能量由式(13)表示:
E=2ωE0
(13)
式中:E表示猎物的逃逸能量;E0是其能量的初始状态;ω=1-t/T是初始能量的递减系数,T是最大迭代次数。
在HHO算法中,E0在每次迭代时在(-1,1)内随机变化。当E0的值从0增加到1时,意味着猎物的能量正在增强。逃逸能量E在迭代过程中有减小的趋势。当逃逸能量|E|≥1时,鹰搜索不同的区域以探索猎物的位置;当|E|<1时,HHO算法在狩猎阶段中尝试搜寻最优解。
根据猎物的逃逸行为和哈里斯鹰的追逐风格,HHO算法提出了4种可能的策略来模拟突袭。设r<0.5 代表猎物在突袭之前成功逃脱的机会,r≥0.5代表未成功逃脱的机会。为了使HHO算法能够在软、硬围攻过程之间切换,使用了E参数,当|E|≥0.5时,采取软围攻;而当|E|<0.5时,采取硬围攻。
3.2.1 软包围
当r≥0.5和|E|≥0.5时,猎物仍然有足够的能量,并试图通过一些随机性的误导性的跳跃来逃跑。这种情况可用式(14)来表示:
X(t+1)=ΔX(t)-E|JXprey(t)-X(t)|
(14)
式中:ΔX(t)是猎物位置和当前位置的差,由式(15)表示;J是猎物在整个逃生过程中的跳跃强度,在每次迭代中随机变化,以模拟猎物的运动性质,由式(16)表示。
ΔX(t)=Xprey(t)-X(t)
(15)
J=2(1-r5)
(16)
其中,r5是(0,1)内的随机数。
3.2.2 硬包围
当r≥0.5和|E|<0.5时,猎物精疲力尽,逃逸能量低。在这种情况下,使用式(17)更新当前位置:
X(t+1)=Xprey(t)-E|ΔX(t)|
(17)
3.2.3 快速俯冲的软围攻
当|E|≥0.5,但r<0.5时,猎物有足够的能量成功逃脱,但在突袭之前仍然构建了软围攻,并伴随着快速俯冲。
为了对猎物跳跃运动的逃逸模式进行数学建模,在HHO算法中使用了莱维飞行(levy flight,LF)概念。为了进行软围攻,根据式(18)的评估(决定)它们的下一步行动。
Y=Xprey(t)-E|JXprey(t)-X(t)|
(18)
然后,将这一动作的可能结果与之前的俯冲进行比较,以检测它是否是一个好的俯冲。如果不合理将使用式(19)基于LF的模式进行俯冲:
Z=Y+S×LF(D)
(19)
式中:D是维度;S是大小为1×D的随机向量。LF函数计算公式如式(20)所示:
(20)
鹰位置更新的最终策略由式(21)表示:

(21)
式中:F(X)是适应度函数;Y和Z分别由式(18)和式(19)获得。
3.2.4 快速俯冲的硬围攻
当|E|<0.5,但r<0.5时,猎物没有足够的能量逃跑,在突袭捕获猎物之前,建造硬围攻。在硬围攻条件下实施以下规则:

(22)
式中:P和Q分别为
P=Xprey(t)-E|JXprey(t)-Xm(t)|
(23)
Q=P+S×LF(D)
(24)
4 改进的哈里斯鹰优化算法
针对哈里斯鹰优化算法有时会陷入局部最优,在保证寻优精度的情况下会导致寻优时间增长,且搜索过程调整不够灵活,不能针对性的进行阶段性搜索,影响搜索精度等问题,对哈里斯鹰优化算法进行了两项改进。
(3) 微电网缺乏有效的控制手段。微电网的控制模式和策略是其维持运行的关键,主要包括主从、对等和综合性控制模式等[13]。主从控制的微电网,其规模受控于主控电源的容量;微电网的对等控制技术基本还在实验室阶段,还有很多问题需要解决;综合性控制模式如图3所示,大致参照大电网的分层控制模式。
4.1 柔性递减策略
HHO算法在狩猎阶段,猎物的逃逸能量E在迭代过程中有减小的趋势,原算法按线性递减的方式将初始能量递减到零。然而实际环境并非如此,应为初期快速递减后期慢速递减,最终至零,这种递减方式有利于算法在全局和局部搜索能力上的平衡。改进后的初始能量递减系数ω为
(25)
式中:ξ是柔性递减系数。
两种策略初始能量的递减系数随迭代次数T变化曲线如图2所示。
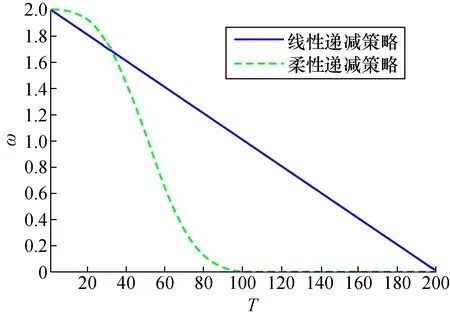
图2 初始能量递减系数变化图Fig.2 Change diagram of initial energy decline coefficient
由图2可知,相对于线性递减策略,改进后的柔性递减策略,在迭代初期的一段时间内,能保持一个较大值,以扩大全局搜索范围,使初期的全局搜索能力得到一定程度的加强。在迭代后期迅速缩减为一个较小值并一直保持,从而延长迭代后期的局部搜索时间,使局部搜索能力得到提升,并最终实现算法的精度提升。
4.2 黄金正弦法
在鹰的位置更新中引入黄金分割数以便缩小搜捕空间,使其更加靠近猎物的区域,可大幅度地提高搜索速度,使“搜索”和“开发”达到良好的平衡。正弦分割法由式(26)表示:
X(t+1)=X(t)|sinθ1|+θ2sinθ1|τ1Xprey(t)-τ2X(t)|
(26)
τ1=-π+(1-τ)×2π
(27)
τ2=-π+τ×2π
(28)
在HHO算法后期引入黄金正弦法,使个体迅速地进行信息交流,以获取最优个体(猎物)的位置信息,弥补了收敛速度慢的缺陷,同时增加了种群的多样性,可减少算法陷入局部最优的可能性,使算法精度进一步得到提升。
5 工程模型参数辨识中的应用
利用IHHO算法对光伏电池的工程模型进行参数辨识,实测数据从15个光伏电池串联的光伏阵列中获取。
5.1 目标函数的确立
(29)
式中:ILi,ULi分别为在某一工况下光伏电池的一组实测电流和电压值;x=(Isc,Uoc,Im,Um)是待辨识的参数值。待辨识的4个参数的取值范围如表1所示。
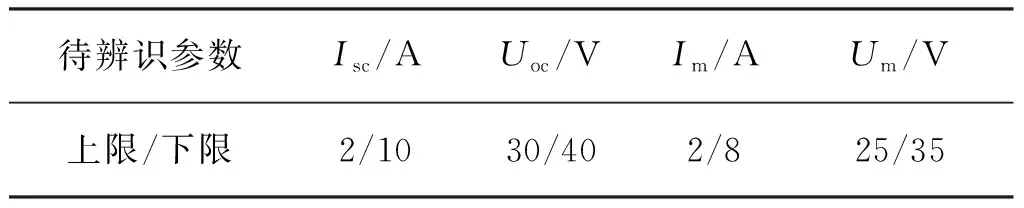
表1 参数范围Tab.1 Range of 4 parameters
根据式(29),确定目标函数(适应度)F(x):
(30)
式中:N为实测数据量总数,适应度值越小表示辨识参数越准确。
5.2 光伏电池的参数辨识结果
在实际应用中,根据厂家给出的原始数据及现时的条件,如辐照度和温度,采用前面的工程模型式(7)~式(10)进行修正,可得到符合实际情况的准确数据。将IHHO算法的辨识结果与HHO算法辨识结果、厂家提供原始数据及经修正的准确数据进行对比,结果如表2所示。
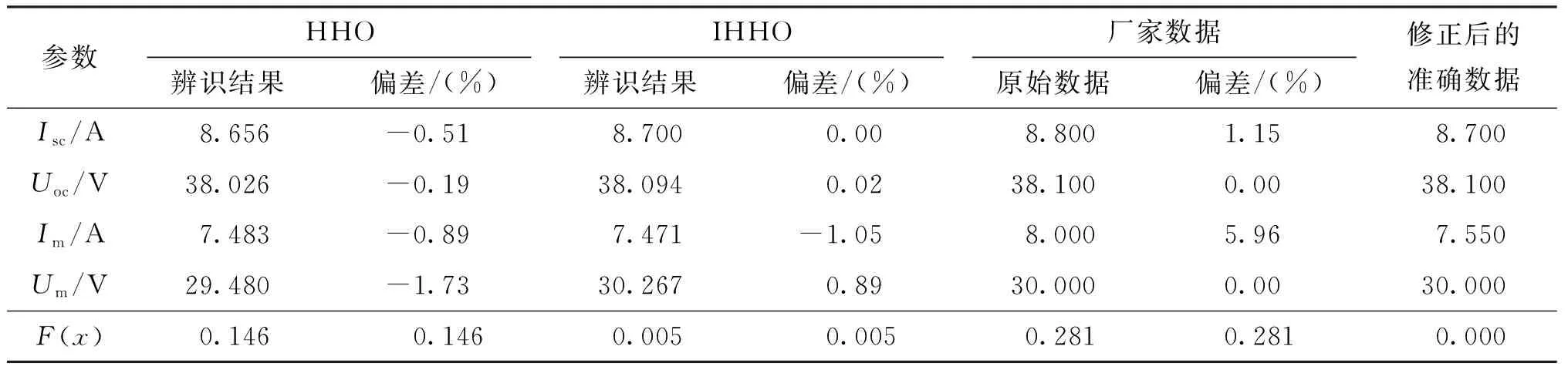
表2 对比结果Tab.2 Result of comparison
由表2可看出,在光伏电池的使用过程中,厂家提供的原始参数已经不能真实描述实际的电池参数,因部分参数的变化,导致F(x)偏差值较大,远远大于IHHO算法。HHO算法的辨识结果与IHHO算法的辨识结果数据相比也相差较大,F(x)偏差值相差近30倍。而IHHO算法的各参数辨识结果与实际结果偏差很小,表明IHHO算法的辨识结果与光伏电池实际运行条件下的参数值更为接近。
为进一步验证IHHO算法的辨识效果,将4组不同工况下的实测值,采用PSO、ALO、GWO、HHO和IHHO算法进行参数辨识,把辨识的参数值代入式(2)~(4)中,可得光伏电池的V-I特性曲线如图3所示,厂家数据的适应度值和各算法的适应度值如表3所示。
由图3和表3可看出,在4种工况条件下,由厂家提供的原始数据得到的V-I曲线与实际测得数据误差相差较大,这是由于电池长期使用,参数已发生变化的结果,因此需根据实际情况对厂家提供的数据不断地进行修正。PSO算法的辨识结果比其他4种优化算法的辨识结果差,在低温度低照度下更为明显。IHHO算法的辨识结果优于PSO、ALO、GWO、HHO算法辨识结果约高出一个数量级,并且IHHO算法辨识得到的曲线与实测数据的曲线更为接近,这表明IHHO算法具有更精确的参数辨识能力。
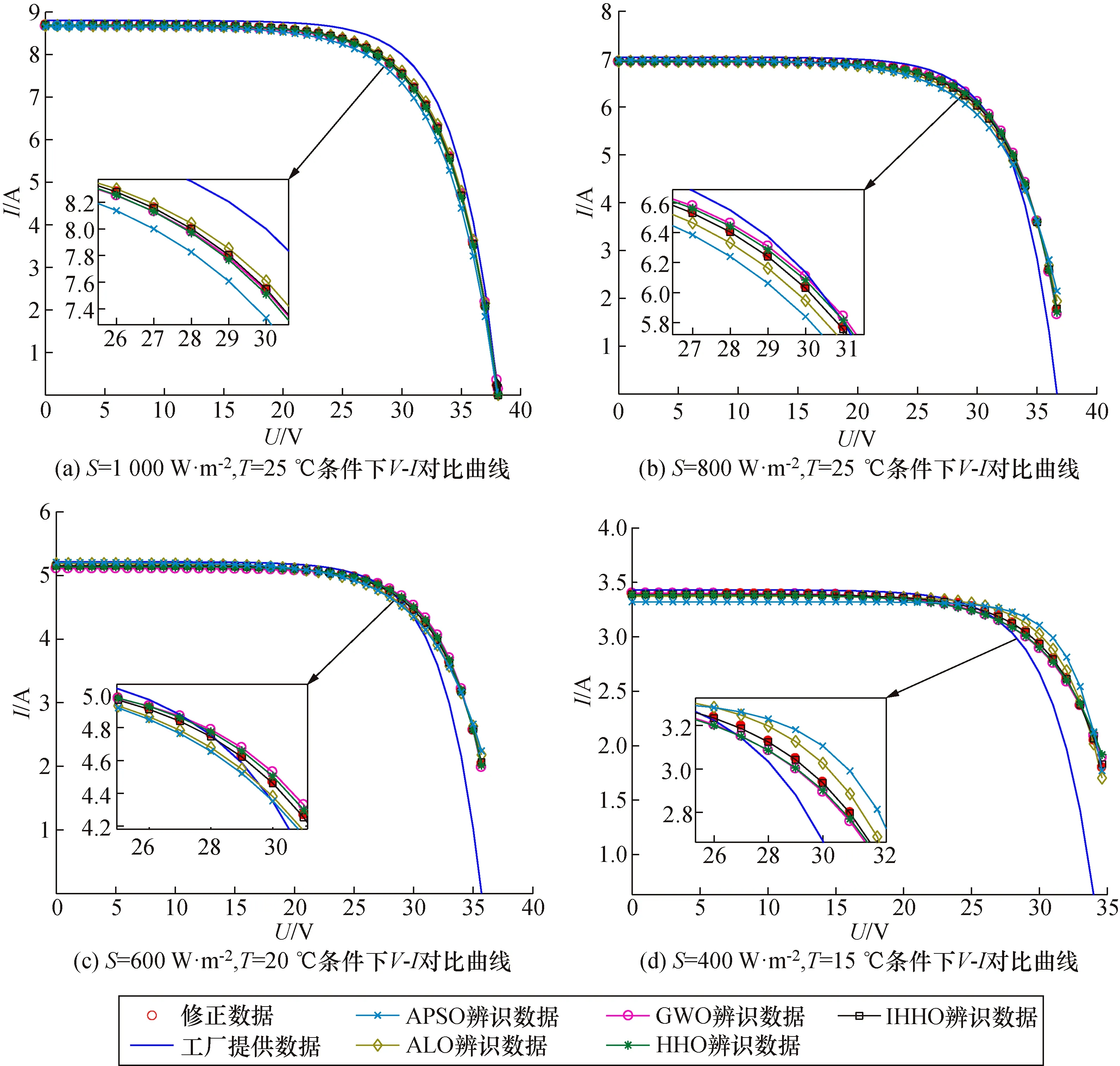
图3 4种工况条件下V-I曲线对比图Fig.3 Comparison of V-I curves under four operating conditions
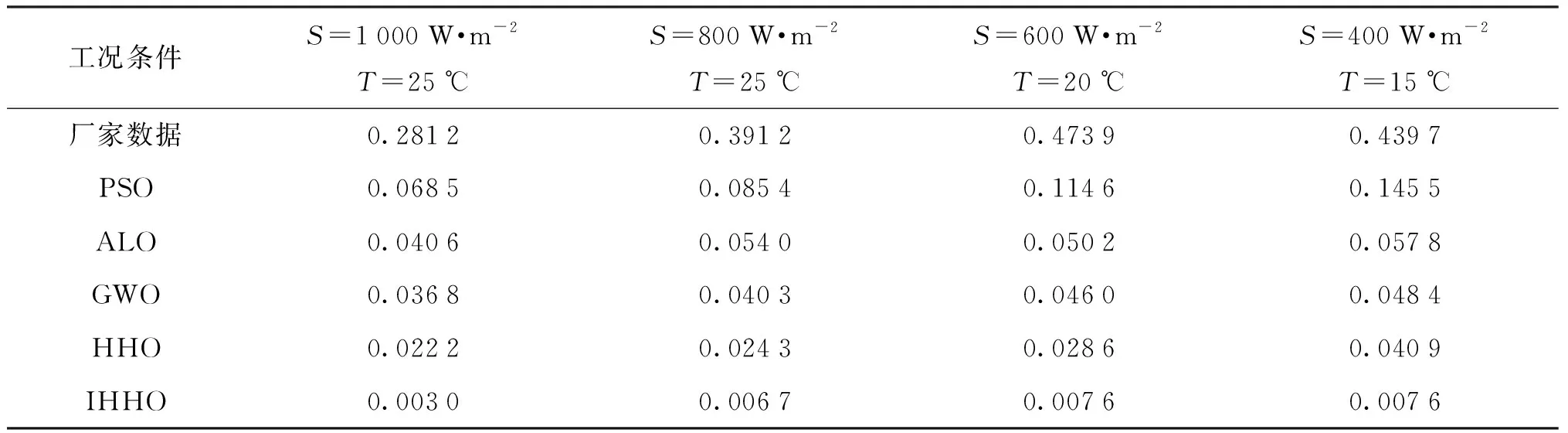
表3 F(x)值对比Tab.3 Comparison of fitness values F(x)
6 结 论
针对HHO算法有时会陷入局部最优,搜索过程调整不够灵活,不能针对性地进行阶段性搜索等影响搜索精度问题,对算法进行了改进。引入柔性递减策略,在迭代初期扩大全局搜索范围,在后期延长局部搜索时间,加强了初期的全局搜索能力和后期的局部搜索能力;引入黄金正弦法,增加了种群的多样性,使个体容易跳出局部最优,减少算法陷入局部最优的可能性,并缩小了搜索空间,提高了寻优效率。在应用于光伏电池工程模型的参数辨识中,IHHO算法的辨识结果优于PSO、ALO、GWO、HHO算法的辨识结果以及厂家的原始数据,更为接近实验测得数据,拟合匹配度较高,从而表明IHHO算法能够对光伏电池工程模型进行准确的参数辨识。
猜你喜欢
青少年科技博览(中学版)(2022年9期)2022-11-01
中学生数理化·七年级数学人教版(2022年11期)2022-02-22
数学物理学报(2021年2期)2021-06-09
第二课堂(小学版)(2019年7期)2019-07-16
金色少年(奇趣科普)(2017年1期)2017-03-03
微型小说选刊(2016年3期)2017-01-18
中国科技信息(2016年12期)2016-08-29
发明与创新(2016年38期)2016-08-22
艺术生活-福州大学厦门工艺美术学院学报(2016年3期)2016-07-31
西部广播电视(2015年10期)2016-01-18
