基于CenterNet 的光伏阵列遮盖物检测
2021-04-07 00:28陈诗坤卢箫扬
电视技术 2021年2期
陈诗坤,卢箫扬,冯 锴
(福州大学 物理与信息工程学院,福建 福州 350108)
0 引 言
近年来,太阳能作为一种可再生能源,凭借无污染、安全发电、无噪音运行和低安装成本等优点得到了快速发展[1-2]。然而,光伏性能的可靠性受实际运行中各种故障的影响[3]。在这些故障中,由光伏周围建筑物、树木、落叶、鸟类污染物以及灰尘等引起的阴影故障最常见[4]。阴影对光伏的影响并非恒定不变。研究发现,部分阴影达到20%时,光伏输出功率可下降到17.65%。事实上,部分阴影已导致每年10%~20%的电力生产损失[5-6]。此外,光伏组件上存在局部阴影会导致阴影单元过热。
视觉检测方法可以无接触、无损地监测光伏系统,且快速简便地提供位置信息,因此在光伏监测研究上优势明显[7]。此外,近年来快速发展的卷积神经网络,在图像分类和目标检测等视觉识别任务中表现优秀,因此已有大量研究将其应用于光伏故障检测[8-11]。
本文为提供更精准的光伏阵列监测状态信息,基于CenterNet 网络通过迁移学习训练了可见光遮盖物检测模型,实现了对不同光照方向、不同远近距离及不同遮挡程度等条件下对光伏阵列遮盖物的准确检测,为光伏阵列健康状态监测提供了可靠参考。
1 CenterNet 网络
1.1 网络简介
CenterNet 是Zhou 等 人 于2019 年 提 出 的[12],相 比 于One-stage(如YOLO)和Two-stage(如Faster R-CNN)等目标检测网络,提供了一种更简洁的思路。该网络通过主网络得到了一个热力图,根据热力图提取峰值中心点,再根据中心点回归目标的尺寸、位置等。该网络是无锚点目标检测网络,不需要提前设置锚点的超参数和区分正负样本,大大降低了模型的计算量和训练时间,在速度和精度上优势明显。主网络采用ResNet50提取图片特征[13]。为了满足原网络下采样因子为4 的要求,ResNet50的输出需经过3个反卷积模块对特征图进行上采样。整个网络的结构示意图如图1 所示。
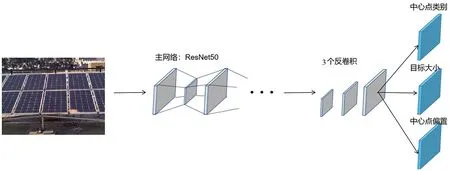
图1 CenterNet 网络结构示意图
1.2 损失函数
损失函数包括中心点损失Lk、目标大小损失Lsize和中心偏置损失Loff这3 个部分,因此整体损失L可表示为:

式中,λsize=0.1,λoff=1。
中心点损失Lk、目标大小损失Lsize和中心偏置损失Loff这3 项损失分别为:
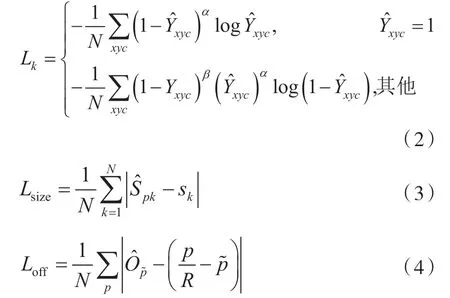
式中:α=2;β=4;N为图像关键点数量;为预测值;Yxyc为标注真实值;
为预测尺寸;sk为真实尺寸;R为下采样因子,取值为4;p为目标中心点坐标;预测偏移值;为目标缩放后中心点的近似整数坐标。
2 总体模型设计
基于CenterNet 训练和检测光伏阵列遮盖物检测模型的流程图,如图2 所示。
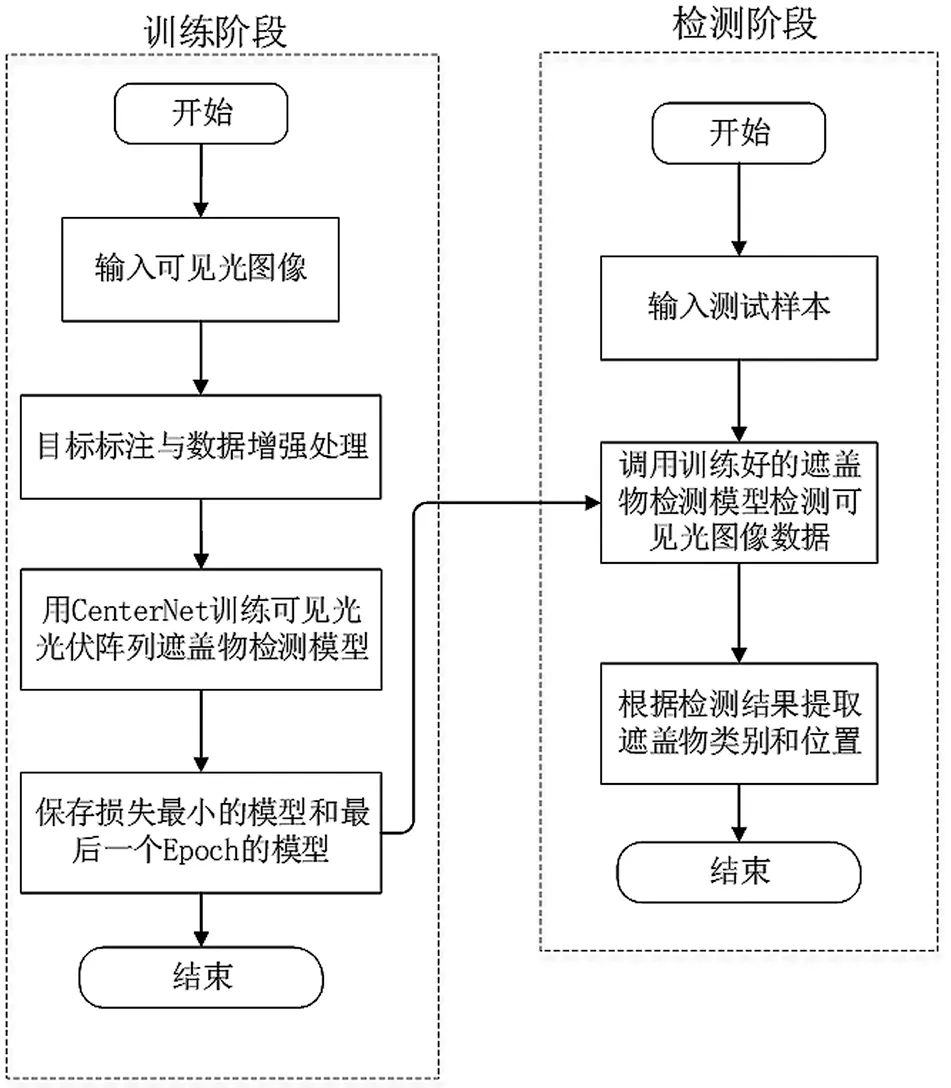
图2 模型流程图
2.1 图像获取和预处理
获取的光伏阵列可见光图像数据经过图像预处理再输入模型训练。图像预处理包括目标标注和数据增强。目标标注是标注目标的回归框和类别信息。回归框是矩形框由矩形左上角坐标、长度和高度构成。可见光图像数据标注的目标类别为遮盖物类别。研究中所检测的区域在图像任意位置都有可能,因此采用随机镜像翻转和光度扭曲实现数据增强,以增加训练数据,更好地实现模型训练。
2.2 模型训练与检测过程
遮盖物检测模型通过迁移学习,初始化主网络ResNet50 和上采样的预训练模型,加快模型训练。模型训练采用分步训练,先冻结预训练模型初始化的参数进行训练,收敛时再解除冻结整个网络训练,最终保存损失最小和最后一个Epoch 的模型。检测阶段输入测试样本到训练好的模型,通过模型检测遮盖物的类别、位置及框出遮盖物大小。
3 实验结果与分析
3.1 实验条件
实验所采用的光伏阵列如图3 所示,包括3 个组串和2 个参考板组件。每个组串由6 个光伏组件串联,3 个组串组成工作的光伏阵列。模型在基于Pytorch 的框架上搭建,其中torch 版本为1.3.1,语言环境Python3.6,硬件环境中CPU 为Intel i9-9900k,GPU 型号为GTX 2080Ti,显存11 GB。
3.2 样本集构建
实验数据中的故障由模拟产生,如图4 所示,通过硬纸片、树叶和细沙模拟硬性阴影。数据采集采取多角度、不同高度及距离进行多样化多尺度的拍摄,以更好地体现模型的鲁棒性。实验共采集数据389 张,部分样本如图5 所示。实验数据中包括449 个硬纸片类(标注为hard_paper)、394 个树叶类(标注为leaf)和339 个细沙类(标注为sandy_soil)。训练集、验证集和测试集之比为8:1:1。

图3 实验光伏系统

图4 故障模拟示意图

图5 部分样本数据示例图
3.3 结果分析与对比实验
为评价模型对遮盖物的检测效果,评价指标采用目标检测算法常用的指标AP、mAP以及检测速度。其中,AP表示某一类的平均检测精度,mAP为所有类别的均值,平均检测速度代表模型平均检测一张图片需要的时间。为了更好地评价CenterNet 的模型,搭建了YOLOV3 和Faster R-CNN 网络进行对比,实验对比结果如表1 所示。
从结果看,CenterNet 在遮盖物检测中mAP比YOLOV3 高 出22%,比Faster R-CNN 高5%。其中,硬纸片类AP最高为0.89,比YOLOV3 高8%,比Faster R-CNN 高9%。另外CenterNet 模型的平均检测速度为16 ms,比YOLOV3 算法快了2 倍多,比Faster R-CNN 算法则快了超19 倍。可见,CenterNet 网络模型精度更高,检测速度更快,实时性效果更好。部分检测效果如图6 所示。

表1 实验对比结果

图6 检测结果示意图
4 结 语
本文提出的基于CenterNet 的光伏阵列遮盖物检测方法,通过可见光图像很好地检测了遮盖物,为光伏运维提供了有效保障。实验结果表明,在不同光照方向、不同远近程度和不同遮盖程度的光伏阵列实验数据中,该方法比YOLOV3 和Faster R-CNN 两个对比算法的平均检测精度高且检测速度快。该方法不仅能更有效检测多种类遮盖物,而且实时性较强,在实际应用中可以配合无人机对光伏阵列遮盖物进行实时巡检。
猜你喜欢
数学小灵通·3-4年级(2021年5期)2021-07-16
文苑(2020年11期)2020-11-19
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
中国诗歌(2019年6期)2019-11-15
电脑报(2019年4期)2019-09-10
今日农业(2019年15期)2019-01-03
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学大王·中高年级(2016年4期)2016-05-14
广西民族大学学报(自然科学版)(2015年3期)2015-12-07