距离选通水下激光成像作用距离简化核算方法
2021-04-07 12:22付学志王庆胜邓代竹
激光与红外 2021年3期
付学志,王庆胜,邓代竹,李 季
(1.92228部队,北京 102488;2.湖北久之洋红外系统股份有限公司,湖北 武汉 430223)
1 引 言
目前水下成像探测技术主要有声呐探测和光电探测两种途径[1-3]。声呐探测技术探测距离较远,但成像空间分辨力较差,难以适应高分辨力成像的需要;光电成像探测技术虽然存在光线在水中传输衰减较快等限制因素,但成像空间分辨力高,且输出图像更符合人的视觉与心理特征。在水下光电成像系统中,采用激光主动照明距离选通成像技术可有效抑制水体后向散射对成像系统探测距离和图像分辨率的影响,显著提高对水下目标成像对比度及成像距离,但其成像距离又与水质衰减系数强相关[4-6]。考虑水下实际使用环境的时空复杂性以及试验组织实施难度,海上试验无法遍历各种水质条件,本文给出了一种使用某次试验数据核算得到特定水质条件下有效作用距离的简化计算方法,可作为开展技术论证和试验鉴定工作的参考。
2 试验设备组成
该距离选通水下激光成像设备主要由超声波测距模块、激光照明模块(激光器和发射光学系统)、距离选通成像模块(ICCD和接收光学系统)、图像显示模块、电气和控制模块、电池组及结构等部分组成。其中激光照明模块由高重频绿光激光器与发散角可变发射光学系统组成,距离选通模块由选通像增强及控制电路与CCD、视场可变接收光学系统组成,电气和控制模块主要包括电源管理电路、主控电路、图像处理电路、视频存储电路及液晶显示电路等。其组成框图如图1所示。

图1 水下激光成像试验设备组成示意图
3 工作原理
在激光主动照明距离选通成像模式下,主控模块根据超声波模块返回的距离信息自动调整接收镜头的视场与激光发射镜头发散角,同时根据返回距离信息计算ICCD距离选通信号相对照明激光脉冲的延时,完成对ICCD阴极选通信号的时序控制,完成对特定距离的目标实现选通成像。显示屏显示视频图像及目标距离,存储模块开始录像。
主动模式激光照明距离选通成像可以分为三个阶段,原理框图如图2所示。


图2 距离选通成像原理框图
(1)激光器向目标方向发射高重频短脉冲激光,当激光脉冲处于往返途中时,会受到传输介质中粒子吸收、散射等影响,尤其是强烈的后向散射光往往会将有用的信号淹没,使ICCD饱和而无法接收有用的光信号,这时ICCD成像模块的选通门关闭,隔离水中粒子引起的后向散射光。
(2)当目标反射光到达ICCD成像模块时,ICCD成像模块选通门开启,让来自目标的反射光进入成像模块。选通门开启持续时间不小于激光脉冲持续时间。
(3)接收到从目标反射回来的激光脉冲信号后,再将选通门关闭,使背景辐射等其他的干扰光不能进入ICCD。这样形成的目标图像主要与距离选通时间内的反射光有关。如果选通脉冲宽度和激光脉冲宽度都很窄,使得ICCD只能探测到目标附近的反射光,就可以显著提高回波信号的信噪比。
4 作用距离分析
设照明激光单脉冲能量为δ,激光脉宽为τ,则瞬时功率P=δ/τ。设水质衰减系数为α,激光束经扩束后水中照明视场为ΘI,则在距离S处的轴上目标的瞬时照度(功率密度)E″为[7-9]:
(1)
式中,tan为正切三角函数。
设目标的朗伯反射率为ρ,则目标的亮度L″为:
(2)
由于目标反射光线需经过长度为S的海水衰减才能到达摄像机,故ICCD处观察目标的等效亮度L为:
L=L″e-α·S
(3)
ICCD光学成像系统的物方介质和像方介质为两种不同物质,设像方亮度为L′,根据折射界面亮度传递规律有:
(4)
式中,k表示光学系统透过率;n表示海水折射率,根据有关公式可知像面光照度E′为:
(5)
式中,U′为成像镜头的像方孔径角。
将式(1)~(4)代入式(5):
(6)
E′为ICCD摄像机靶面的瞬时照度值,基于距离选通系统的工作原理,E′对靶面的感光时间在激光器出光的一个脉冲周期内仅为τ,靶面的感光是断断续续进行的,而ICCD的灵敏度值是以平均照度度量的,因此必须将E′等效成一个平均照度E,为此设激光器的脉冲重复频率PRF为m,则:
E=E′mτ
(7)
再结合P=δ/τ,将E′代入上式得:
(8)
当S=r/α,即在r倍海水衰减长度距离处的目标在ICCD靶面上产生的平均照度E为:
(9)
将k、m、δ、ρ、n、ΘI、U′、α看成系统固定参数,将ICCD的灵敏度阈值代入E,求解出的r值即为系统的相对作用距离(以衰减长度来度量)的极限值,绝对距离S的极限值为S=r/α。将式(9)变换为:
(10)
如上式,设E一定,系统参数不变,则当α增大时,为了维持E不变,则S必须减小。反之,当α减小时,则S增加,这说明在水质变好时,尽管系统的相对作用距离r有所减小,但绝对作用距离仍然增加。
像方孔径角U′与光学镜头的焦距、出瞳以及物距S等参数有关,在设计光学镜头时,要使设计结果保证E在S从零变到极限距离的整个过程中始终大于ICCD的阈值灵敏度。U′的值随物距S的变化稍有变化。
重写式(8)、式(9)和式(10):
(8)
(9)
(10)
当设备的最小探测照度一定时,作用距离与衰减系数具有一定关系。将上述公式变换为:
(11)
将式(11)做归一化处理:
S2=C2e-2αS=C2e-2r
(12)
式中,C为归一化系数,
所以:
S=Ce-αS=Ce-r
(13)
5 试验数据核算
上述作用距离分析是根据目标返回光的照度和ICCD的灵敏度来估计,不考虑后向散射的影响,返回光的像面照度刚好等于ICCD的灵敏度时为探测极限距离,即ICCD刚好能探测到目标返回光时的距离为系统的作用距离。不考虑后向散射是因为通过距离选通以后,绝大部分散射光被抑制,影响较小,因而所成图像的信噪比很高,作如此简化基本上是合理的[10]。
某次水池试验中,测得水质衰减系数为 0.39/m,使用图1中的试验设备开展水下目标探测试验。试验目标靶为白底黑条纹试验板,试验靶尺寸为1.2 m×0.6 m,目标靶黑条纹4圈,条纹间距分别为12 mm、24 mm、36 mm和48 mm,如图3所示[11]。

图3 试验目标靶
采用拉距试验方法,结合水下人员肉眼观察判定对目标的探测和识别作用距离,拍摄并存储的目标成像图像如图4所示。
根据式(13)可见:
(1)当衰减系数α0=0.39时,作用距离S0t=18 m(探测),则C0t=20138;
(2)当衰减系数α0=0.39时,作用距离S0s=12 m(识别),则C0s=1293;
(3)当α=0.39时,作用距离S与归一化系数C的关系曲线如图5所示。
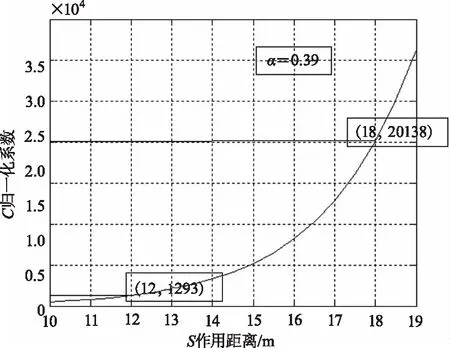
图5 作用距离S与归一化系数C的关系曲线(水质衰减系数α=0.39)
海上试验中,测得某试验海域水质衰减系数α=0.2,采用归一化计算方法,作用距离S与归一化系数C的关系曲线如图6所示。
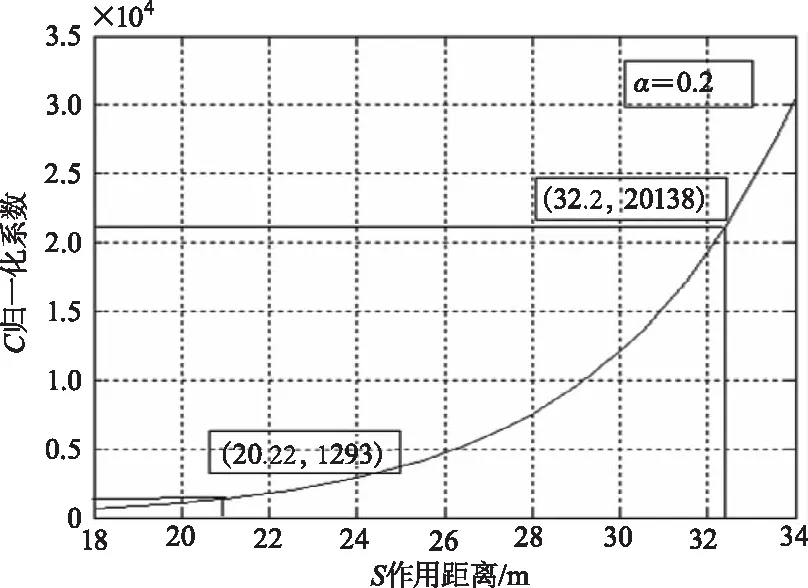
图6 作用距离S与归一化系数C的关系曲线(水质衰减系数α=0.2)
分析可见:
(1)当作用距离S=32.2 m时,归一化系数C=20138,即当衰减系数α=0.2,该设备探测距离可达32.2 m;
(2)当作用距离S=20.68 m时,归一化系数C=1293,即当衰减系数α=0.2,该设备识别距离可达20.68 m。
6 结 论
该简化核算方法结合距离选通水下激光成像技术原理,将通过距离选通以后的散射光影响忽略,以ICCD刚好能探测到目标返回光时的距离为系统的作用距离,采用归一化计算方法推算得到特定水质条件下的作用距离,是一种简化计算模型,适用于计算采用了距离选通技术的水下激光成像系统作用距离。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
光源与照明(2019年4期)2019-05-20
无损检测(2018年11期)2018-11-28
现代测绘(2018年5期)2018-02-18
中成药(2017年12期)2018-01-19
长江大学学报(自科版)(2017年19期)2017-10-14
照明工程学报(2017年3期)2017-07-10
中国测试(2016年3期)2016-10-17
湖北大学学报(自然科学版)(2011年4期)2011-03-20