最优控制理论在智能汽车横向控制中的应用*
2021-04-07 13:34:06隋官昇王昊斌周草草吕俊成
汽车实用技术 2021年6期
隋官昇,王昊斌,周草草,吕俊成
最优控制理论在智能汽车横向控制中的应用*
隋官昇1,王昊斌1,周草草2,吕俊成3
(1.吉林大学 汽车工程学院,吉林 长春 130022;2.中动智轮科技有限公司,广西 柳州 545006; 3.上汽通用五菱汽车股份有限公司,广西 柳州 545007)
针对汽车转向几何学和运动学模型适合低速轨迹跟踪、精度低等特点,利用简化后的线性二自由度车辆模型和预瞄误差模型,建立了预瞄式轨迹跟踪模型。结合最优控制理论,设计LQR控制器计算期望的车轮转角并增加前馈控制器消除稳态误差,实现车辆跟随期望路径。通过CarSim与Simulink的联合仿真,验证了横向控制策略具有较好的控制效果。
智能车辆;横向控制;线性二次型调节器
引言
以提高道路交通安全、减少能源损耗与环保为主要目的,智能车辆成为汽车行业转型发展新的风向标,世界各国政府投入了大量的经费,相关科研人员也开展了广泛的研究。而运动控制是智能汽车领域的研究重点和难点,是实现无人驾驶汽车落地行驶的一项关键技术,直接确保了车辆在道路上行驶的安全和稳定。
横向控制是依据车辆和道路等信息,设计某种控制策略对智能汽车的车轮转角进行控制,进而实现车辆对期望路径快速精确地跟随。车辆横向控制研究开始于20世纪50年代,随着研究的深入,对于车辆动力学模型的了解和掌握也趋于成熟,其中应用广泛且相对简单的便是单轨模型。
国内外学者针对横向控制问题提出了许多研究方法,比如PID控制,最优控制,滑模控制,模型预测控制等。文献一[1]通过设计自适应PID控制器实现了控制器参数的实时调整,提高了轨迹跟踪的精度,而且系统的稳定性也得到了优化;文献二[2]研究了一种上层模糊控制,下层PID反馈控制的分层式控制器,并验证了该控制器的有效性;文献三[3]在车辆动力学模型的基础上,研究了反馈线性化的轨迹跟踪横向控制器;文献四[4]利用滑模控制理论,以车辆线速度和角速度为输入,实现了车辆对目标轨迹的跟踪;文献五[5]设计了三维模糊控制算法,并验证了该算法具有良好的适应性。
汽车的转向几何学和运动学模型仅适用于低速工况下的轨迹跟踪研究,忽略了车辆本身的动力学特征,一旦车速过快或者曲率发生突变的情况发生,控制算法便无法满足车辆轨迹跟踪精度和稳定性要求,甚至导致危险的发生。本文主要介绍车辆的轨迹跟踪模型,包括车辆动力学模型和预瞄式跟踪模型,基于最优控制理论建立轨迹跟踪控制器并验证了控制效果。
1 轨迹跟踪模型
1.1 车辆线性二自由度动力学模型
对于基于车辆动力学模型的控制方法,动力学建模是首要的工作。由于车辆动力学模型具有非线性和时变性的特征,因此整个车辆的精确建模难度很大。在横向控制中,车辆侧向运动特性是关注重点,通常将车辆动力学模型简化为的二自由度横向动力学模型。假设车身的纵向速度保持不变,其横向动力学模型的只有侧向运动和横摆运动两个自由度。
为了保证路径跟踪控制的实时性,需要在二自由度动力学精确模型的基础上进行一些简化计算,得到二自由度动力学简化模型,如图1所示。
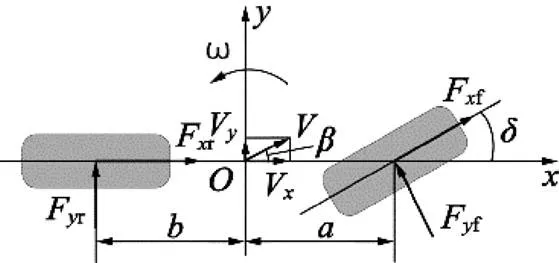
图1 汽车二自由度动力学模型
由简化后的车辆动力学模型可以得到,车辆横向运动和横摆运动的微分方程为:

式中:
m——汽车质量(kg);
v——汽车横向车速(m/s);
F、F——汽车前、后轮纵向力(N);
F、F——汽车前、后轮侧向力(N);
——汽车横摆角速度(deg/s);
I——汽车相对 z 轴的转动惯量(kg.m2)。
在轮胎模型是线性的情况下,前、后轮侧向力简化得:
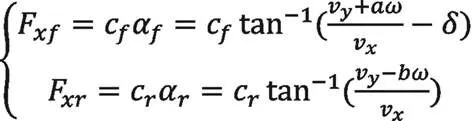
式中:
、——前、后轮的轮胎侧偏角(deg);
c、c——前、后轮的轮胎的侧偏刚度(N/rad);
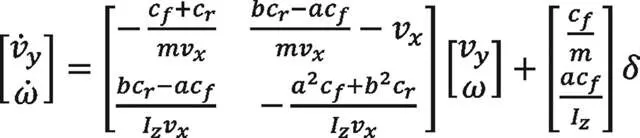
将式(2)代入式(1)得:
1.2 预瞄误差模型
车辆的轨迹跟踪可以分为两种:预瞄式轨迹跟踪和非预瞄式轨迹跟踪。预瞄式轨迹跟踪考虑了道路的几何特性,鲁棒性好,因此本文采用预瞄跟踪模型,如图2所示。
其中,L为预瞄距离;a和b为汽车质心到前、后轴的距离;为车身纵向轴线与道路中心线之间的夹角;和分别表示车辆前后轴中心至道路中心线的横向偏差;和分别为预瞄点和车辆质心到道路中心线的横向偏差。
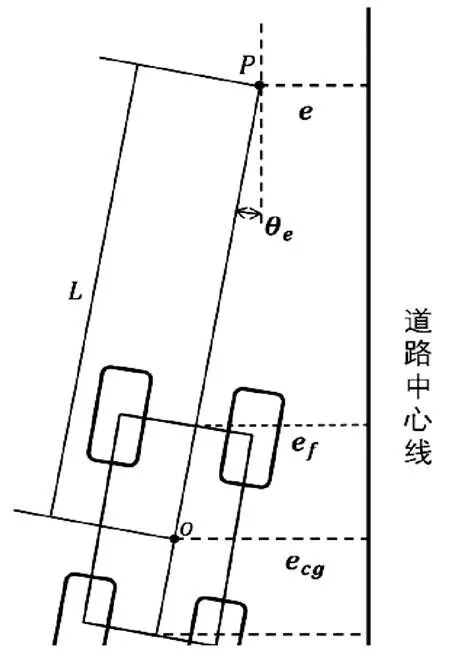
图2 预瞄误差模型
从图2的几何关系可以得到:

因为θ足够小,所以式(4)可以近似为:

预瞄误差变化率为:
1.3 轨迹跟踪偏差状态方程
利用汽车质心处与道路中心线之间的距离建立路径跟踪误差模型,车辆跟踪目标轨迹时的期望向心加速度和期望横摆角速度可以表述为:

当θ足够小时,质心处的横向跟踪误差和角度跟踪误差θ满足:
假设汽车纵向速度恒定,将式(8)微分后得到:
将式(8)代入式(6),则预瞄点处的横向循迹误差满足:

将式(10)两边求导得:

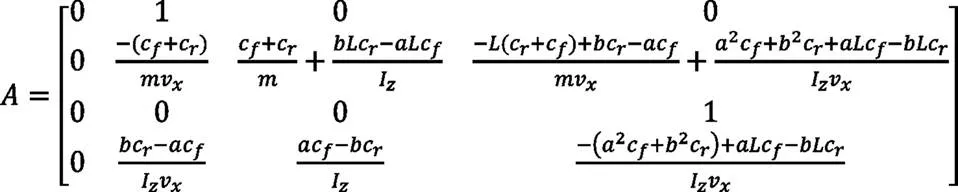
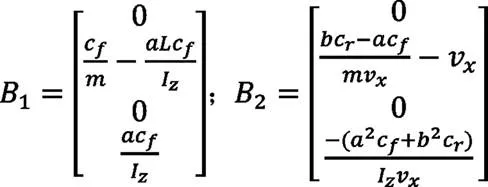
将式(9)、(10)、(11)代入式(3)得到的状态空间方程为:

3 智能汽车横向跟踪控制器设计
3.1 横向跟踪LQR控制器
在现代控制理论中,用状态空间方程表示的线性系统是线性二次型调节器(Linear Quadratic Regulator,LQR)的主要研究对象,将控制输入的二次型函数或控制对象的状态设计为目标函数。
考虑一个系统:

式中,()为状态变量,()为控制量。
假设初始状态(0)=0,二次型评价函数的一般形式如下:

式中,0()为半正定终端加权矩阵,()为半正定加权矩阵,()为正定加权矩阵。()、()通常取对角阵。
通过使目标评价函数获得最小值,求得系统的最优控制量(),将系统从初始状态转移到最终状态,达到以最小的消耗量保持较小误差的控制效果,实现能量和误差综合最优的目的。
设计系统的反馈控制律:

其中,为黎卡提方程+AP--1BP+=0的解。
3.2 前馈控制器
将式(15)的反馈控制律代入状态空间方程(12)中,得到系统的稳态反馈方程:

令前馈控制输出的车轮转角为δ,则加入前馈模块的横向跟踪LQR控制器的完整控制律表示为:

将式(17)代入式(12)得到:

对式(18)进行拉普拉斯变换,利用终值定理求极值可以得到距离偏差和航向偏差的稳态误差:

其中,e为横向跟踪距离偏差的稳态值;为横向跟踪航向偏差的稳态值。
由式(19)可以得知,通过前馈控制进行补偿可以消除距离偏差的稳态值e;但是,δ无法改变横向跟踪角度误差的大小,因此航向偏差的稳态值无法收敛至零。
当δ满足式(20)时,可以使稳态误差e收敛至0:

4 智能汽车横向跟踪控制器仿真验证
4.1 参考轨迹设置
本文使用双移线道路进行横向跟踪控制器的效果验证。双移线轨迹的函数如下:

4.2 仿真实验
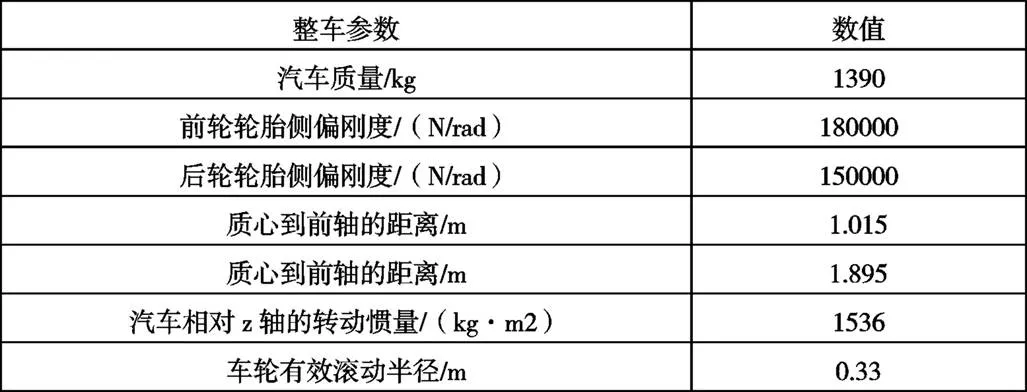
利用MATLAB工具箱中的LQR()函数计算出反馈控制律,从而得到期望的车轮转角。为消除稳态误差的影响,根据式(20),在横向跟踪LQR控制器的基础上加入前馈控制器。整车参数如表1所示。
表1 汽车整车参数
以10m/s、15m/s、20m/s的车速在良好路面上进行横向轨迹跟踪,仿真结果如图4、图5所示。以15m/s的恒定车速分别在道路摩擦系数为0.4和0.85的路面上进行轨迹跟踪实验,结果如图6、图7所示。
<
图4 不同车速的轨迹跟踪效果
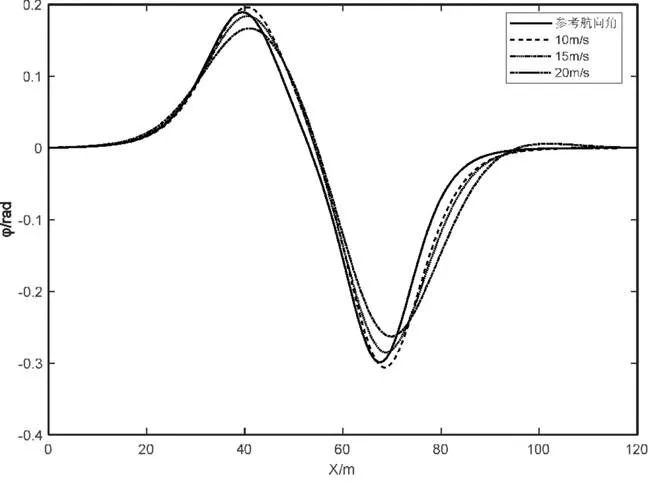
图5 不同车速的航向角变化
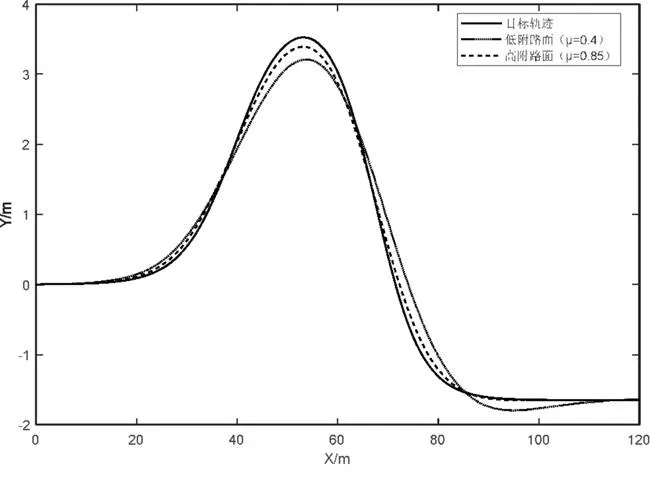
图6 不同道路摩擦系数的轨迹跟踪效果
由图4可以看出,以10m/s的车速沿着目标轨迹行驶时,汽车可以较好的跟踪目标路径,横向跟踪误差保持在较小的范围之内;当车速为15m/s时,横向跟踪误差逐渐增大,但是仍在比较合理的范围内;当车速达到20m/s时,横向控制器的轨迹跟踪精度有了明显的下降。图5描述了航向角的变化,在中低速工况下航向角能较好地跟踪期望的航向角,车辆行驶稳定性较好,高速工况下稳定性变差。
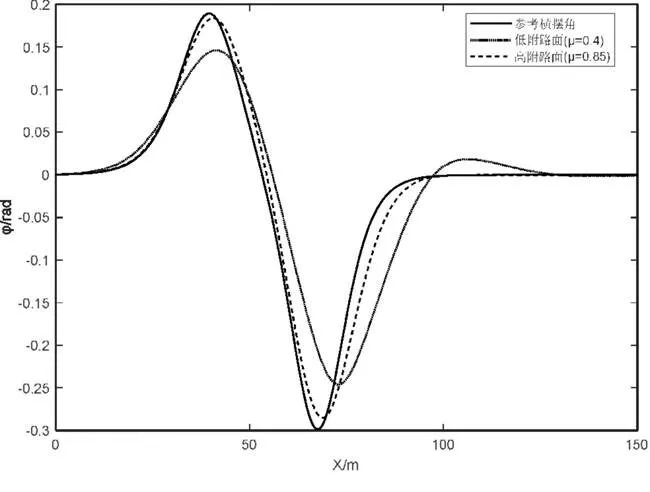
图7 不同道路摩擦系数的航向角变化
由图6、图7可以看出,当车辆在摩擦系数为0.4的低附着系数路面上行驶时的轨迹跟踪效果要差于在摩擦系数为0.85的高附着系数路面行驶,航向角也出现了较大的偏移,行驶的稳定性下降。因为在低附着系数路面行驶到转弯时,轮胎更容易达到饱和,前轴发生侧偏,造成车辆偏离参考轨迹,对此可以通过添加动力学约束或改进轮胎的方法减小偏差。
5 结束语
本文介绍了车辆二自由度动力学模型和预瞄误差模型,在二者基础上建立了预瞄式轨迹跟踪模型。结合最优控制理论,设计了横向跟踪控制策略,为了消除横向控制器在轨迹跟踪过程中产生的稳态误差,在原有LQR控制器的基础上加入前馈模块。最后,验证了在不同车速工况和不同道路附着系数工况下,该横向控制策略具有良好的轨迹跟踪效果。
[1] Ziegler J,Bender P,Schreiber M,et al.Making Bertha Drive An Autonomous Journey on a Historic Route[J].Intelligent Transporta -tion Systems Magazine, IEEE,2014,6(2):8-20.
[2] Perezn J,Milanes V,Onieva E.Cascade Architecture for Lateral Con -trol in Autonomous Vehicles[J]. Intelligent Transportation Systems, IEEE Transactions on,2011,12(1):p.73-82.
[3] 陈杨,刘大学,贺汉根,等.基于车辆动力学的轨迹跟踪器设计[J].中国工程科学,2007,009(011):68-73.
[4] 李渊,马戎,付维平.智能车辆的滑模轨迹跟踪控制[J].测控技术, 2012,31(09):71-74.
[5] 周俊,姬长英.智能车辆横向控制研究[J].机器人,2003(01):26-30.
Application of Optimal Control in Lateral Control of Intelligent Vehicle*
Sui Guansheng, Wang Haobin, Zhou Caocao, Lv Juncheng
(1.School of Automotive Engineering, Jilin University, Jilin Changchun 130022; 2.China Power Intelligent Wheel Technology Co., Ltd, Guangxi Liuzhou 545006; 3.SAIC GM Wuling Automobile Co., Ltd., Guangxi Liuzhou 545007)
Aiming at the characteristics of vehicle steering geometry and kinematics model suitable for low-speed trajectory tracking and low precision, a preview track tracking model is established by using the simplified linear two degree of freedom vehicle model and preview error model. Combined with the optimal control theory, LQR controller is designed to calculate the expected wheel angle, and a feed forward controller is added to eliminate the steady-state error and realize the vehicle to follow the desired path. Through the joint simulation of CarSim and Simulink, it is verified that the lateral control strategy has good control effect.
Intelligent vehicle; Lateral control; Linear quadratic regulator
10.16638/j.cnki.1671-7988.2021.06.015
U495
A
1671-7988(2021)06-48-04
U495
A
1671-7988(2021)06-48-04
隋官昇(1998-),男,硕士研究生,就读于吉林大学汽车工程学院,研究方向为车辆动力学。
柳州市科技计划项目(2018AA20501)。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
煤气与热力(2021年4期)2021-06-09 06:16:54
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
中华戏曲(2020年1期)2020-02-12 02:28:18
汽车维护与修理(2018年1期)2018-04-04 01:13:22
系统医学(2016年8期)2016-02-20 02:55:08
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33