电动汽车通信网络的MEC部署策略研究
2021-04-06 02:47石珩臻
通信电源技术 2021年1期
石珩臻
(华信咨询设计研究院,浙江 杭州 310052)
0 引 言
自2006年云计算出现以来,人们的生活都享受到了其带来的改变,如Google Apps,Weibo,Wechat,Tiktok等软件即服务实例。新终端也更倾向于引入云计算技术。据爱立信预测,到2023年,将有320亿台终端设备连接到移动网络。大量的终端设备给用户带来了便捷的服务,但是随之带来了可靠连接及低延迟连接等QoS方面的挑战。为此,人们提出了移动边缘计算(Mobile Edge Computing,MEC)的概念,以解决云计算存在较长的传播时延的问题[1]。因此,边缘计算也被广泛认为是实现下一代互联网的关键技术。
边缘计算的前身是CDN,它于1998年由Akamai公司提出;此时,只是强调对内容进行缓存,并不涉及到功能缓存。直到2005年,施巍松教授团队才在个性化的邮箱管理服务中使用了功能缓存的思想[2]。随后,出现了强调云服务功能下行的Cloudlet;从此,国内外出现了ETSI和ECC等联盟,制定和完善了边缘计算的行业标准[3,4]。2019年9月,IMT-2020(5G)推进组支持创建的首批MEC与C-V2X融合测试床正式启动。
当前边缘计算处于小范围试商用阶段,与边缘计算有关的应用场景众多;总体上可分为传统业务应用场景及新业务应用场景。
1 业务分析
传统业务应用场景有CDN/视频流,新业务应用场景包括V2X、智能制造、物联网等。不同的业务有差异化的需求。典型业务的部署需求如表1所示。
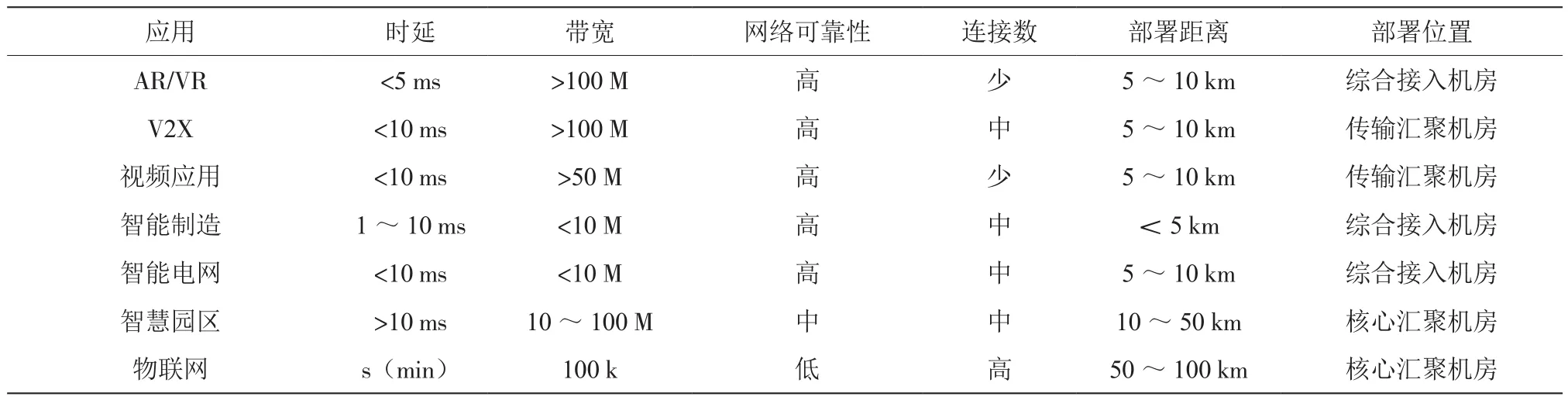
表1 典型业务部署需求
其中,V2X业务对时延和带宽的要求都比较高,时延要求小于10 ms,带宽大于100 M。当MEC服务器部署于接入网后的传输汇聚机房,可满足V2X业务对时延和带宽的需求。
2 关键技术
对于边缘计算的典型业务V2X来说,需要综合考虑服务发现,快速配置等问题[5]。
2.1 服务发现
命名数据网络(Named Data Networking,NDN)架构与传统TCP/IP架构类似,也是采用7层架构[6]。不过,该架构将中部的IP层替换成了内容块,并在该层上下加上了安全层和策略层。该网络架构解除了IP地址与终端设备之间的绑定关系,使消费者能更高效地获取该节点所需的内容。因此,在VANETs中使用NDN技术有助于克服因网络拓扑动态性造成的间歇性的连接问题。
NDN网络的处理流程与传统TCP/IP有所不同。在NDN网络中,有兴趣包和数据包两种形式的包:
(1)当一个节点(生产者或转发者)收到一个兴趣包时,它会检查其CS(数据内容缓存)内容。如果兴趣包的内容名与CS中的内容名一致,则直接依据兴趣包按照请求的路径返回给请求端(消费者)。
(2)如果不一致,则检查其PIT(待处理信息表)中的条目。此时,如果有匹配的条目,则在对应条目中添加与兴趣包消费者对应的接口;如果不匹配,再检查其FIB(转发信息表)。若有匹配项,则按照FIB中的接口进行转发;若仍不匹配,则丢弃或者回复NACK信息。
(3)当一个节点(消费者或转发者)收到一个数据包时,首先检查其CS中的内容。如果已有对应的内容,则丢弃;如果没有对应的内容,则检查其PIT中的条目。若与数据名称匹配,则进行转发,并进行缓存;反之则丢弃该数据包。
2.2 快速配置
车载自组织网络属于移动自组织网络的分支;传统网络中控制逻辑和数据转发紧耦合的方式使得网络控制平面变得十分复杂。若将SDN技术用于车载自组织网络中,可以动态地实现网络资源的弹性分配和控制。在数据传输效率、高可靠性方面有明显的优势。
SDN整体架构分为数据平面、控制平面和应用平面[7]。控制平面与应用平面之间通过SDN北向接口NBI进行通信;控制平面与数据平面之间基于OpenFlow协议,通过南向接口CDPI进行交互;并实现了数据转发与规则控制相分离。图1为基于SDN的电动汽车通信网络控制编排平面,部署在MEC服务器上。
3 建设方案
本文参考ETSI的MEC标准,基于OpenStack开源框架给出了一种在不影响现有业务的基础上,将边缘计算技术引入现有网络的方案,其网络拓扑图如图2所示。下面将从边云基础设施,业务承载网络与业务部署三个层次对该方案进行介绍。
3.1 边云基础设施
在该拓扑图中,存在着MEC服务器与云服务器。云服务器一般部署在云端(5GC机房),而MEC服务器可根据业务场景不同,以标准服务器、多节点一体机、一体机、小盒子等形式部署在地市核心机房、传输汇聚机房、综合接入机房、站点机房等不同位置。一般来说,MEC服务器越靠近终端用户,缓存加速服务(Traffic Caching and Accelerating Service,TCAS)对QoE的提升效果越明显,相应的网络传输资源要求和MEC设备的性能指标要求会有所降低[8-9]。然而,MEC部署越靠近网络边缘,所需的MEC数量也会随之增加,从而导致总成本以及管理复杂度的提升。
在电动汽车通信网络中,MEC服务器与云服务器分别承担着不同的功能。其中,近端的MEC服务器搭载训练好的自动驾驶算法,实时进行精准的自动驾驶。并由MEC服务器将处理后的部分数据汇集到云服务器,以进行进一步的分析判断,完成自主学习闭环。同时,边缘的数据也在云端有备份;当边缘计算过程中出现意外情况,存储在云端的数据也不会丢失。
3.2 业务承载网络
5G承载网承载着多种业务。N4/N5口业务承载在IP承载网上,N6/N9口业务媒体面承载在CMNET上。对于N4/N5业务,位于地市MEC UPF的N4,AF的N5;通过IP专网CE,承载在IP专网“信令VPN”上;位于区县MEC UPF的N4,AF的N5,通过传输专线就近接入到地市的IP专网CE实现承载。对于N6/N9口业务,在地市机房,MEC通过防火墙接入CR,承载在CMNET上;在区县机房,部署在BRAS/SR机房,新增防火墙,通过BRAS承载在CMNET上;区县以下的MEC业务通过传输专线(PON/SPN/PTN)接入就近区县的BRAS,进而承载在CMNET上。
然而,并不是所有的数据都需要经过承载网上传到云端,这就需要在MEC进行分流。这样做能避免传统网络中的流量迂回,降低业务时延。常见的分流方案有3种,分别是基于L3/L4规则及域名实现本地分流、基于APN/DNN的本地分流、基于UL CL(UPF下沉)实现本地分流[10]。
3.3 业务部署
就具体应用而言,边缘计算可应用于电动汽车通信网络。其中,采用了NDN技术,容器技术。电动汽车通信网络应用中涉及到大量的摄像头、传感器,这些采集设备每时每刻都在产生大量的数据;以一个包含8个720P摄像头,4个其他传感器的自动驾驶汽车为例,其每天产生的数据量就高达4 TB。在这些场景中,要想实现某些特定的功能,服务发现是一个不得不面对的问题。服务发现的主流方法有3种,分别是传统集中式代理,客户端嵌入式代理,主机独立进程方案[11]。这几种服务发现方案的优缺点对比如表2。

表2 服务发现三类方式比较
经比较,电动汽车通信网络应用中的服务发现优先选择主机独立进程方案。
对于电动汽车通信网络应用,存在着异构网络;为了解决异构网络中的数据交互,需要用到容器技术。以电动汽车通信网络应用为例,根据有无车辆协同以及路侧协同,其业务分为4类。最简单的是单车与MEC进行交互,如本地信息分发,动态高精度地图。其次,是有车辆协同,无路侧协同,如V2V信息转发,车辆感知共享。还有,就是有路侧协同,无车辆协同的情况,如危险驾驶提醒,车辆违章预警。此外,有时既有路侧协同,又有车辆协同,如智慧交叉路口,大范围协同调度[12]。
根据不同业务部署的需求,业务支撑系统向MEC下发部署指令,可在边缘服务器上根据部署指令下载镜像并创建容器,拉起多项服务。当自动驾驶车辆需要某项服务时,可由自动驾驶车辆的OBU进行处理;当OBU无法处理时,才由部署于MEC的service进行处理,且在处理完成后经过网络返回处理结果。由于MEC相较于云服务器更靠近终端,因此该操作可能在电动汽车通信网络场景下实现更低的时延,带来更加安全可靠的服务。
4 总结和展望
本文从应用的角度对边缘计算的典型业务进行了分析,并将边缘计算引入现有网络。由于现阶段的自动驾驶仍属于L4及L4以下的自动驾驶;接下来的工作,可考虑在网络边缘部署电动汽车通信网络业务;对电动汽车通信网络中的边缘缓存,计算迁移等问题进行进一步的研究。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
现代仪器与医疗(2022年4期)2022-10-08
科技传播(2019年22期)2020-01-14
电子制作(2019年16期)2019-09-27
中学生数理化·高三版(2019年1期)2019-07-03
中学生数理化·高三版(2019年1期)2019-07-03
通信产业报(2016年44期)2017-03-13
试题与研究·高考数学(2016年1期)2016-10-13
小朋友·快乐手工(2009年4期)2009-04-28
雕塑(1999年2期)1999-06-28