电磁态势感知系统的可视化设计∗
2021-04-06 06:51:44赵海博杨建喜刘若雯
北京电子科技学院学报 2021年1期
赵海博 杨建喜 刘若雯
北京电子科技学院,北京市 100070
1 前言
电磁环境由多种电磁信号组成,这些电磁信号在空间,时间,频率和能量中密集分布,并且数量众多,复杂且动态交替。 在复杂的战场中,电磁环境通常起决定性作用[1-5]。 因此,基于空间电磁环境数据,借助可视化技术充分显示电磁场分布尤为重要[6]。
在现行的电磁态势感知可视化系统中,文献[7]提出了采用Kriging 插值算法计算区域内单一频点或频段的场强分布,结合地理信息系统,将场强数据映射为图像,实现了场强分布态势的二维可视化。 解决了由点态势融合形成面态势的这一难点;文献[8]提出一种基于无线感知网络的信号覆盖探测算法.该算法首先通过随机部署的感知节点采集接收信号强度并进行高斯滤波处理;利用支持向量回归对采集数据进行变异函数曲线拟合,综合感知节点采样数据与插值点估计数据生成目标区域电磁态势;文献[9]针对海战场电磁态势的预测问题,提出一种基于改进粒子群(PSO)优化径向基函数(RBF)神经网络的海战场电磁态势预测方法。 该方法使用自适应惯性权重、模拟退火法和遗传算法对常规的粒子群算法进行改进,并采用改进粒子群算法优化RBF 神经网络参数,提高网络的学习效率和预测精度。 最后,对海战场电磁态势值之间的非线性映射关系进行仿真预测。 以上几个系统对于复杂环境下的电磁态势感知显示效果并不理想,仅有单一形式的可视化系统并不能全面的反映环境信息。
在充分考虑复杂电磁环境生成和虚拟生成环境条件建设情况下[10],利用高程模型和影像等数据,加载各类仿真元素,以现有实体装备为基础,通过多种信息感知传输手段、信息融合处理技术、地理信息展现技术及虚拟仿真技术等[11],设计一种从二维、三维空间等多个维度对电磁场进行可视化处理,实现了电磁分布态势、等值线等多种形式的电磁态势感知可视化系统。
2 总体设计
系统主要完成对空间电磁环境中的地形与电磁数据进行建模,解析并作可视化映射,从二维、三维空间等多个维度对电磁场进行可视化处理,实现了电磁分布态势、等值线、传播方向路径等多种形式的电磁环境可视化方法,该系统能够为用户提供一种更为高效的空间电磁环境可视化分析工具。 系统采用快速电磁传播计算方法或插值方法,完成任务场景中各辐射源的电波传播、覆盖、干扰效果计算和电磁频谱占用情况显示。 综合考虑不同频率、传播路径、天线形式和地形地貌等参数对战场电磁环境分布的影响,实现电磁传播和覆盖效果计算与显示,形成综合电磁态势效果。 包括模型管理、态势显示、地理信息管理、回放推演、系统管理5 个功能,如图1所示。
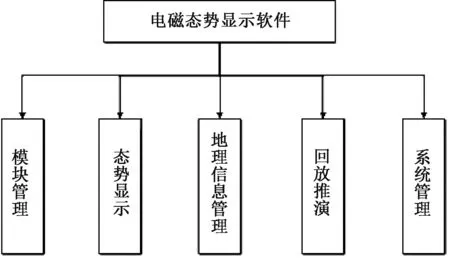
图1 功能组成
系统技术架构自上而下分为三层:表现层、业务逻辑层和数据访问层。
数据访问层通过外部接口读取地形数据和电磁数据;业务逻辑层是在获取数据的基础上,完成模型构建、电磁计算、空间电磁环境构设等功能;表现层是向用户呈现的电磁态势显示场景,包括:场强分布态势、电磁传播覆盖范围、电磁等值线等,并可根据用户需求进行场景导航、参数设置。 电磁态势显示系统体系架构如图2所示。
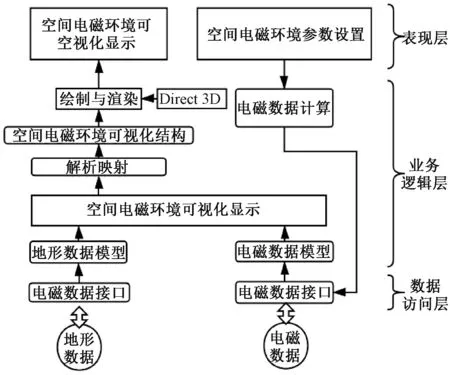
图2 系统架构
电磁态势显示软件工作流程:(1)首先启动程序,加载地图数据,读取任务规划数据,并完成地理信息相关数据的管理;(2)当收到训练仿真开始命令,读取任务规划系统发送的融合数据;(3)根据电磁模型计算,显示电磁综合态势,并将电磁数据送到态势显示系统;(4)当收到训练仿真结束命令,退出这次仿真推演,如果没有则继续读取融合数据进行电磁态势展示。 如图3所示。
3 模块设计及原理
3.1 模型管理模块设计
模型管理主要完成辐射源模型、电磁响应模型、地物/地貌电磁特性模型、电波传播模型等模型的配置管理,并且支持模型与各种算法的灵活选择配置。
3.2 地理信息管理模块设计
地理信息管理属于野战综合管理平台共性支撑模块,此处设计与任务规划系统地理信息管理模块设计一致。
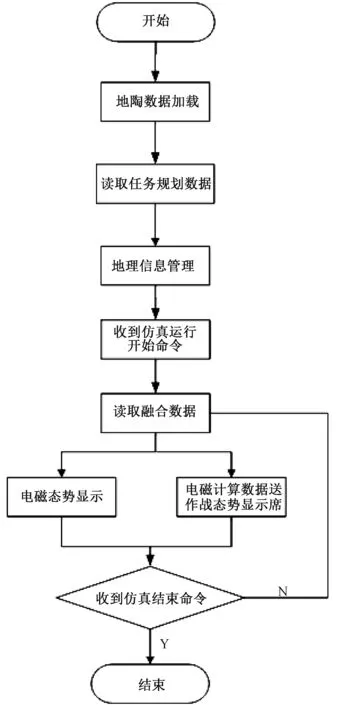
图3 系统流程
3.3 态势显示模块设计
电磁辐射的基本特征参量主要包括时间、空间、频谱、能量(场强)四个方面,除了这些基本特征外,考虑用户需求,进一步引入电磁信号的相位、极化方式等信号特征参量,电磁信号和其辐射主体进行关联。 在实际战场应用中,情况往往会非常复杂,由于地形和地物的影响往往会出现多径效应和阴影效应,多电台工作时还应充分考虑三阶互调或者其他干扰的情况。
态势显示模块由覆盖范围计算显示、场强线计算显示、电磁频谱占用情况3 个子模块构成,如图4 所示。
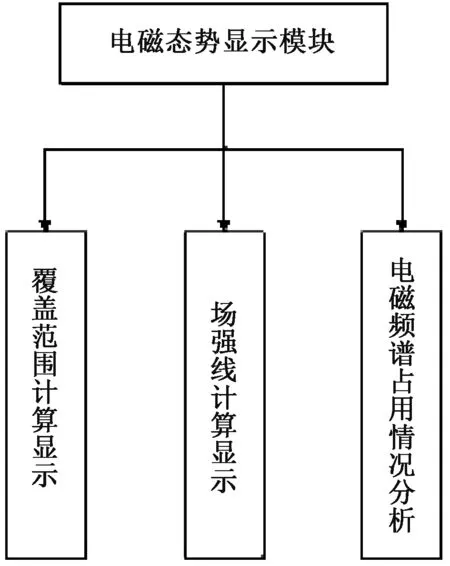
图4 态势显示模块
3.4 覆盖范围计算显示
综合考虑不同频率、传播途径、天线形式和地形地貌等参数对战场电磁环境的影响,实现电磁覆盖范围的计算和显示。
电磁场求解模型抛物方程(Parabolic Equation,PE)方法是利用电磁场波动方程的抛物线近似形式来计算电波传播的方法。
二维问题:考虑直角坐标系中三维波动方程中的任意电磁场分量ψ 与坐标y 无关,则有二维波动方程:



将式(3-1)代入到式(3-2)中得:

假设电波传播过程中,媒质折射指数n 几乎不随距离x 变化,即

则可以将式(3-3)分解为:
式中Q 称为伪微分算子,且:

因此得到以下两个关于x 的抛物方程:

式(3-7)是直角坐标系中,电磁波前向传播的抛物方程,后向传播式(3-8)在PE 方法中被忽略。对Q 作不同的近似形式即可得到不同计算仰角、不同精度的二维抛物方程模型。
三维问题:直角坐标系下,当电磁场时谐因子为e-iωt时,均匀无源区域内的三维标量波动方程为:

仍设电磁波主能量沿x 轴正向传播,场的谐函数表示

将其代入到(3-9)式得:
式(3-11)中,横向Laplace 算子为

仍假设电波传播程中媒介折射指数n 几乎不随距离x 变化,则式(3-11)可分解为:

其中伪微分算子Q 为:

式(3-13)中前后两个乘积项分别表示电波的前向传播和后向传播。 将Q 作合适的近似后即可得不同计算仰角、不同精度的三维抛物方程[12]。
3.5 电磁场可视化映射模型
电磁环境数据可视化实现主要包括:电磁环境数据建模、电磁统一模型数据的解析映射、电磁环境绘制渲染。 电磁环境数据流动如下图所示,电磁可视化过程首先对电磁环境原始数据进行统一建模[13],再经过解析映射及绘制渲染,将原始数据转换成易于被理解或接受的图像数据显示出来;同时,用户可根据可视化过程的分析结果与整个可视化过程各模块进行交互操作。
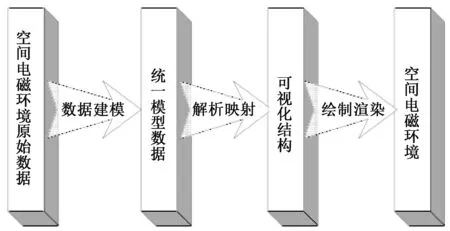
图5 电磁环境可视化映射模型图
3.6 基于B 样条分层离散插值电磁态势计算
通过电磁频谱监测系统与数据采集子系统获取的数据计算每个点的场强分布,为了形成区域连续的电磁态势,需要采用离散插值的方法进行处理。 由于受地形条件等因素的影响, 大量的观测和采样是在极不规则并且离散的测网下进行的。 为了更合理地对地球物理异常做出正确的解释, 在保持原有场特征的前提下, 有必要插值出均匀并且较密集网格下的数据。 B 样条分层离散插值方法可实现将离散并且稀疏的数据插值到均匀并且密集的网格上。
B 样条分层插值方法是利用B 样条改进控制点网格层的优化多层离散插值,以此来估计二维或三维均匀网格点上的离散值,使用三阶B样条可以同时保证很高的精度和计算效率。
离散数据插值是指用一组平滑的平面来拟合或者逼近离散或者是非均匀分布的数据采样,插值的目的是构造一组函数,例如平面或者体,该函数在任意点上都能求出值。 这使得某一值域中的任意点的值都可以根据已知的离散点平滑地推导出来。
用Ω = {( x,y) | 0 ≤x ≤l,0 ≤y ≤m} 表示一个在目标二维平面域x-y 上的一个子域。考虑一组在三维空间中的点P= {( xc,yc,Ic)}。其中, ( xc,yc) 是在子域Ω 上的离散点, Ic是该点上对应的参数值。
定义Φ 为一个在 ( l + 3) × ( m + 3) 的子域Ω 中,控制点间隔为1 的整数控制点网格。同时定义Φi,j为在控制点网格Φ 中位于网格( i,j) 上的参数值,其中,i=-1,0,…,l +1,j=-1,0,…,m + 1,则一个参数值逼近函数f 可以由这些控制点定义出
其中, Bu,Bv为归一化的三阶B 样条基函数;

和薄板样条以及弹性体样条不同的是,B 样条是受局部控制的,这一特性使得即使针对很多的控制点都能高效地进行计算。 特别是三次B样条的基是受有限项支持的,即改变控制点Φi,j仅仅影响对其中一个4∗4 的局部邻域的逼近。
子域Ω 上控制点网格Φ 的密度将直接影响逼近函数的形状。 Φ 的密度越稀疏,每个控制点所能影响的离散数据点集P 中的点就越多。这将导致很多点被捆绑在一起以至于导出过度平滑的逼近函数f,这也将导致估计精度的损失。然而,如果Φ 的密度变密集,每个控制点的影响将被局限在一个很小的邻域中,估计的局部性会增强,很可能导致很多局部的起伏。
在多层B 样条逼近中,某一组分层次的定义在不同大小控制点间隔上的控制点网格层Φ1.....ΦL被采用。 在当前的应用下,我们采用从最稀疏的控制点网格Φ1开始,逐步减半其控制点间隔直到最密集的控制点网格ΦL。 最稀疏控制点网格Φ1上的逼近函数f1将提供一组很平滑的估计,在这种估计下,对已知离散点集P的估计将存在很大的残差。 具体来讲f1针对离散点集P 中的每个点(xc, yc, Ic)留下了Δ1Ic=Ic- f1( xc,yc) 的残差。 在下一级更密集的控制点网格Φ2上,采用函数f2来逼近这一残差P1={( xc,yc,Δ1Ic)}。 于是,逼近函数的和(f1+f2)会带来更小的估计残差Δ2Ic= Ic- f1( xc,yc) -f2( xc,yc) ;接下来以此类推,用再下一级的控制点网格估计此时的残差直至最密的控制点网格ΦL。 总的来讲,对在分层样条函数的第K 层,可以用该层的控制点网格Φk来逼近参数Pk={(xc,yc,?kIc)},以此推导出一个逼近函数;最终的逼近函数f 被定义为各层逼近函数的总和。

最密集控制点网格ΦL的密度控制着最终逼近函数f 对各点的逼近精度。 当ΦL的密度相对于离散点的分布足够密集时,最终逼近函数f能无偏差的通过每个已知的离散数据点。 然而,因为可能存在的采样噪声,ΦL密度的选择需要既保证逼近精度,又要平滑可能的噪声。 在实际工作中采用离散点之间最小点距的1/2 为最密集控制点网格ΦL点距;同时,采用离散点之间最大点距为最稀疏控制点网格Φ1点距。
3.7 场强线计算显示
基于辐射源先验信息和实时监测数据两种方式,利用辐射源模型、电磁响应模型、地物/地貌电磁特性模型、电波传播模型等完成场强计算并显示。 为了将存放在数据库或文件中的场强数据在电子地图上进行显示,本系统利用系统图层分层存放的特性,在系统平台上绘制显示电磁环境监测中得到的场强数据的等值线图形。
在地理学中,等值线图是最常用的图件之一,用来表示那些具有连续分布特征的自然现象。 在图形学上,等值线是指x-y 坐标平面上f x,y( ) = c 的轨迹分布线。 这里的c 为某一常数值,该值所表示的物理意义可以是地形高程数据,温度场中的温度数据,气象上的气压数据,电磁场中的场强数据等。
场强线图通常采取规则矩形网格(Rectangular Grids) 和不规则三角网络(Triangulate irregular Network)对原始数据进行插值。 系统主要应用规则矩形网格DTM 自动绘制等值线的原理,其主要包括以下两个步骤:一是利用DTM 的矩形网格点的高程内插出网格边上的等值点,并将这些等值点按顺序排列(即等值线的追踪);利用这些顺序排列的等值线点的平面坐标进行插补,即进一步加密等值点并绘制成光滑曲线(即等值线的光滑)。 以下就是规则矩形网格法绘制场强线过程的框图,如图6所示。
4 系统测试效果
4.1 装备部署可视化
装备部署态势通过军事地理信息系统根据训练方案计划进行军标标绘,显示敌我双方作战力量、编队组成、参战兵力和武器装备等作战单元部署位置、活动轨迹和相关属性信息,其示意如下。
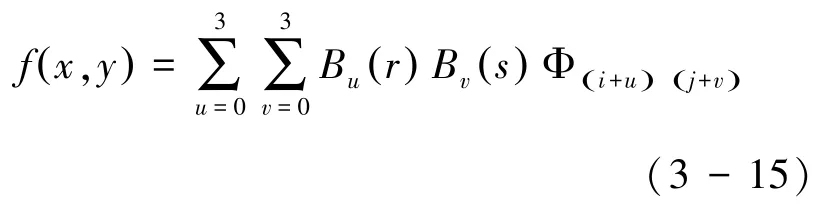
4.2 通信畅联区可视化
能够根据装备电磁计算仿真数据、电磁频谱检测车数据库、导调控制系统采集数据以及用频谱设备数据,使用包络线或填充图显示通信畅通区。 能够在二三维地图中显示通信链路通信畅通情况和受扰情况;通信链路分为短波、超短波、微波链路;能够分别显示正向链路及反向链路;能够图形化方式显示链路通信状况,包括链路通畅、轻度干扰,中度干扰,严重干扰等。
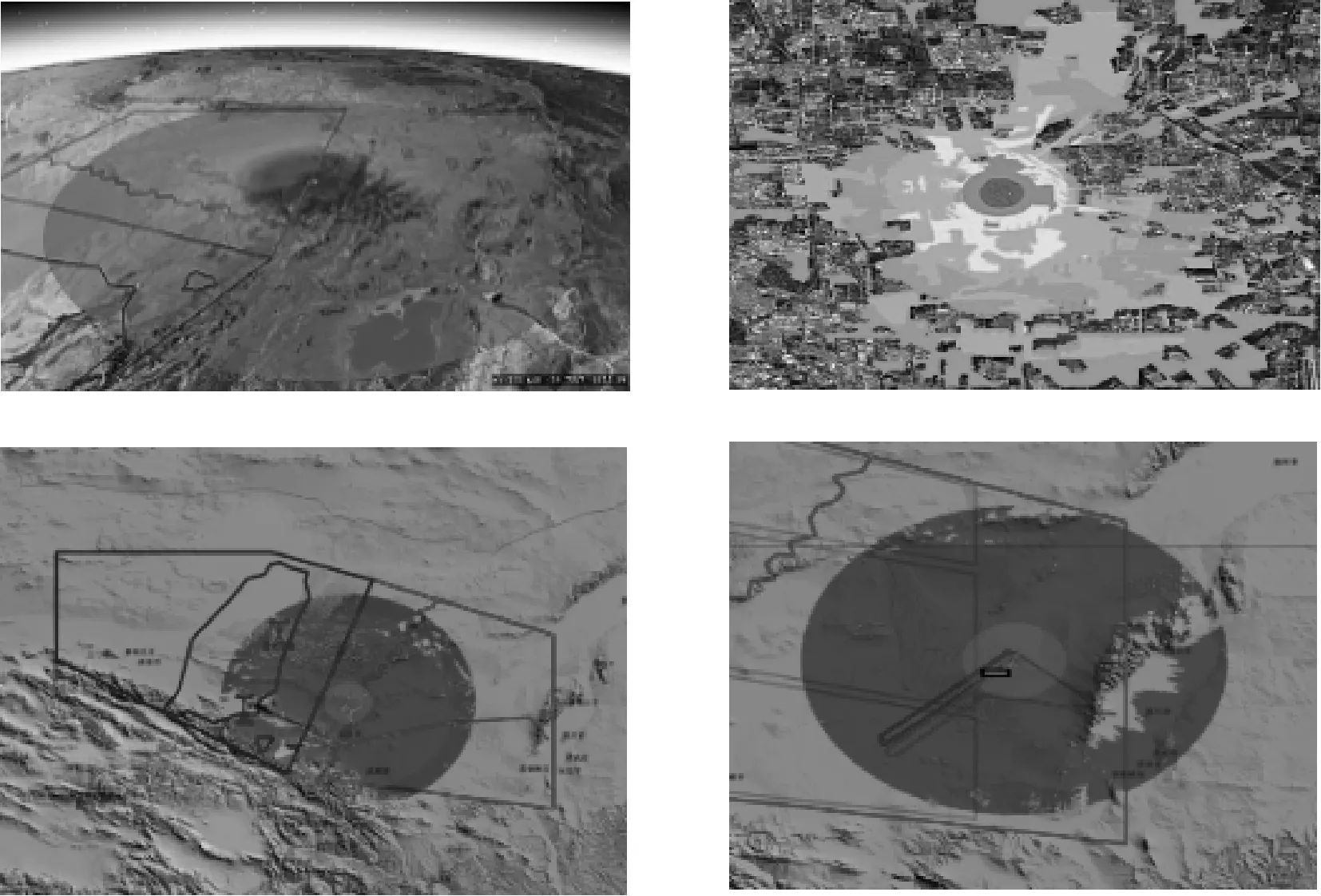
图8 通信畅联区可视化
4.3 电子侦察区或监测范围可视化
能够根据装备电磁计算仿真数据、控制系统采集数据以及用频谱设备数据,使用包络线或填充图显示电子侦察区或监测范围。
侦察范围显示:能够在二三维地图中显示侦察设备对辐射源的有效侦察范围。 支持移动侦察设备的侦察范围显示。
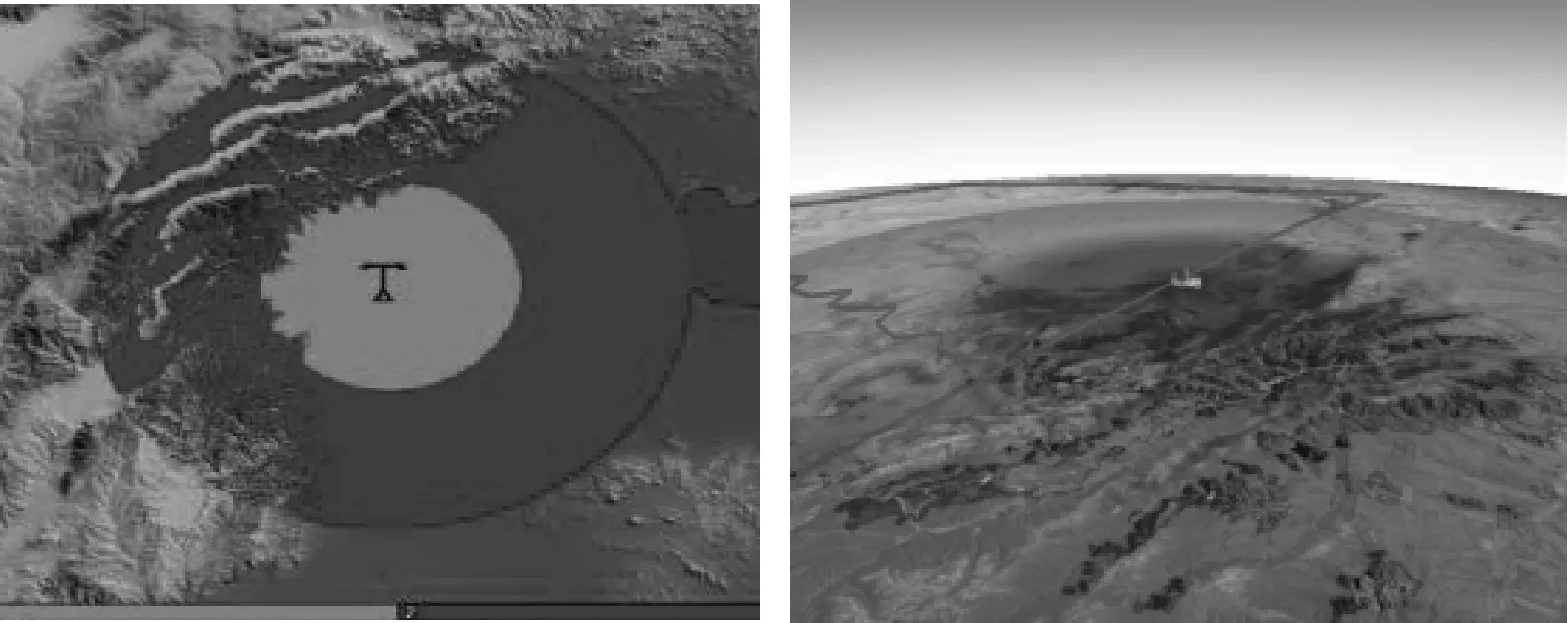
图9 电子侦察区或监测范围显示示意图
4.4 电磁干扰区可视化化
能够根据装备电磁计算仿真数据、导调控制系统采集数据以及用频谱设备数据,使用包络线或填充图显示电子干扰区。 能够在二三维地图中显示干扰设备对目标的有效干扰范围。 支持移动干扰设备的干扰范围显示。
4.5 电磁态势可视化
根据时间、空间、频谱、能量(场强)四个方面,通过基于辐射源先验信息和实时监测数据两种方式,利用辐射源模型、电磁响应模型、地物/地貌电磁特性模型、电波传播模型等完成场强计算,生成并显示电磁态势。 实现基于二维及三维综合电子地图的电磁态势显示功能。
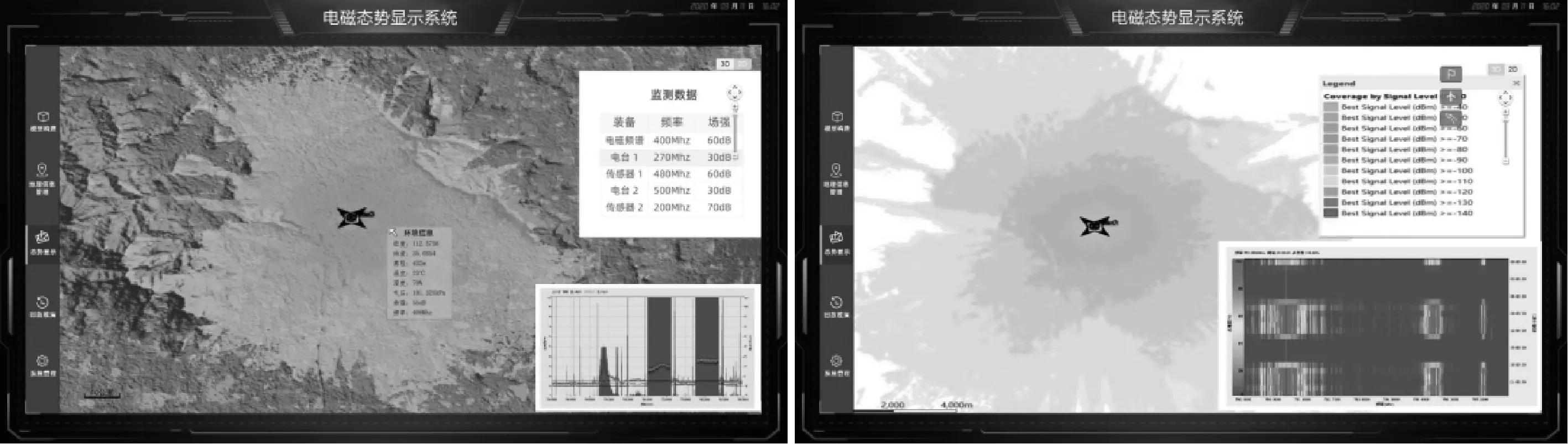
图12 电磁态势可视化
5 结论
系统完成了对空间电磁环境中的地形与电磁数据进行统一建模,解析并作可视化映射,从二维、三维空间等多个维度对电磁场进行可视化处理,实现了电磁分布态势、等值线、传播方向路径等多种形式的电磁环境可视化方法,为用户提供了一种更为高效的多种形式相结合的空间电磁环境可视化分析工具。
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21 02:10:26
河北理科教学研究(2020年1期)2020-07-24 08:14:30
汽车与安全(2020年1期)2020-05-14 13:27:19
中国外汇(2019年19期)2019-11-26 00:57:36
铁道通信信号(2019年6期)2019-10-08 09:02:40
中国化肥信息(2019年5期)2019-06-25 00:52:28
铁道通信信号(2018年3期)2018-04-19 02:32:49
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27