
基于评分法的某新型船舶操舵控制系统基本可靠性分配∗
2021-04-06 07:13
舰船电子工程 2021年3期
(海军工程大学 武汉 430032)
1 引言
船舶操舵控制系统是船舶航行过程中极其重要的一个系统,它既能操控船舶航行过程的方向,保证航行过程中航向的准确性,又能将船舶航行过程中的导航数据及时采集与并通过相关控制算法处理,进而控制船舶持续有效的航行,并保证航行的安全性和经济性[1~3]。现在,大多数学者对控制系统的研究多为控制算法的研究[4~6],而对其可靠性的研究很少。随着自动舵系统朝着模块化、自动化、信息化、智能化发展以来,不仅要求其具有较好的鲁棒性和全面的功能,更要求其有较高的可靠度,因此对船舶操舵控制系统的可靠性研究具有重要意义。
在对操舵控制系统的结构和可靠性冗余设计的过程中,可靠度是一个非常重要的性能指标,其中可靠度分配可以提供系统设计的可靠度指标,可以暴露系统设计中的薄弱环节及关键单元和部位,为指标监控和改进措施提供依据。评分分配法又称“目标可行性法”或“综合因子法”。通过对影响产品可靠性的几种因素评分,并对评分值进行综合分析以获得各单元产品之间的可靠性相对比值——分配系数,再根据分配系数给每个单元产品的可靠性指标进行分配的方法[7]。
2 船舶操舵控制系统基本结构和功能
如图1为某新型船舶操舵控制系统结构与连接图,由驾驶室操纵台、舵机舱操纵台、供电系统、指令控制箱、伺服控制箱、液压机构、舵角反馈机构等组成。该系统能完成的操舵模式主要有三种:简单(应急)操舵、随动操舵、自动操舵。操舵方式主要根据海况,航行任务以及航行环境决定。该新型操舵控制系统为模块化设计,主要体现在操纵台上,操纵台上主要由随动手轮模块、综合控制模块、舵角与航向复示模块、报警模块、显控模块等组成。其中显控模块是完成自动模式下的航向自动、航迹自动与迹向自动三种控制模式的人机交互模块。系统中驾驶室操纵台与舵机舱操纵台互为硬件相似余度结构,即结构完全一致,作为备用。在模块级别,系统采用四余度结构,当一路信号、两路信号甚至三路信号发生故障时,系统仍然能够正常工作。这种结构设计提高了系统的可靠性,但在可靠性设计的合理性上存在一定问题,对于可靠性较高的单元过高的冗余设计会给系统带来负担,并降低了系统的基本可靠性,对设备维修保养的成本增加[8]。
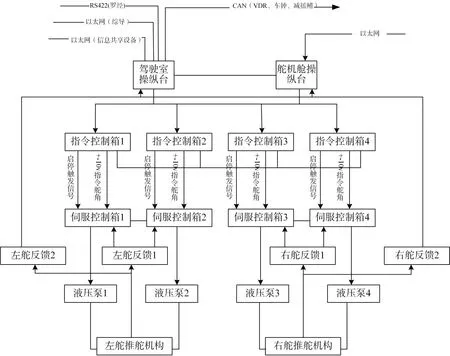
图1 某新型操舵控制系统结构与连接图
3 系统基本可靠性框图建立
可靠性分为基本可靠性与任务可靠性,建立系统基本可靠性框图就是把系统的所有模块看作是串联结构[9]。对于该新型操舵控制系统,主要分析的对象为完成控制信号所需要的模块,因此在对系统进行可靠性建模的时候不考虑伺服结构和液压机构。因此该系统主要由随动手轮模块、综合控制模块、显控模块、指令信号发送与接收模块、反馈模块共计五大模块组成。随动手轮模块包括舵轮与轴角采集装置,四冗余设计集中在一块板子上。综合控制模块包括综合控制板、功率驱动板和信息接口板,每种板件各四块。显控模块包括按键板、显控单元MCU板和7寸屏显示驱动板,该模块为双冗余备份,反馈模块为轴角采集装置,四冗余设计集中在同一板件。
该新型操舵控制系统为分布式控制型结构,并且控制系统组件多为电子元器件,其失效分布符合如图2所示的浴盆曲线,即可以用指数分布进行计算。
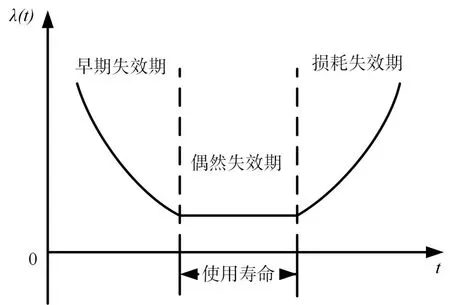
图2 浴盆曲线
设五大模块的可靠度函数分别为R1(t)、R2(t)、R3(t)、R4(t)、R5(t),则根据串联系统可靠性模型能表示出该系统可靠度为

根据系统的组成和模块间的相互关系,建立系统基本可靠性框图如图3所示。
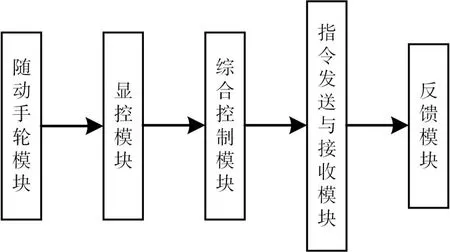
图3 某新型操舵控制系统基本可靠性框图
4 评分分配方法应用与结果
4.1 评分因素
评分分配法主要考虑的评分因素有复杂程度、技术成熟水平、工作时间、环境因素,由于操舵控制系统为可维修设备,故要考虑维修可达性与危害程度因素。下面为每一项要素评分准则,评分越高说明其可靠性越差。
1)复杂程度。对于操舵控制系统各组成模块的基本元器件数量越多,复杂度评分也就越高。最复杂的评分为10分,则指令发送与接收模块评分为10分。将该系统的各个模块的电路原理图对照实物并计算,可得系统各模块复杂度评分表如表1所示。
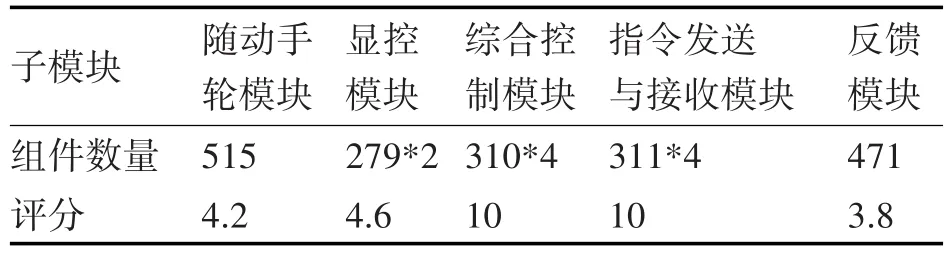
表1 某新型操舵控制系统复杂度评分表
2)技术成熟水平。技术成熟度分为设计技术成熟度、材料技术成熟度和工艺成熟度。并且每种成熟度等级相应分为成熟技术、改进技术和新技术。该系统能够在实际船舶上应用,说明其材料和工艺制作都为成熟工艺,但从技术层面来分析,手轮随动模块、舵角反馈模块以及指令发送与接收模块为成熟技术,在最初的自动操舵系统上已经得到应用。随着控制方法的不断升级,综合控制模块为改进技术,显控模块为最新得到应用的技术,技术成熟度评分较高。文献[10]的技术成熟度评分参考表,并将三种技术成熟度评分加权平均,得到综合评分。其成熟水平评分表如表2所示。
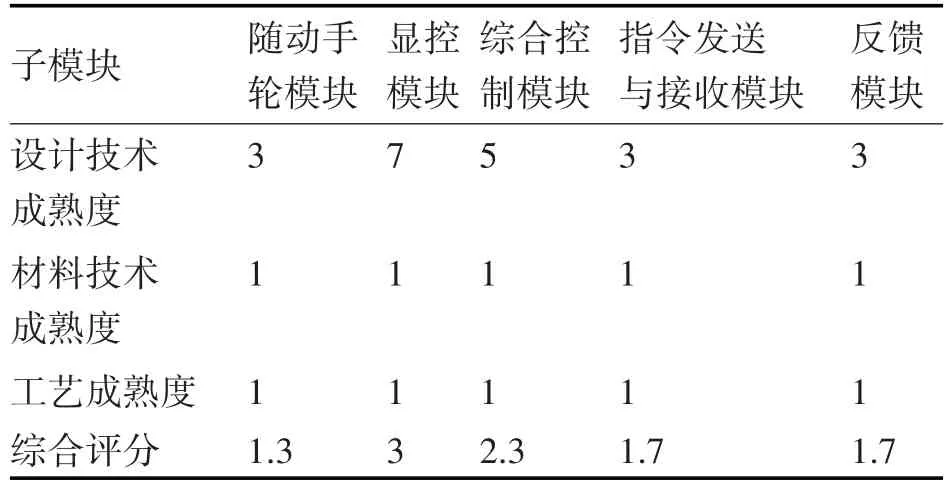
表2 子模块技术成熟水平评分表
3)工作时间。手轮随动模块只应用在随动操舵模式下,显控模块应用在航向自动、航迹自动和迹向自动三种操舵模式下,而其余三大模块在船舶航行过程中一直应用。不妨设随动手轮模块的工作时间为1个单位,文献[7]的工作时间评分准则,根据子模块在同级模块最长工作时间的比例进行评分,则工作时间评分表如表3所示。
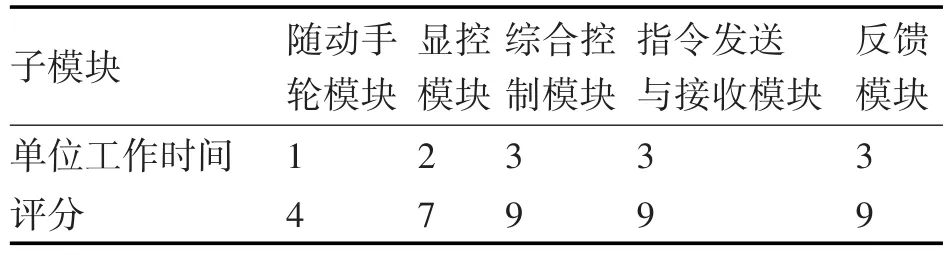
表3 子模块工作时间评分表
4)环境因素。参考GJB299C-2006电子设备可靠性预计手册[10],将船舶环境分为舰船良好舱内Ns1,舰船普通舱内Ns2,和舰船舱外Nu。驾驶室操纵台内的随动手轮模块、显控模块和综合控制模块为Ns1环境,而舵机舱内的指令发送与接收模块和反馈模块为Ns2环境。
5)风险优先数(RPN)。RPN=ESR*OPR,参考GJB_Z1391——2006的故障模式影响的严酷度等级(ESR)和概率等级(OPR)评分准则[11],可得出本系统不同模块的评分。
4.2 评分分配方法与评分因素计算
评分分配的基本模型如式(2)所示:

操舵控制系统要求可靠性要求较高,一般三年进行一次小修,一般在航时间为全年的1/3,设每天工作时间为12h,则该操舵控制系统要求的最低平均无故障工作时间为365*12=4380h,由于即要求的系统失效率λs=228.3*10-6·h-1。根据上述分配模型与4.1中的评分因素选择,得到综合评分分配结果如表4所示。

表4 某新型操舵控制系统评分因素分配结果表
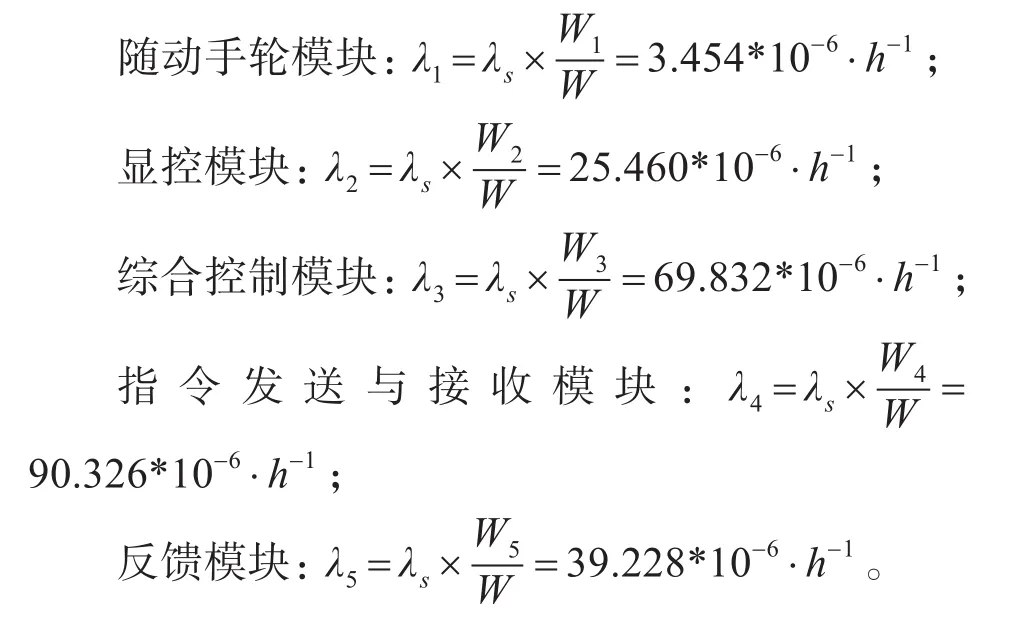
4.3 各子模块基本可靠性分配结果
根据评分分配的数学模型及表4,可以计算得出该新型操舵控制系统子模块的基本可靠性分配结果如下:
5 结语
依据该新型船舶操舵控制系统,通过针对该系统子模块所处环境、工作时间、技术成熟程度等因素采用评分分配法对操舵控制系统进行基本可靠性分配,将可靠性指标量化分配给各个子模块。对未来操舵控制系统的设计和可靠性优化提供依据,并且能针对失效率较高的薄弱环节,即指令发送与接收模块进行改进和优化,并且为后续的可靠性试验和评估打下基础。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
学苑创造·B版(2018年12期)2018-03-04
创新作文(1-2年级)(2017年7期)2017-12-26
高中生学习·高三版(2014年3期)2014-04-29
数学大世界·小学低年级辅导版(2010年12期)2010-11-27
