
一种分布式传感器协同探测方法研究
2021-04-04 05:05赵庆璐贾朝文
航天电子对抗 2021年1期
赵庆璐,贾朝文
(电子信息控制重点实验室,四川成都 610036)
0 引言
随着战场环境的日趋复杂,在未来信息化战争中,单传感器已经无法满足现代战争的需要,多传感器协同可极大提升系统的探测能力,是未来信息化作战的必然要求。从武器装备发展规律来看,作战系统网络化是未来高新技术战争的特点,利用高度发达的信息网络技术,将战争从“以传感器为中心”转化为“以网络为中心”,通过传感器组网实现多传感器信息融合,为指挥员提供实时的战场空间感知,代表了未来探测系统的发展趋势[1-3]。
近年来,传感器水平、计算机数字处理能力和网络技术的不断提高,为传感器组网系统的实现提供了可能。同时,为充分发挥传感器组网系统的探测能力,需构建与之匹配的协同探测网络,本文提出了一种“去中心化”的分布式协同探测方法,通过构建基础骨干网和协同应用网,实现传感器的协同探测。
1 网络构建
传感器协同探测系统面临多种战术任务和非协作的目标环境,其组网能力直接影响系统在网络信息作战体系下的应用效能,若采用“中心化”的网络管理方式,会引入“中心化”所固有的运算能力有限、处理效率低、中心节点异常等问题,无法满足实时、高精度的目标探测需求。因此,本文构建了一个“无中心”的分布式传感器协同探测网络:网络中的每个节点地位对等且以扁平式拓扑结构相互连通和交互;不存在任何中心化的特殊节点和层级结构;每个节点均承担网络路由、数据传播、发现新节点等功能[4]。
1.1 基础骨干网
在初始状态下,按照“全域最近邻”原则构建基础骨干网络:每个节点均与距离最近的节点建立点对点通信,当存在多个子网时,在不同的子网选择距离最近的节点建立点对点通信,生成全域基础骨干网,节点利用通信连接交互平台的惯导、传感器工作状态、探测的目标等信息。
将基础骨干网络用G=(V,E)表示,各平台对应集合V的网络节点,节点间的通信链路对应集合E的边,节点的最大通信距离为R,eij表示节点i与节点j间的通信连接,dij表示节点i与节点j间的距离,子网间的通信连接用集合U表示(U⊂E),则构建的基础骨干网满足约束:∀eij∈E,dij≤dik≤R||eij∈U(k∈V)。如图1所示,线型①∈E表示骨干网中的点对点通信连接,线型②表示可与新节点建立的潜在连接。

图1 基础骨干网
1.2 协同应用网
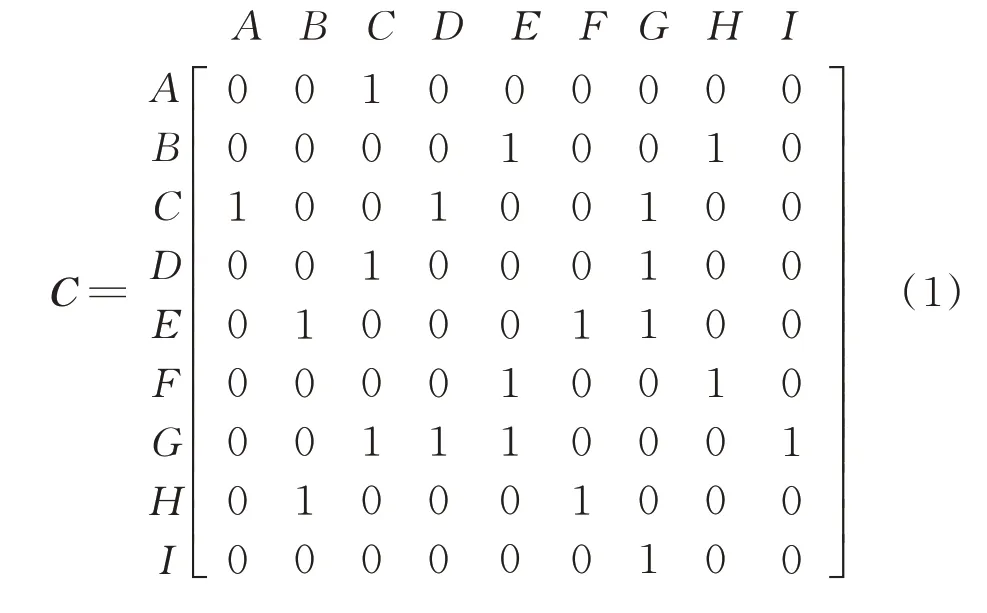
在建立的骨干网络基础上,基于协同探测任务,以最大化协同效能为准则在网内进行传感器分配,并基于传感器分配结果实时、动态地构建和调整应用网络。如图2所示,传感器节点C、D和B、H分别执行不同的协同探测任务,节点C、H为建立在协同应用上的虚拟中心节点,同时为满足协同任务需求新建立了①、②2条点对点的通信连接。

图2 协同应用网
图2所示的协同应用网络生成的连接矩阵C如式(1)所示,矩阵中元素“1”表示对应的行列节点间建立了点对点的通信连接,“0”表示对应的行列节点间未建立点对点的通信连接。当前协同任务结束后,自动回归至骨干网,等待下一个协同任务建立新的网络拓扑。传感器协同探测的需求会根据战场电磁信号环境的变化而不断调整,因此在不同时刻协同应用网络的拓扑结构会发生变化。
2 传感器分配
协同应用网的构建是基于传感器分配的结果,即将目标分配给不同传感器进行协同探测,并在对应的传感器间建立点对点的通信连接。传感器分配的准则为:利用网内某种传感器组合使得对目标的探测效能最优。目标协同探测效能与传感器能力(测向精度、探测距离、距离精度等)、目标与传感器的相对位置关系、协同传感器间距等因素相关[5-8],以无源协同探测为例,建立传感器协同探测误差模型,如式(2)所示。其中,传感器的测向精度为σθ,传感器间距离为L,θ1、θ2分别表示目标信号方向与基线(传感器连线)间的夹角,β=θ2-θ1为目标与2传感器形成的交会角,如图3所示。

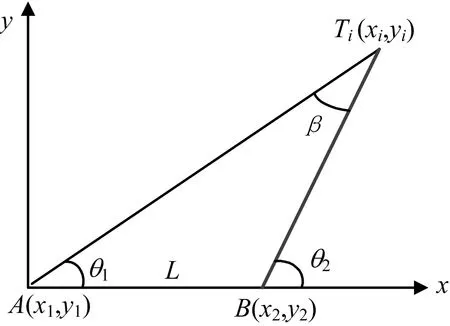
图3 误差模型示意图
协同探测效能与探测误差R成反比,若连接矩阵C选择传感器A、B对目标Ti进行协同探测,即在传感器A、B间建立了点对点通信连接,则对目标Ti的探测效能如式(3)、式(4)所示:

当某个传感器需执行多个协同探测任务,且受限于传感器资源的约束,任务存在冲突时,协同探测效能的评估在原误差模型的基础上,增加对目标威胁等级的考量,效能评估模型如式(5)所示,m表示需协同探测的目标个数,ωi表示目标Ti的威胁等级。

3 算法描述
在上述分布式传感器协同探测系统中,网内各传感器地位平等,均可根据战术需求、战场环境的变化及本平台的目标探测结果,在网内发起协同探测任务。在复杂战场环境下,受限于传感器本身的资源限制,不同协同探测任务间存在冲突的风险。
为解决各节点间的任务层竞争问题,本文从利用传感器对战场目标进行协同探测这一实际应用出发,以最大化编队协同探测效能为准则,在网内建立了“发起即信任、信任即响应”,“高威胁、先响应”的智能合约。该合约由事件驱动,运行在网内各节点上,各节点按照合约达成统一的认知,并在此基础上实现本平台的任务调度、传感器资源控制、数据处理等功能,从而构建一个动态、有序、鲁棒的协同探测系统。详细处理流程如图4所示。

图4 协同探测处理流程
流程描述如下:1) 各传感器按1.1节所述构建协同探测基础骨干网,并进行威胁目标感知与共享;2)基于威胁目标感知结果,人工或各传感器自主选择协同探测目标;3) 按第2节所述模型评估不同传感器组合对目标进行协同探测的效能,并基于效能最大化准则向对应传感器分配协同探测任务;4) 网内传感器收到协同探测任务后,基于“发起即信任、信任即响应”的合约,判断是否与当前正在执行的任务存在资源冲突;5) 若存在资源冲突,基于“高威胁、先响应”的合约,进行任务分配调整;6) 若不存在资源冲突,则构建协同应用网,进行传感器资源实时调度和融合跟踪;7) 当战场环境发生变化,网内各传感器可重新生成协同探测目标,分配协同探测任务并动态调整协同探测网络。
4 仿真分析
采用Matlab对上述分布式传感器协同探测系统进行仿真分析,网内节点的数量及相对位置关系按照1.1节所述,分布在东向20~100 km、北向0~40 km区域范围内,各传感器的位置分别为:A(25,10)、B(85,35)、C(35,25)、D(55,35)、E(70,20)、F(80,5)、G(53,20)、H(95,15)、I(55,5)。在东向0~120 km、北向80~180 km区域内模拟生成4个目标,目标位置分别为:目标1(10,100)、目标2(30,140)、目标3(60,170)、目标4(110,150)。假设各目标的威胁等级相当,各传感器具备同时多目标的探测能力,按照第2节所述的传感器分配模型进行仿真,传感器目标分配结果如图5所示,其中传感器间的最大通信距离设置为50 km。
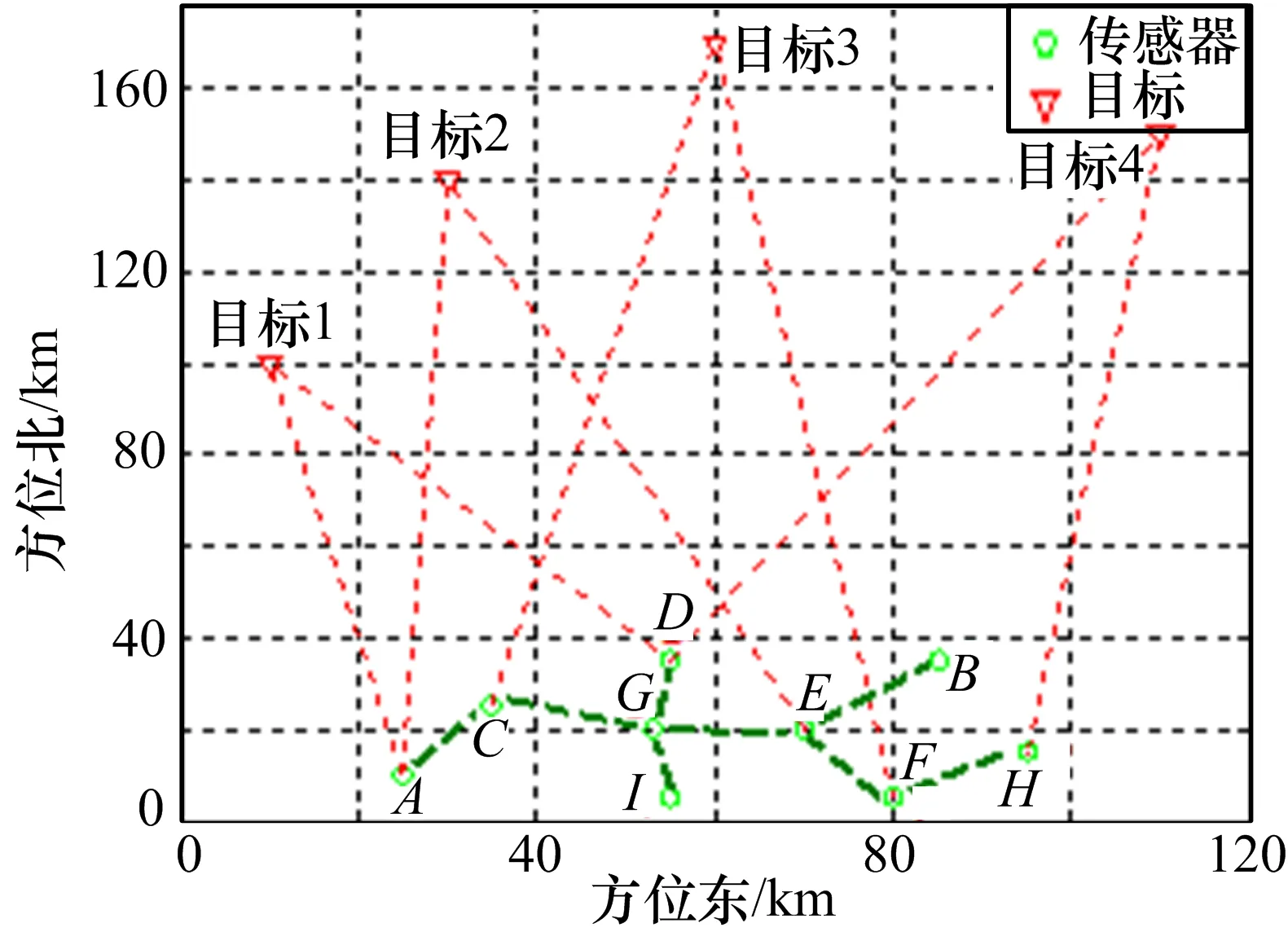
图5 传感器目标分配
各传感器基于分配的协同探测任务实时构建协同应用网络,建立点对点的通信连接,实现对目标的协同探测。设传感器的测向精度为0.5°,目标1-4均为空中运动目标,Ma数为0.7,航向角分别为90°、135°、180°、225°。基于传感器分配结果,对上述4个目标的协同探测性能进行仿真,时长为60 s,数据率为2 Hz,仿真结果如表1、图6所示。由表1可知,效能评估值越大,对目标的探测误差越小。

表1 协同探测效能仿真

图6 目标探测性能
5 结束语
本文提出了一种分布式传感器协同探测方法:首先按照“全域最近邻”原则构建基础骨干网,然后基于最大化协同探测效能建立传感器分配模型,并根据传感器目标分配结果动态自适应地调整网络拓扑,构建协同应用网,实现对目标的协同探测。场景模拟和仿真分析验证了该方法的有效性、合理性。该方法可实现对目标实时、高精度的协同探测,且具有较好的鲁棒性。同时,考虑到未来网内传感器数量的不断增多、类型更加多元,为达到更好的探测性能,在群体智能方面还需作进一步的研究。
猜你喜欢
民族文汇(2022年13期)2022-05-07
北京航空航天大学学报(2021年9期)2021-11-02
水上消防(2021年3期)2021-08-21
科学家(2021年24期)2021-04-25
通信产业报(2020年12期)2020-04-26
中国计算机报(2020年9期)2020-03-25
环球时报(2018-09-13)2018-09-13
通信产业报(2018年21期)2018-08-20
通信产业报(2017年46期)2018-01-22
职业·中旬(2016年11期)2017-02-21
