
基于改进型粒子群算法的全扭矩换挡冲击抑制研究
2021-04-02 07:02龚俊杰谷金良龚莎蔡志华
农业装备与车辆工程 2021年3期
龚俊杰,谷金良,龚莎,蔡志华
(411201 湖南省 湘潭市 湖南科技大学 机电工程学院)
0 引言
电动汽车可以解决能源短缺[1]和环境污染问题,因此,减小电动汽车换挡时的冲击度[2]一直是电动车的研究重点。近年来,研究人员对减小汽车换挡时的冲击度做了大量研究[3]。文献[4]以AMT 变速箱系统为研究目标,将整个换挡过程进行划分,并对换挡执行机构进行了拉格朗日建模,对换挡冲击的原因进行了研究;文献[5]自主研发的无离合器无同步器以提升电机工作效率为研究目标,开展了基于驱动电机的换挡控制方法和整车综合换挡规律等关键技术的研究,很好地提升了电动汽车的换挡品质;文献[6]采用永磁同步电机控制技术和综合换挡决策,进行了深入的理论研究和实验验证,针对换挡过程中PMSM多状态控制模式的动态控制和模式平稳切换的要求,设计了基于模糊滑模的SVPWM-DTC 的PMSM 控制策略,提升了换挡品质;文献[7]给出了电机和变速箱一体化设计方案和可靠实用的实验测试方法;文献[8]利用ADAMS 和dSPACE等采集数据并分析问题产生机理,通过Meca 标定软件标定控制参数,确定了最优PWM 指令,减小了换挡末期的冲击。提出并验证基于机电耦合控制的变模冲击抑制方法;文献[9]针对双模耦合驱动系统的独特构型,建立其传动总成模型,揭示出加装扭转减振器以减小变模冲击的动力学机理;文献[10]重新对换挡过程进行了梳理,提出了全扭矩换挡控制方法,将换挡过程分为卸载、摘挡、电子同步、机械同步、挂挡和加载6 个过程,其中,对车辆冲击度较大的是卸载、电子同步、加载3 个过程,且这3 个过程的控制对象都是驱动电机。本文正是基于此提出用控制驱动电机的方法,从而达到减小车辆换挡时冲击度的目的。对永磁同步电机的控制,矢量控制依然是车用永磁同步电机最主要的控制方式[11],所用控制算法多采用多闭环控制结构,一般包含转速环、位置环、转矩环。控制的重点在于直轴、交轴电流的控制和对无传感器转子磁场方向的估计。根据控制目标的直、交轴分量之间不同的关系,可以获得常用的4 种矢量控制的方法:直轴电流为0、最大转矩电流比控制、功率因素等于1、恒磁链控制[12]。现有的永磁同步电机控制方法在面对不确定工况有着各自的优缺点。随着智能技术的进步,研究人员将生物启发式的智能算法应用于PMSM 控制[13],为电机控制研究开辟了新思路。如文献[14]利用粒子群算法的群体合作智能搜索与快速迭代优势,提出了基于粒子群算法的永磁同步电机控制,该方法具有收敛快、操作容易和意义明确等优点,但也存在一些缺点:参数选择耗时,难以找到具有一般特点的优化参数;优化易陷入局部最优区。针对粒子群算法存在的缺陷,学者们进行了研究,并提出了许多改进措施。新加坡南洋理工大学的suganthan 团队提出一种基于完全学习型的粒子群算法[15],其核心思想是借助其它粒子的历史最优信息来更新粒子当前自身的速度和位置值,从而保证了粒子群体多样性,该算法在优化问题上具有独特的优势。
本文以改善永磁同步电机输出性能进而改善汽车换挡时的冲击度为目标。围绕永磁同步电机矢量控制转速环调节器设计的问题,将完全学习型粒子群算法应用于转速环调节器的设计中,并与传统粒子群算法进行对比研究.通过实验对比,完全学习型粒子群算法具有较强的收敛性和多样性,验证了完全学习型粒子群算法对速度环调节的优越性,改善了电机的输出特性,减小了换挡时驱动电机对车辆的冲击度。
1 数学模型
1.1 PMSM 数学模型
考虑到永磁同步电机具有理想的对称结构;为简化分析,假设PMSM 为满足以下条件的理想电机:
(1)忽视转子铁芯的磁路饱和效应;(2)忽略转子铁芯的涡流和磁滞损耗;(3)气隙和磁密在空间呈正弦分布。其旋转坐标系下的方程为
式中:ud,uq——定子电压的直轴和交轴分量;Ld,Lq——直轴和交轴的同步分别电感;id,iq——定子电流的直轴和交轴分量;we——电机的电角速度;ψf——永磁体磁链。
1.2 速度环控制器模型
电机调速系统一般由电流环、位置环和速度环组成,而速度环控制对于调速系统来说是保证系统速度响应的重要环节。对于一般的调速系统而言,运动方程如下所示:

式中:ω——转子速度;iq——电流指令信号;TL——负载转矩;J——转动惯量;B——电机的摩擦系数;KT——电机的转矩系数。速度环调节器采用PID 控制法,其表达式如下所示:

式中:KP,Ki,Kd——控制器的比例、积分、微分项系数;e——速度差值。edτ电机的控制系统和速度环所用参数如表1 所示。
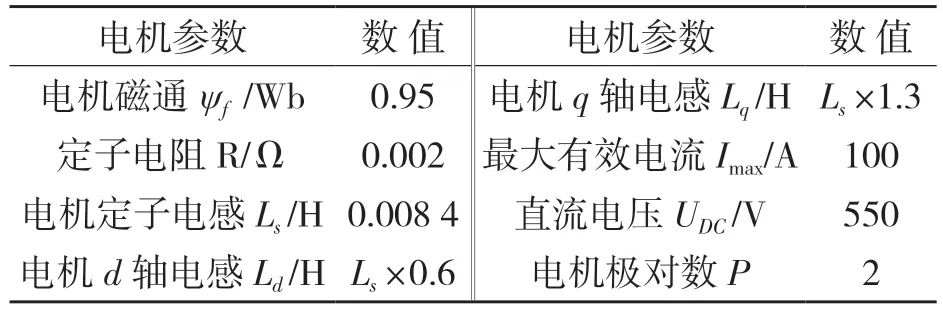
表1 永磁同步电机部分参数Tab.1 Partial parameters of permanent magnet synchronous motor
由于永磁体的磁通保持不变,所以,本文采用 id=0 的控制策略。永磁同步电机转子磁场定向矢量控制系统由转速环和2 个电流环组成。速度环通过速度自动调节器提供iq的指令值,2 个电流环的2 个电流指令值分别通过经典PI 调节器获得dq轴控制电压ud与uq,然后将电压变换到αβ静止坐标系后,采用SVPWM 技术控制电压型逆变器实现对永磁同步电机的控制。如图1 所示。
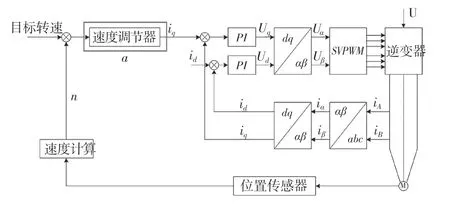
图1 电机矢量控制系统图Fig.1 Motor vector control system diagram
2 粒子群算法
2.1 标准粒子群算法
粒子群算法是一种新兴计算方法,其基本思想源于鱼群和鸟群等社会群体生物的觅食现象。假设粒子群体规模大小为M,每个粒子在D 维空间中搜索,设粒子(i=1,2,…,N)当前位置为Xi={xi1,xi2,…,xid},飞行速度 为vi={vi1,vi2,…,vid},粒子通过调整自己当前位置搜索新解,每个粒子都记住自己的最优解,记作Pbestid。种群经历过的最优位置,即目前搜索到的最优解,记作Gbestid。每个粒子都有一个速度,记作V,定义如下:

式中:ω——惯性权重;c1,c2——调节Pbestid和 Gbestid相对重要性的参数;rand()——生成介于0 和1 之间的随机数。得到粒子的下一个位置:

2.2 完全学习型粒子群算法
完全学习型粒子群是新加坡南洋理工大学的Suganthan 教授团队专为解决传统粒子群算法易于陷入局部最优而提出的新模式粒子群算法。该算法采用独特的搜索方法,任何一个粒子速度可以由粒子群体中的任一个体极值Pbest 来更新。该学习方法通过保证群体的差异性,有效阻碍了早熟收敛情况出现,从而能更好地确保群体的多样性。完全粒子群算法速度信息及位置信息更新如下:
以上教学中,教师发现学生在评价人物时拘泥于武松这个角度的信息,遗漏了老虎的关键信息。教学时以“难道表现武松只有从武松身上下手”为引导的关键点, 让学生继续思考,促使学生要全面地思考问题。
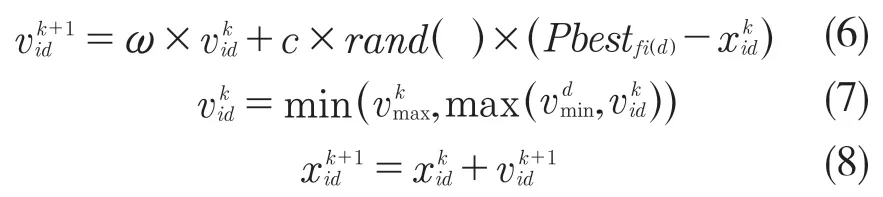
式中,Pbestfi(d)表明可能是其中一个粒子个体极值对应的维,也可能是第i 个粒子自身个体极值对应的维,这个取决于学习概率pc,不同的粒子具有不一样的随机学习概率pc。基本思想为:对于粒子i 的每一维,产生一个随机数,如果该随机数大于pci,则这一维就向该粒子自身的Pbest 学习,否则这一维就向群体中其它粒子Pbest 学习,其学习流程如图2 所示。
将目标转速和实际转速当做永磁同步电机理想输入模型和实际输入模型,通过实际模型转速输出与理想模型目标转速的差值构造适应度函数,如图3 所示,对应于图1 中“a”部分。利用完全学习型粒子群算法对全局收力强和收敛速度较快的特点对参数进行寻优,进而达到改善电机输出性能的目的。为验证本文中提到的完全学习型粒子群算法的有效性,于优化前和传统粒子群算法进行了对比。传统粒子群算法仿真参数设置:转速n 即为粒子的解,空间维数设为1,最大迭代次数为300 代,所用粒子群算法粒子规模为60。ω∈[0.9 0.4],c1=c2=1.494 45。完全学习型粒子群算法设置基本与传统粒子群相同:ω∈[0.9 0.4],c1=c2=2。
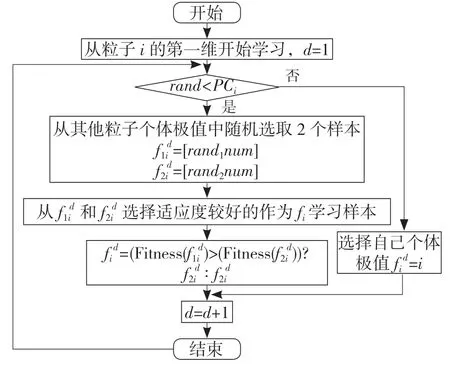
图2 完全学习型粒子群算法流程图Fig.2 Flowchart of comprehensive learning particle swarm algorithm
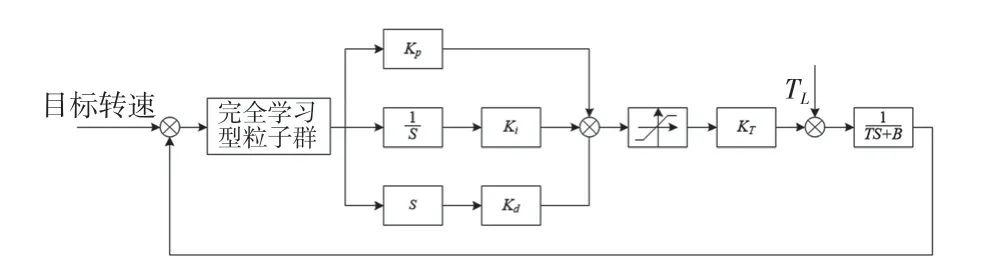
图3 速度环控制器Fig.3 Speed loop controller
3 实验结果与分析
一套硬件在环系统被用来验证本文所提到的方法。如图4 所示,该系统主要由dSPACE模块、整车控制器、负载箱、CAN 卡和工控机LabVIEW 界面等5 台设备及其内部软件组成。
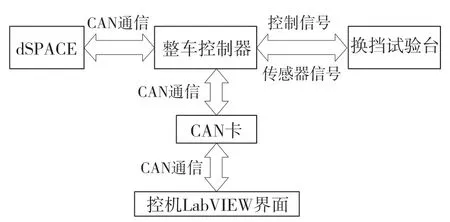
图4 硬件在环实验系统组成框图Fig.4 Block diagram of hardware-in-the-loop experimental system
基本思路如下:首先将电机、电池、变速器和整车动力学系统虚拟模型下载到dsPACE 模块中,组成被控对象的虚拟仿真模型,所用参数如表2 所示。此时,dsPACE 模块和整车控制器之间通过CAN 总线发送数据给dsPACE 模块,控制其中各个虚拟模型的运转,在仿真过程中虚拟模型计算出的各种数据也通过CAN 总线发送给整车控制器。

表2 2 挡AMT 纯电动汽车整车部分参数Tab.2 Partial parameters of 2-speed AMT pure electric vehicle
与此同时,整车控制器通过CAN 卡将实验采集所需数据发送给LabVIEW 工控机,工控机通过LabVIEW界面负责对数据实时显示和保存,且通过CAN总线控制整车控制器实行命令操作。上位机通过CAN 总线向电机控制器发送控制指令,控制换挡试验台的工作。如图5 所示,电机控制器向上位机实时发送电机状态参数,上位机将收到的信息进行解析后实时显示在界面上。通过上位机即可知道换挡的结果和电机的工作状态,如电机的转矩、转速和换挡时汽车的速度、加速度和冲击度,而且实时显示电机的各种故障状态。
3.1 空载急加速急减速工况实验结果
在车辆空载时,从静止开始急加速急减速换挡,其实验结果如图6 和图7 所示。为了进行比较,也给出了优化前、传统粒子群算法优化后和完全学习型粒子算法优化后的实验结果。

图5 换挡试验台Fig.5 Shift test bench
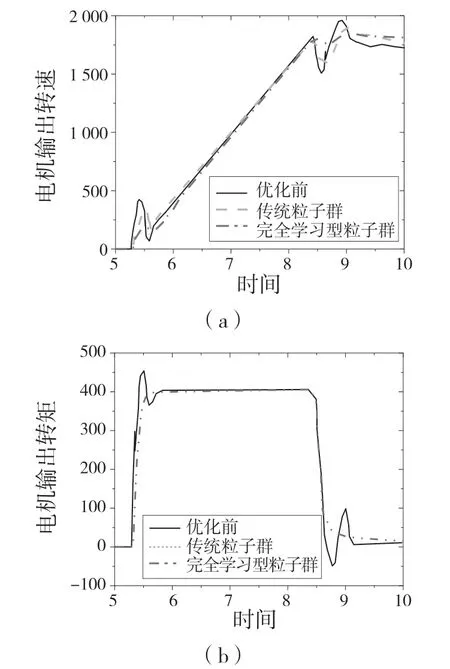
图6 空载时电机实验结果Fig.6 Motor experiment results at no load
在未用算法优化时,对于电机而言,在电机转矩突升和突降阶段,由于电机转速的突变(如图6 中的(a)图和(b)图所示),电机的转矩和转速存在较大的超调,并逐渐衰减震荡至目标值,衰减震荡持续时间大约为0.6 s;当使用传统粒子群算法优化的速度环调节器时,对于电机而言,无论是转速还是转矩,尽管和优化前一样出现了一定程度的震荡,但超调明显得到改善。但在6~8 s 阶段,电机的输出转矩高于其他2 种情况,这是由于粒子群算法误收敛导致的。在使用完全粒子群算法优化的速度环调节器时,利用完全学习型粒子群算法收敛快的优势,使得电机的实际转速可以很快地接近目标转速。对于电机而言:电机的转矩无论是超调和震荡都得到了明显改善,转速既实现了快速响应的目标,也没有像传统粒子群算法那样出现误收敛。

图7 空载时车辆实验结果Fig.7 Vehicle test results with no load
3.2 满载时急加速急减速工况实验结果
在车辆满载时,从静止开始急加速急减速换挡,其实验结果如图8 和图9 所示。为了进行比较,与空载时相同,也给出了优化前、传统粒子群算法优化后和完全学习型粒子算法优化后的实验结果。
与车辆空载时的实验结果相似,优化前,当电机出现突升和突降时,不管是电机转矩和转速都出现较大的振动和超调且振荡时间较长,这会对电机输出轴造成较大冲击。使用传统粒子群算法优化后的速度环调节器后,不管是对于电机的转速还是转矩都有一定的改善作用。与空载相同的是,如图9(b)所示,由于粒子群算法在全局寻优方面的不足,使得转矩出现了误收敛现象。
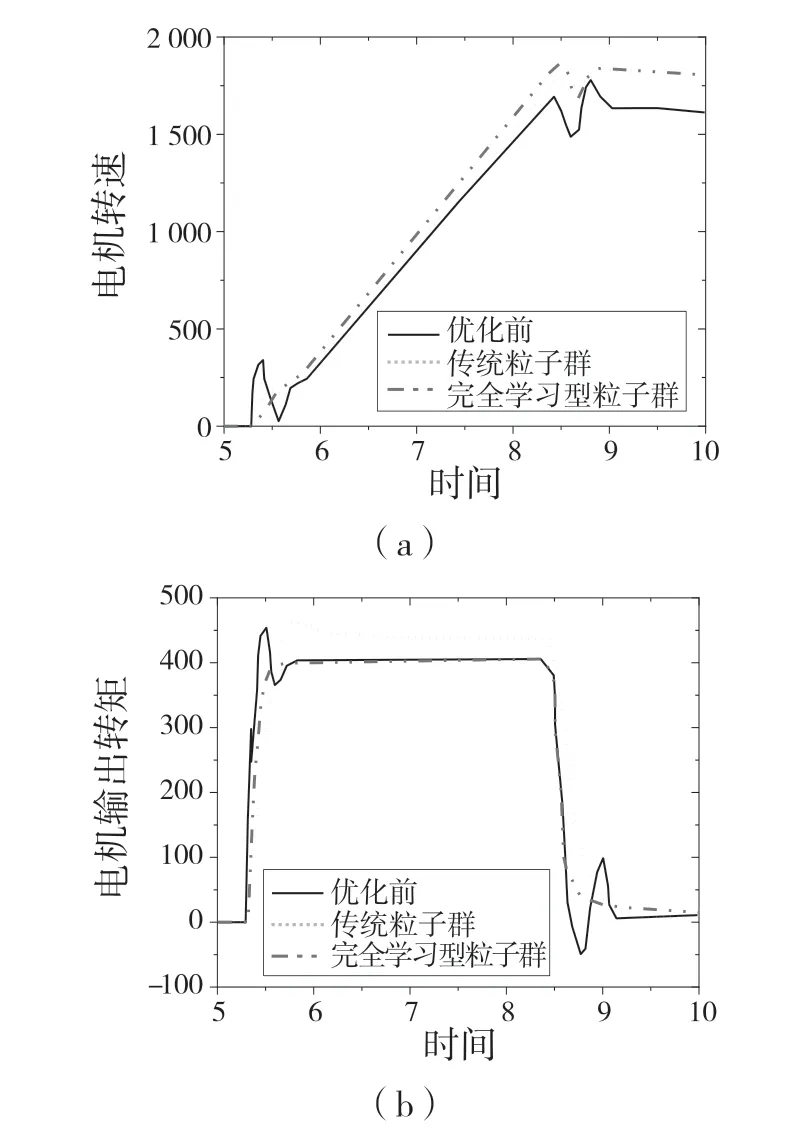
图8 空载时电机实验结果Fig.8 Motor experiment results at no load
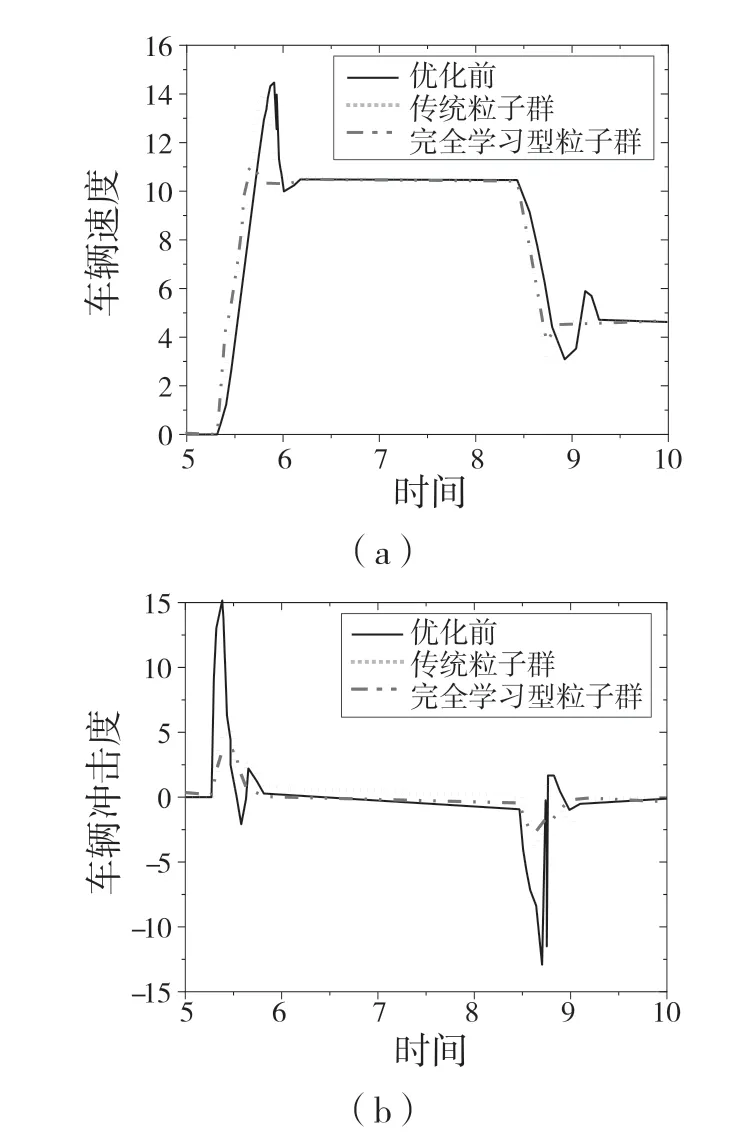
图9 负载时车辆实验结果Fig.9 Vehicle test results under load
在引入完全学习型粒子群算法优化以后,对电机和车辆都有较大的改善,也未像传统粒子群那样出现误收敛现象,能够快速地收敛到稳定状态,只是出现了轻微的振荡和小幅度的超调。超调和振荡都得到了较好的抑制,对电机的输出轴的影响也比较小。
优化前,当电机出现突升和突降时,车辆的速度和冲击度波动也较大,冲击度超过了10 m/s3的允许范围,极大影响了换挡时的舒适性,在使用传统粒子群算法优化后,车辆的冲击度都有一定的改善作用。与空载相同的是,如图9(b)所示,由于粒子群算法在全局寻优方面的不足,尽管最大超调得到明显改善,但在换挡时,振荡还是较明显。在引入完全学习型粒子群算法优化后,不管是车速还是冲击度都得到明显改善,大大提高了乘车的舒适性。
4 结论
本文针对电动汽车换挡时由电机引起的冲击,基于2 挡AMT 传动系统设计出一种完全学习型粒子群算法优化的电机转速环控制器,利用一套硬件在环系统,实现了电机对传动系统冲击的仿真研究。仿真结果表明,采用完全学习型粒子群算法优化后的速度环控制器,不管是对电机的输出特性的改善还是车辆冲击度的抑制都有较大的作用。由于影响电动汽车换挡时的冲击度的因素不只有驱动电机,还有同步器、整车传动系统的间隙等其它原因,今后工作将逐个考虑,并通过实车进行试验。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
甘肃教育(2020年2期)2020-09-11
人大建设(2019年4期)2019-07-13
汽车电器(2014年8期)2014-02-28
