
一种改进型光伏系统的最大功率点跟踪技术研究
2021-03-31 08:56牛雪莹张广德屈红军金金
微型电脑应用 2021年3期
牛雪莹, 张广德, 屈红军, 金金
(1.青海绿能数据有限公司, 青海 西宁 810000;2.国网青海省电力公司信息通信公司, 青海 西宁 810008)
0 引言
随着人类工业文明快速发展,对环境的保护意识逐渐增强,传统能源煤炭和石油地下储备有限,而且传统能源对环境不环保,所以,近年来新能源开发和利用越来越受到关注。各类新能源范畴中,太阳能因其取之不尽用之不竭的特点成为新能源的一大支柱,而光伏发电是利用太阳能的最有效途径之一,如何解开高效率利用太阳能这个困扰,这就需要最大功率点追踪(MPPT)控制技术[1]。
光伏MPPT技术的核心在于MPPT算法的研究和创新,当下,许多光伏学者和专家对此研究层出不穷,MPPT技术日益成熟。文献[2-3]中提出的改进型电导增量法MPPT控制策略通过对步长的实时修正解决了跟踪精度和响应速度之前的矛盾,但是,实际工程中,电导增量法存在实现难度大的缺点。文献[4]所提出的一种恒压法结合扰动观察法复合控制策略同样可对稳态精度和跟踪速度进行兼顾。文献[5-6]所采用的牛顿插值法通过拟合曲线可近似计算出最大功率点位置,但是存在计算量大的问题。文献[7-9]所采用的模糊控制、细菌觅食算法和模糊指数趋近律等控制算法,这些智能算法控制模型较为复杂,目前多用于理论研究和实验室仿真层面,距离实际推广还有一定距离。在前人研究的基础之上,通过阅读大量文献,本文针对传统定步长扰动观察法的缺陷,提出了一种可以实时调节步长的变步长扰动观察法控制策略。
1 光伏电池模型和其输出特性
1.1 光伏电池的数学模型
光伏电池(PV)的数学模型,如图1所示。
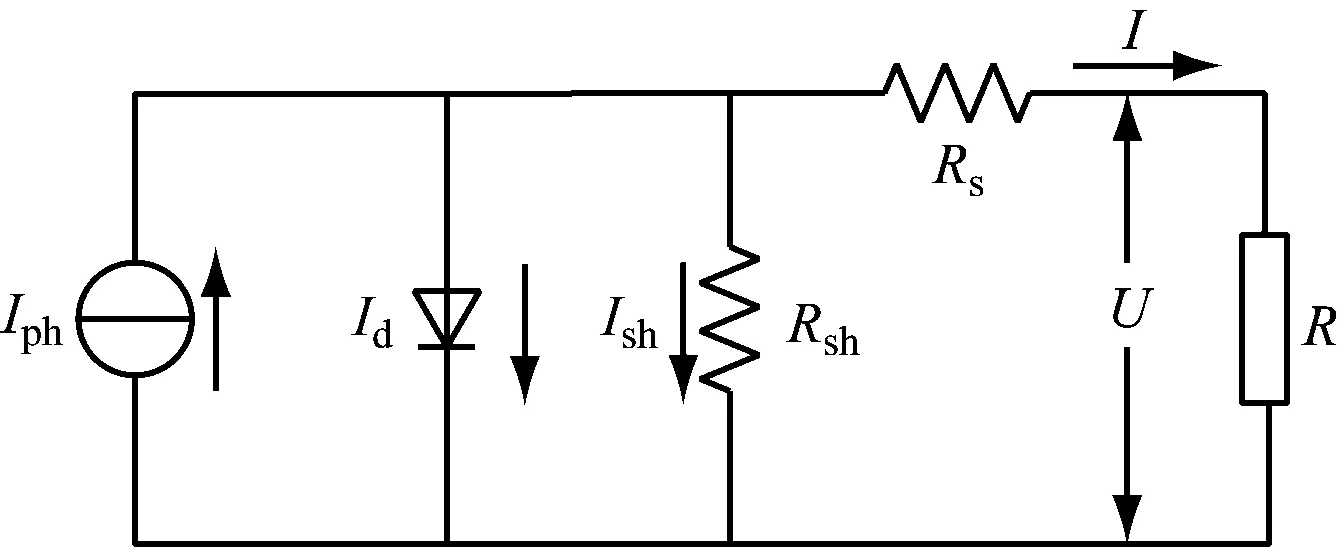
图1 PV组件电路图
PV电池的I-U关系,如式(1)。
(1)
标准情况下(S=1 000 W/m2,T=25 ℃)开路电压(Uoc)、短路电流(Isc)、最大功率点对应电流(Im)、最大功率点对应电压(Um)的值由光伏电池供应商提供。如下给出简化式,如式(2)—式(4)。

(2)

(3)
(4)
1.2 PV的输出特性
根据简化后的式(2)、式(3)和式(4),功率-电压(P-U)曲线、电流-电压(I-U)曲线,如图2所示。
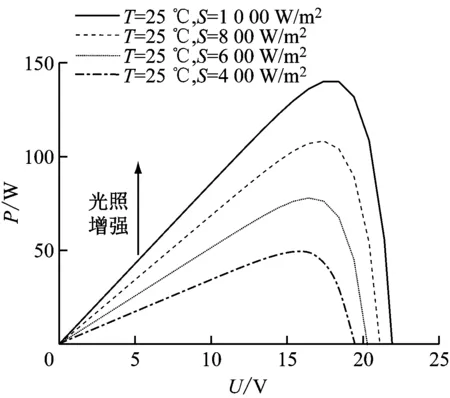
(a) PV的P-U曲线
由图2可知,当温度(T)和光照强度(S)一定时,P-U曲线是一个单峰值抛物线,存在一个MPP,且T一定时,S越大,输出功率越大;S一定时,T越小,输出功率越大。
2 传统电导增量控制
扰动观察法,是最常用的一种控制算法之一,简称P&O控制算法。扰动观察法工作原理是周期性地给PV输出电压施加一个扰动(ΔU),并且判断下一个时刻的功率变化情况,如果下一时刻的功率增大,则扰动方向正确且继续保持此方向不变,反之,则换向扰动,如此循环,直到追到最大功率点为止。P&O的工作流程,如图3所示。
传统P&O算法的局限性在于步长ΔU选择困难问题。如果步长太大,待光伏系统稳定后可能造成稳态震荡问题,从而降低了能量转换效率;如果步长选择太小,则会造成跟踪速度缓慢,在外界环境突变时,动态响应性能下降,表现为反应迟钝。
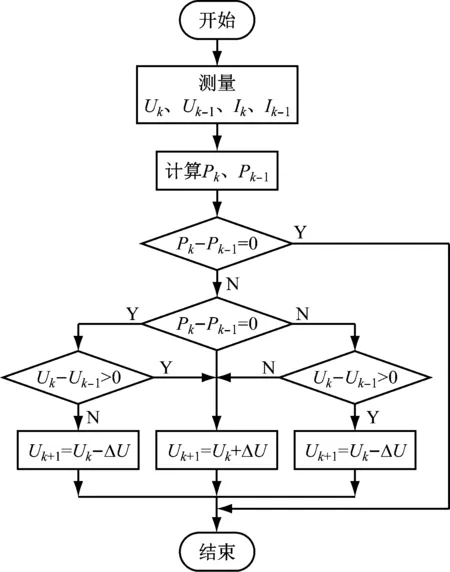
图3 P&O控制流程图
3 改进型MPPT控制策略
为了解决定步长扰动法的动静态矛盾问题,这里提出了一种改进型变步长MPPT控制策略。
由图3的光伏曲线可知,当Pk-Pk-1>0时,实际工作点位于MPP的左侧;当Pk-Pk-1<0时,实际工作点位于MPP的右侧;当Pk-Pk-1=0时,实际工作点已经位于MPP点。本改进型算法根据功率的变化可以实时调节跟踪步长,以λ=β|(Pk-Pk-1)/Pk|为步长,其控制流程图,如图4所示。

图4 改进型P&O算法流程图
其中,图4的步长调节因子β的值可以由abs(ΔP)的大小按式(5)关系确定,如式(5)。
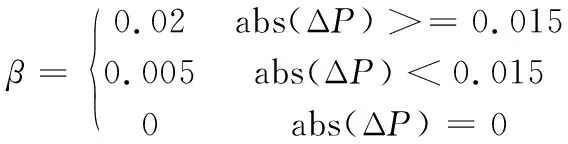
(5)
从图4流程可以看出,相对传统定步长扰动法而言,新型P&O算法可以根据实际工作点离最大功率点的位置,实时调节步长,当离MPP较远的时候,计算出一个较大步长进行追踪,用来加快动态响应速度;当离MPP较近时,计算出一个小的扰动步长,来精确定位MPP,用来防止稳态震荡;当追到MPP时,步长此时为0,如此循环。
4 基于改进型MPPT控制策略Simulink平台仿真
在Simulink平台上搭建基于复合MPPT控制策略的仿真模型,参数设置具体如下:Sref=1 000 W/m2,Tref=25 ℃;C1=145 uF,C2=420 uF,L=20 mH,R=40 Ω;S=1 000 W/m2,T=25 ℃时,Pmax=150.12 W,Uoc=25.37 V,Um=20.17 V,Isc=8.12 A,Im=7.44 A;设置仿真时间为1 s,基于改进型MPPT控制策略总体Simulink平台仿真模型,如图5所示。
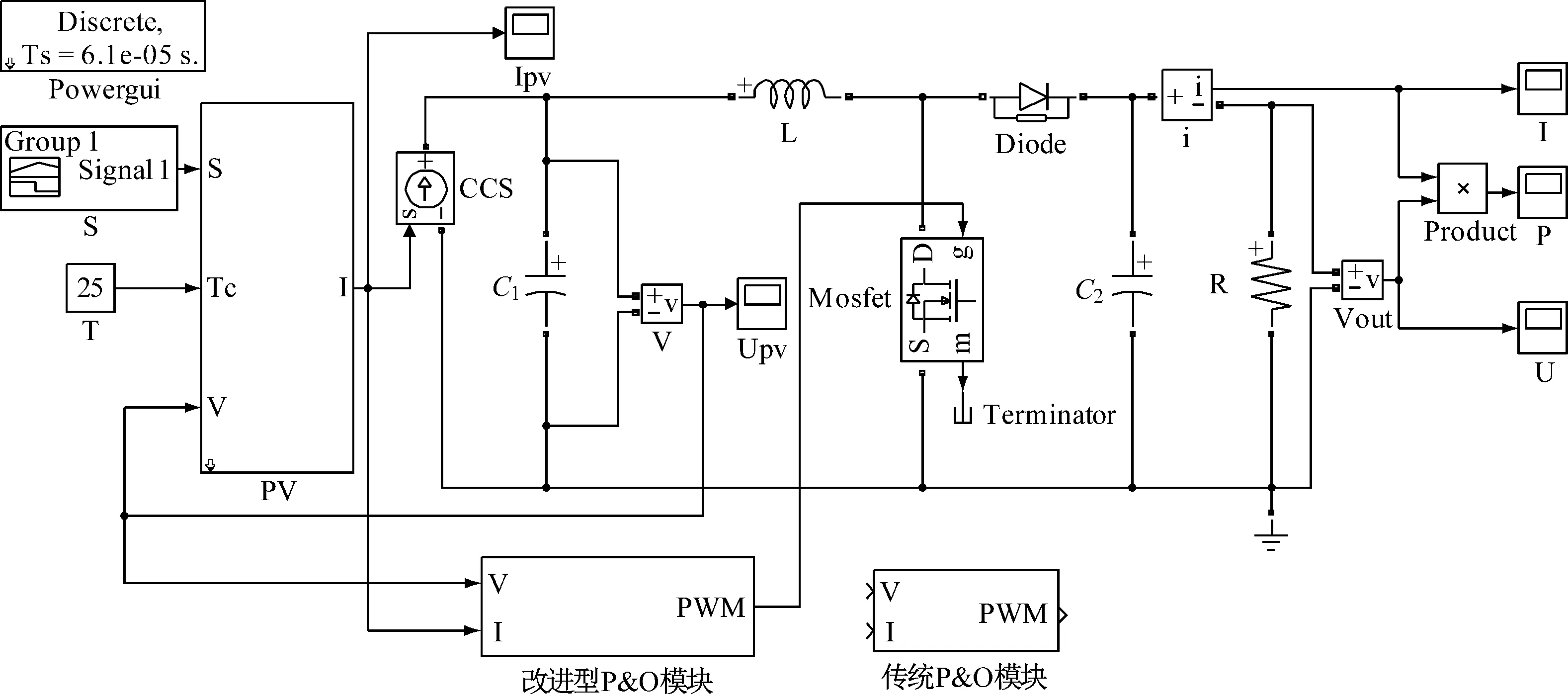
图5 基于改进型P&O算法的Simulink总体模型图
在Simulink仿真平台上,当T=25 ℃时,S变化设置为:0~0.5 s,S=1 000 W/m2;0.5~1 s,S=400 W/m2。传统的P&O算法和改进型P&O算法控制条件下的输出功率,如图6、图7所示。
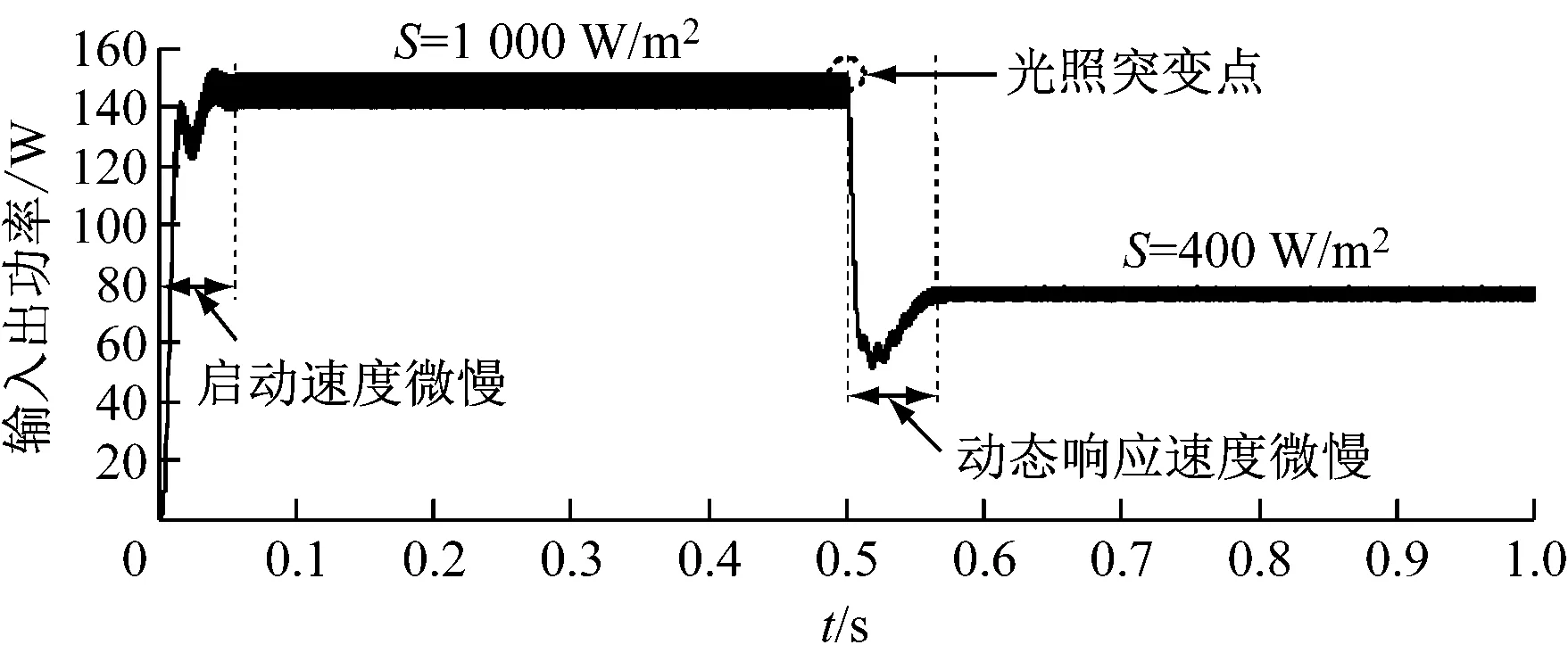
图6 传统P&O算法控制条件下的输出功率
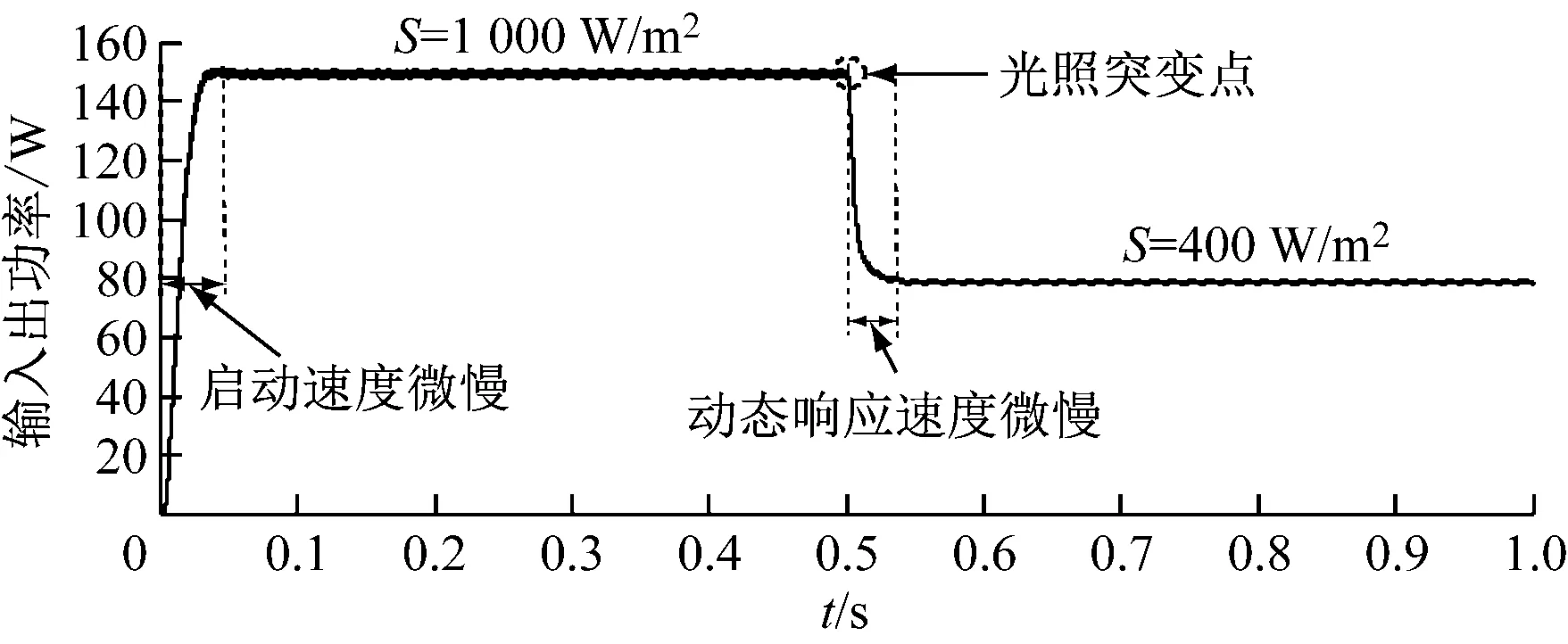
图7 改进型P&O算法控制条件下的输出功率
由图6可知,在初始启动阶段,传统P&O算法到达稳态用时约为0.066 s,动态特性略差,在t=0.5 s时刻,S=1 000 W/m2突变S=400 W/m2,跟踪到新的稳态用时为0.081 s,待稳定后,输出功率存在明显震荡,震荡范围79.90~76.13 W之间波动,震荡幅度相对较大,造成了能量流失;通过图7可以看出,采用改进型P&O算法,启动到稳态用时仅仅为0.048 s,较传统P&O算法微快,同样在t=0.5 s时,S=1 000 W/m2突变为S=400 W/m2,到新的稳态用时仅仅为0.040 s,明显速度快于传统P&O算法,且在稳态时功率波动较小,输出功率此时范围在80.02~79.38 W之间,震幅很小,震荡现象不明显,功率基本保持稳定状态。通过仿真结果可以看出,改进型P&O算法在跟踪速度和稳态精度两方面都优于传统算法,具有良好的动静态特性。
5 总结
本文提出改进型P&O控制策略,解决了稳态精度和动态特性不可同时兼顾的矛盾,具有快速应对外界环境变化的反应能力,且震荡较小,有利于提高能量利用率;Sinulink仿真验证了改进型算法的优点,在实际中易于实现,模型清晰简约,具有良好的推广应用前景。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
太阳能(2022年2期)2022-03-07
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
河北理科教学研究(2020年2期)2020-09-11
作文成功之路·小学版(2020年1期)2020-03-03
新校长(2018年7期)2018-07-23
电子制作(2017年20期)2017-04-26
轻兵器(2016年20期)2016-10-28
中国学术期刊文摘(2016年2期)2016-02-13
