双电机串联驱动PHEV能量管理策略研究
2021-03-29 09:39金士伟马超闫德超高洁
汽车实用技术 2021年5期
金士伟,马超,闫德超,高洁
(山东理工大学交通与车辆工程学院,山东 淄博 255000)
前言
随着全球能源短缺,环境污染问题愈加严重,新能源汽车的普及与推广便显得更为重要。插电式混合动力汽车作为由传统燃油车到纯电动汽车的过渡方案[1],在电池技术瓶颈尚未突破之前,相对纯电动汽车有着长续驶里程的优势;同时其与燃油车相比,节能效果又显著提高。因此,插电式混合动力汽车有着较好的研究意义。为了使插电式混合动力汽车充分发挥其特点和优势,其动力系统的构型[2-4]与能量管理策略[5-7]的研究便显得极为重要。本文提出一款以行星齿轮动力耦合机构为基础的双电机PHEV构型,该结构实现多种工作模式,避免了功率冗余现象,经济性提升显著。
1 整车构型与动力学特性分析
1.1 整车构型
本文所提插电式混合动力汽车构型,如图1所示。其构型主要由电机1、电机2、发动机以及行星齿轮机构组成。其中,电机1与行星齿轮机构太阳轮相连,电机2与齿圈相连。以电量消耗优先原则,在蓄电池电量充足时,实现了电机 1驱动,电机2驱动和双电机转速耦合驱动三种纯电动模式;在电量不足时,离合器处于分离状态,发动机带动ISG电机(启动发电一体机)实现行车发电,为车辆的行驶提供所需能量。
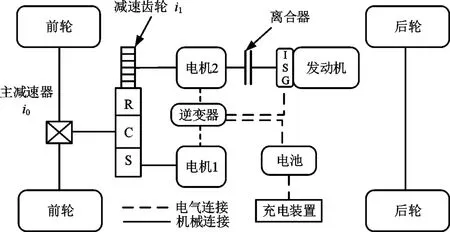
图1 整车构型图
1.2 动力学分析
利用杠杆分析法,系统各工作模式动力学特性分析如下。
纯电动模式:电机1单独驱动时,齿圈锁止,动力由太阳轮输入,行星架输出,式(1)-(2)所示;电机2单独驱动时,太阳轮锁止,动力由齿圈输入,行星架输出,式(3)-(4)所示;双电机转速耦合驱动时,电机 1,电机 2同时工作,电机1作用于太阳轮,电机2作用于齿圈,动力经耦合后,再由行星架输出,其动力学关系如式(5)-(6)。
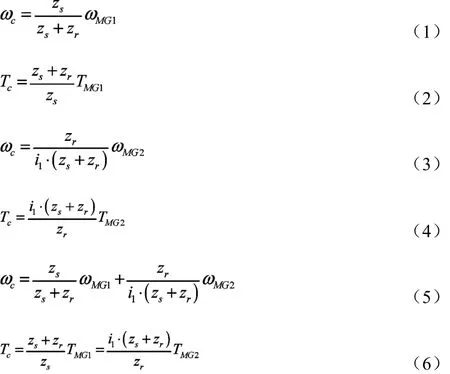
式中:T为扭矩;ω为转速;c为行星架;zr,zs分别为行星齿轮齿圈与太阳轮齿数;i1为电机2到齿圈的减速比。
混动模式(串联模式):当动力电池电量不足时,驱动车辆动力仍由电机1与电机2提供,其动力学关系如上式(1)-(6),此时 ISG电机启动发动机,发动机带动 ISG电机发电,给蓄电池补充能量,实现串联驱动。与纯电动模式类似,串联驱动模式同样有电机1与发动机组合,电机2与发动机组合驱动,双电机转速耦合下的串联驱动三种模式,其中发动机与ISG电机转速转矩关系如下。

式中:isg为 ISG电机;eng为发动机;iisg为发动机到ISG电机的减速比。
再生制动模式:制动时,以上电机根据对应工作模式,分别工作于发电状态,将减速过程中的能量储存在蓄电池当中;当需求制动力较高时,采用机械制动与再生制动相结合的联合制动方式。
2 控制策略搭建
2.1 整车参数选取
本文着重于动力学特性以及控制策略的分析,鉴于参数匹配方面已有较多详细的研究,不再赘述。根据整车动力性经济性指标选取整车参数如表1所示。

表1 整车参数表
2.2 整车控制策略
基于双电机串联驱动构型的多种工作模式:纯电动模式(电机1,电机2,以及双电机转速耦合),串联驱动(电机1,电机2,以及双电机转速耦合)以及再生制动等工作模式。建立基于规则的逻辑门限值能量管理策略如下。
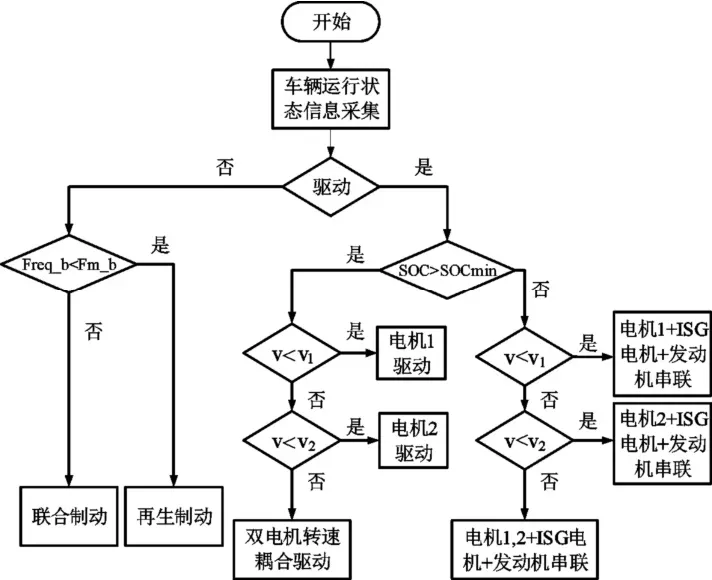
图2 整车控制策略流程图
如上图2所示,当车辆不处于驱动状况下,检测需求制动力Freq_b是否小于电机制动力Fm_b,当电机制动力能满足需求制动力时,采用再生制定模式;否则,采用联合制动模式。SOCmin为电池电量最低值,当低于0.3时,此时该车辆由纯电动模式转变为串联驱动模式,v1,v2为两个速度切换阈值。
3 仿真结果与分析
在整车参数与控制策略确定后,基于MATLABSimulinkStateflow平台搭建整车模型与控制策略,将选取数据输入模型,运行模型。
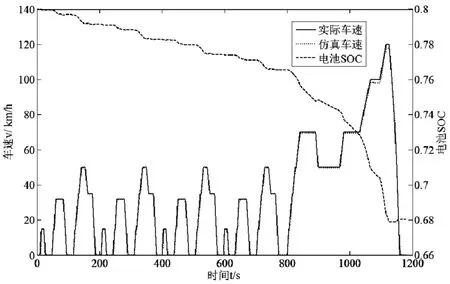
图3 车速跟随与电池SOC状况图
设置电池初始SOC为0.8,此时电量较高为纯电动驱动,在NEDC工况下,其仿真车速与电池SOC状态如图3,电机扭矩状态如图4。
在图3中,车速跟随状态较好,电池SOC总体呈下降趋势。工况车速减速时,电池SOC略有上升,制动能量回收有效;车速较高时,车辆需求功率变大,电量损耗较多,电池SOC下降较快。如图4所示,电机扭矩随车速变化呈交替作用,当车速较高时,双电机同时工作,为车辆提供所需动力,间接证明了模型与能量管理策略的正确性。
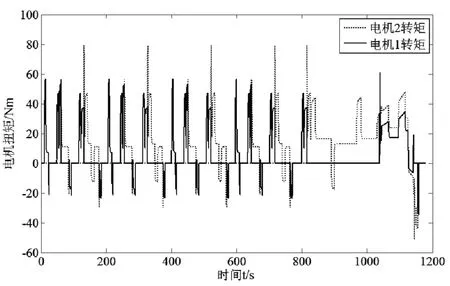
图4 电机转矩图
4 结论
该构型避免了传统单电机混合动力汽车模式单一,效率低下问题。提出双电机构型,并且采用大小不同两个电机,使该构型车辆在面对不同工况下,尽可能高效运行,减少了功率冗余。基于 MATLABSimulink建立基于规则的能量管理策略,实现了合理的模式转换,能有效提升整车经济性,具有较好的研究意义。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
少男少女·教育管理(2022年3期)2022-05-12
航空动力(2022年2期)2022-05-06
新民周刊(2022年9期)2022-03-25
安徽工业大学学报(自然科学版)(2021年3期)2021-09-08
中学课程辅导·高考版(2020年9期)2020-10-20
作文周刊·小学一年级版(2016年11期)2016-05-10