基于仿生学的草坪落叶清理装置的设计与试制
2021-03-25 10:04祝志芳郭小龙熊高翔曾宇露
南昌工程学院学报 2021年1期
祝志芳,郭小龙,熊高翔,曾宇露,王 欢
(1.南昌工程学院 机械与电气工程学院,江西 南昌330099;2.浙江理工大学 机械与自动控制学院,浙江 杭州 310018;3.广西大学 机械工程学院,广西 南宁 530004)
随着我国经济的快速发展和社会进步,人们对生活环境质量要求逐步提高,城市绿化工程与人们的生活联系紧密,城市机械化清扫作业势在必行。草坪在城市绿化中起到了重要的作用[1],其绿化面积日益增大,随之而来的草坪落叶垃圾成为了影响草坪美观和环境的重要问题。现有的清扫车大都适用于道路清扫[2,3],但体积大、笨重,对草坪有一定损害,不适用于草坪落叶垃圾清理。目前的清理方式主要有两种:一种是人工清理,通过草坪耙等工具把落叶垃圾耙集后用手装进垃圾袋,劳动强度和工作量较大,且工作繁琐;另一种是借助清理机械,市场上的清理设备有燃油手推吸树叶机,采用的动力源为汽油发动机,有噪音影响,移动不灵活,车轮的碾压会对草坪上的植被造成破坏。
1 仿生学原理
仿生学是复制自然和从自然获得想法,具有相似性、多样性、创新性等特征[4]。仿生学的研究内容主要有形态仿生、结构仿生、功能仿生及材料仿生[5]。仿生六足因其步态丰富和结构冗余在多领域具有良好的应用前景[6-7]。
考虑到清理草坪时应尽量减小对草坪的破坏,装置的行走方式尤为重要。自然界中的生物在长期进化下对自然环境已经有了高度的适应性,是仿生设计的源泉。多足昆虫的躯体结构能很好地在各种复杂地形上行走,仿多足昆虫的腿部结构设计装置的行走机构既能减小对草坪的破坏又能灵活敏捷地移动。基于运动机理仿生,分析多足昆虫的腿部结构与功能,设计仿生六足行走机构。仿生六足的腿部机构采用闭链的连杆机构,用两副连杆机构连接中间足,两副连杆机构连接前足与后足,一侧的行走结构如图1所示。根据多足昆虫腿的位置,行走部分构型采用正向对称分布,六足对称均匀分布机体两侧,如图2所示。

图1 行走机构 图2 对称分布的仿生六足
工作时把六条足分为两组,以一侧的前足与后足和另一侧的中足为一组,组成一个三角形支撑体,是典型的三角步态[8],稳定性较强,六足直行步态如图3所示。起初如图3(a)所示,六足处于支撑状态,图3(b)中,2,4,6足摆动向前跨步,1,3,5足呈支撑态,此时装置向前移动一个半步长,图3(c)中1,3,5足摆动向前跨步,2,4,6足复位,再移动一个半步长,图3(d)中六足复位。

图3 仿生六足行走步态
2 装置总体设计
2.1 结构设计
草坪落叶垃圾清理装置的结构设计如图4所示,主要包括六足行走部分、传动部分和收集部分。六足行走部分一侧是由四个曲柄摇杆机构利用其端点运行轨迹连接三足,曲柄通过轴与链轮相连,采用链传动方式驱动,两侧各有一电机通过联轴器与链轮连接。收集部分包括风机和收集箱,采用气吸式收集落叶垃圾,通过风机的运转使装置内外形成负压,落叶垃圾通过收集口进入收集箱。两侧电机同步转动,带动仿生六足行走机构平稳向前移动,完成草坪落叶垃圾的清理工作。
2.2 控制系统设计
草坪落叶清理装置的控制系统选用Arduino UNO单片机为核心,L298N作为两电机的驱动模块,通过控制电机实现仿生六足机构的前进、后退与转弯,通过控制风机使装置箱体内外形成压差完成草坪落叶垃圾的清理。
Arduino UNO是一款基于ATmega328芯片的开源控制板,有14个数字I/O引脚(其中6个可作为PWM输出)及6个模拟输入引脚,控制程序可以通过Arduino IDE进行烧录,能完装置的控制要求。L298N是一种双H桥电机驱动芯片,抗干扰能力强,具有PWM调速,可用来控制装置的两个电机。图5为装置的控制系统硬件图。
在进行清理工作时,Arduino单片机控制风机一直工作,通过控制引脚的高低电平实现电机的正反转,从而使草坪落叶清理装置前进与后退,完成清理作业。通过可调PWM波的引脚来控制两电机的转速,利用两电机的差速实现装置的转弯。电机的部分控制程序如下:

图4 草坪落叶垃圾清理装置结构图
定义各引脚:
int IN1=3;//定义pin 3向IN1输出
int IN2=4;//定义pin 4向IN2输出
int IN3=5;//定义pin 5向IN3输出
int IN4=6;//定义pin 6向IN4输出
int ENA=9;//定义pin 9向ENA使能端输出
int ENB=10;//定义pin10向ENB使能端输出
初始化各引脚为输出模式:
void setup()
{
pinMode(IN1,OUTPUT);

图5 控制系统硬件图
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
}
装置前进程序:
void loop()
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,200);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
analogWrite(ENB,200);
}
通过L289N电机驱动上的使能引脚接到Arduino UNO具有PWM波调制的9,10输出引脚中,其可调占空比范围是0~255。
装置转弯程序:
void loop()
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,150);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
analogWrite(ENB,250);
}
3 曲柄摇杆机构的设计与仿真分析
3.1 曲柄摇杆机构的设计计算
草坪落叶垃圾清理装置是采用仿生六足行走机构,其关键的组成部分是其连杆曲线具有一段近似对称直线的曲柄摇杆机构[9-10],它的设计计算如下:
在曲柄摇杆机构ABCDM中,当杆长条件满足b=c=e时,M点的运动轨迹能产生对称的连杆曲线,并且连杆曲线上的对称轴一定过机架上的D点,同时与机架垂直。当铰链B点运动到切点B′,B″时,对应的M点运动到M′,M″。
设b=c=e=ma,d=na(m、n>1),当m,n满足方程
(1)
得到的曲柄摇杆机构:当曲柄AB与机架AD共线时,M点运动至位于连杆曲线直线段的中点(见图6)。
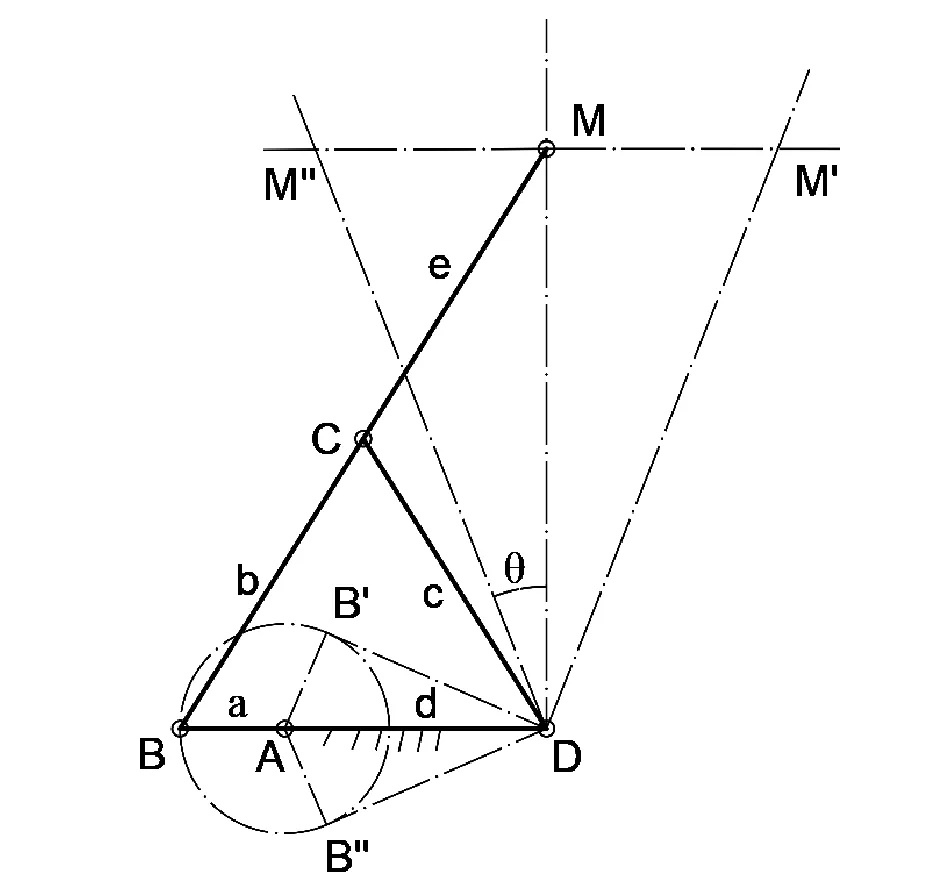
图6 具有直线运动轨迹的曲柄摇杆机构
该曲柄摇杆机构连杆的延长杆的端点的运动轨迹有较长的直线段,并且连杆曲线的直线部分平行机架AD。取n>1时,机构的曲柄AB存在。
连杆曲线中直线段到机架AD的距离:
(MD)2=(2ma)2-[(n+1)a]2
(2)
曲柄AB轨迹圆视角的半角:
θ=arcsin(a/d)
(3)
连杆曲线直线段的长度略小于2(MD)tanθ。
取n=2.5,当a=40mm时,d=100mm,b=c=e=131mm,计算出直线段的长度约为177mm。
3.2 具有直线运动轨迹的曲柄摇杆机构特性分析
如图7所示的曲柄摇杆机构,曲柄AB为原动件,在其旋转一周的过程中,连杆BC两次与其共线,此时摇杆CD刚好处于两个极限位置C1D和C2D,而原动件曲柄AB1与AB2所夹的锐角θ即为极位夹角。
当曲柄AB以角速度ω逆时针转过α2+180°+θ时,摇杆CD将由C1D位置摆到C2D位置;当曲柄AB继续转过α1=180°-θ时,摇杆又从C2D位置回到了C1D位置,两次的摆角都相同,为φ。在曲柄为等角速度转动的情况下,连杆两次与曲柄共线时所转过的角度不同,那么所用的时间也不同,来回的线速度也就不同。因此,此曲柄摇杆机构具有急回运动特性,行程速度变化系数:
K=(180°+θ)/(180°-θ).
(4)
由曲柄摇杆机构组成的仿生六足行走机构同样具有急回运动特性,提高了草坪落叶清理装置的清理效率。
3.3 曲柄摇杆机构的仿真分析
完成曲柄摇杆机构的尺寸计算后,为了验证其是否能满足行走要求,因此应用ADAMS软件对其做运动分析,主要是跟踪连杆端点的运动轨迹,并分析速度、加速度变化[11-12]。
按设计计算的尺寸应用Solidworks软件完成三维建模后,导入ADAMS软件环境中,创建固定副,将机架固定在地面上,对曲柄摇杆机构各杆件连接处添加转动副,在曲柄的转动副处添加旋转驱动,参数设为10d*time,进行交互仿真。跟踪连杆端点的运动轨迹,如图8所示,是一条对称的连杆曲线,且有一段轨迹为直线。

图7 曲柄摇杆机构急回特性分析图 图8 连杆端点运动曲线
进入ADAMS的后处理模块,测量连杆端点Y方向的速度、加速度曲线如图9~10所示。

图9 连杆端点Y方向的速度曲线

图10 连杆端点Y方向的加速度曲线
由图9~10的曲线分析可知,在近似直线段运动时,连杆端点处的速度、加速度波动很小,同时在曲线段运动时速度、加速度都发生变化,说明此曲柄摇杆机构具有急回运动特性,工作行程时慢速前进,移动平稳,回程时快速返回,大大提高了清理草坪落叶垃圾的效率,设计满足了行走要求。
4 样机试验研究
在完成装置的结构设计与分析后,进行模型物理样机的试制。选用2mm的亚克力板制作整个装置的外箱体及其行走机构。相关参数见表1,模型样机实物如图11所示。

表1 模型样机参数表

图11 样机实物图
用碎纸屑模拟落叶垃圾进行试验,经过试验测试该装置可以很好的完成清理工作,在清理过程中对草坪的破坏较小,工作高效,满足性能要求,实现了预期目标,具有很强的实用价值。
5 结论
创新设计了一种草坪落叶清理装置,外形轻巧,移动灵活,在清理时不会对草坪造成破坏,实现了草坪清理的机械化作业,提高了清理效率。
猜你喜欢
南方农机(2021年3期)2021-02-07
语数外学习·高中版中旬(2020年8期)2020-09-10
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
中学生数理化·教与学(2019年8期)2019-09-18
数码世界(2017年12期)2017-12-28
新商务周刊(2017年5期)2017-10-16
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
中国自行车·骑行风尚(2014年2期)2014-05-07
汽车与新动力(2013年6期)2013-03-11