
工业机器人超声波传感器避障算法设计与优化研究
2021-03-22 16:36孙涛
电脑知识与技术 2021年4期
关键词:工业机器人
孙涛


摘要:超声波传感器具有成本低、精度高、运算快、避障算法设计简单的特点,在工业机器人避障、路径规划领域表现出良好的前景。文章以超声波避障算法为基本原理,探讨其在工业机器人领域的应用价值、算法设计及优化方向,以便于改善现有技术在避障设计中的缺点,使工业机器人更好地服务于工業企业的生产需要。
关键词:工业机器人;超声波传感器;避障算法
中图分类号: TP311 文献标识码:A
文章编号:1009-3044(2021)04-0175-02
工业机器人发展至今已有近70年的历史,在其搭载人工智能、计算机技术的背景下,其智能性、易用性的优势凸显,而自主发展、人机协作正成为工业机器人领域的发展趋势之一[1-2]。随着物流、电子、工业生产领域的技术革新、新旧动能转换,在工业机器人移动时实现高效、高精度的避障,是工业机器人行业转型升级、产业化应用的关键,其避障性能也是衡量工业机器人实用性的指标[3]。目前以模糊逻辑控制、人工势场法为代表的避障算法,在工业机器人运行中扮演者至关重要的角色,但该类技术仅适用于简单环境下的避障,对于多障碍环境、复杂工况的避障效果欠佳,存在中途停顿、摆动等问题通病。与之相比,超声波传感器方法在避障中,能够为机器人提供开阔的视野、障碍物信息,给工业机器人避障策略的设计提供了新的研究思路和方向。
1 超声波传感器避障的原理
超声波传感器由压电晶片组成,是基于超声波波长短、频率高、传播定向、绕射频率低的特性设计的传感器,因具有较大的机电耦合系数,输出能量大,工作中有着较高的灵敏度,可以适合高负荷条件下的传感器运行需要。纵向振荡为基础的超声波技术应用,能够在固体、液体、气体不同环境中传播,传播效率也存在明显的差异,但无论是在液体、固体中的高频率传输,还是在空气中的低频率传输,都伴随着衰减现象,针对超声波的这一特性,在工业机器人行进过程中,可以运用超声波测距模块,实时测量其和障碍物间的距离,在设定的安全范围内,机器人可以自动进行障碍物的规避[4]。该避障方法是在时间差测距法的基础上经演化、实践形成的,即按照空气中超声波在单位时间内的移动时间、距离,测算超声波在空气中从发射器发出信号,至接收器收到回波的距离,运算公式为:
S=Tυ
在表达式中:
S代表超声波在空气中的移动路程;T代表超声波在移动时所耗费的时间;υ代表空气中超声波在单位时间内的移动距离。
超声波传感器在工业机器人行走中的障碍物检测方式为持续探测,参照常见的超声波传感器模块,检测误差一般在4%内,因此利用超声波传感器避障,可以获得良好的避障效果。
2 工业机器人超声波传感器避障算法与流程设计
基于超声波传感器避障的原理,在工业机器人避障设计中,以声速、时间、障碍物距离的关系为基础,三者的表达式可表示如下[5]:
S=1/2ct
在上述表达式中,C代表声速;
S表示工业机器人和障碍物之间的距离;T表示发射脉冲时刻与首个回波达到时刻的时间差。
依据上述避障公式、超声波测距原理,采用MATLAB平台中的Line函数,FIS模糊推理系统编辑器,整合工业机器人障碍物信息获取、检测、处理、模糊推理过程,建立简易的模型,减少建模过程对机器人自身力学模型的依赖性。借助模糊推理、控制,加强避障算法在应用中的精度,便于进行机器人左、右、前方各个方位障碍物的识别与控制。以设计的超声波避障算法为例,确定了工业机器人的主要运行流程:
图1流程图中,工业机器人工作时,首先,依据工业生产、机器人的功能定位需求,进行参数初始化设置,调试机器人的避障参数,使工业机器人在安全距离内及时选择无障碍路线。之后,利用超声波传感器,采集机器人周边的声波信号,检测工业机器人和障碍物间的距离,联合模糊推理方法,对障碍物进行预判,按照机器人所处位置,推荐可靠的行进路线,生成探测结果,再将数据传输至工业机器人配置的显示屏,可显示不同方位的障碍物信息、距离检测结果。接着,在遭遇障碍物的条件下,机器人可以避开障碍,旋转90°继续选择安全的行程。若机器人判断预定的行走路线无障碍物时,可以直接选择对应方位的路线,完成规定的任务。
3 工业机器人超声波传感器避障算法优化策略
考虑到基础的超声波传感器算法在短距离内测距精度缺陷问题,通过延迟电路时间,来控制避障过程中的超声波测距精度,优化后的避障算法表达式为:
△t=s1t1-s2t2/s2-s1
上述表达式中:
s1、s2表示已知测量距离;△t表示延迟时间;t1、t2表示对应的测量时间。
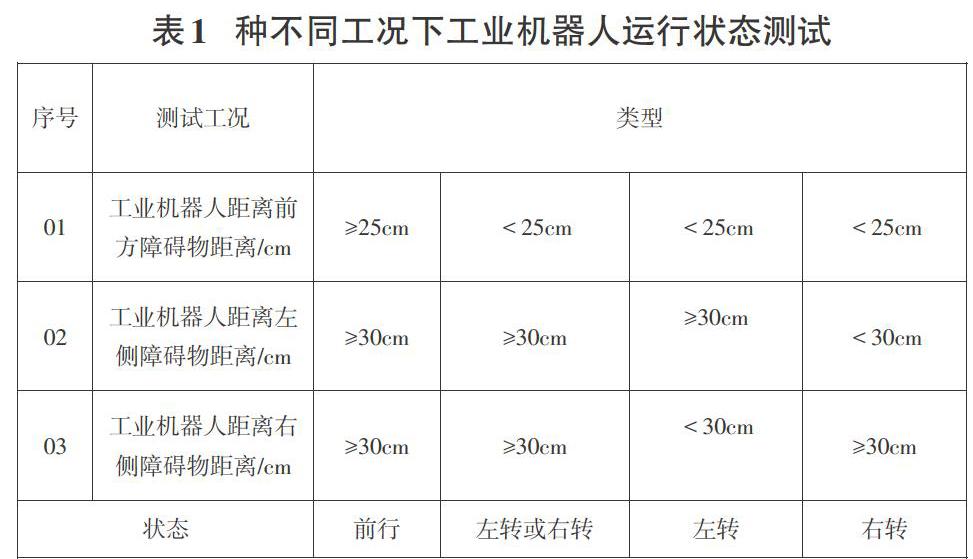
根据优化后的超声波避障算法,对工业机器人和障碍物间的距离参数进行分析和设定,共计包含前方障碍物、左侧障碍物、右侧障碍物3个指标[16]。采用超声波传感器探测各部位信息,要求工业机器人前方行走时,当障碍物距离工业机器人的距离≥25cm,则视为安全路线,机器人可继续行走。随着与障碍物距离的拉进,当障碍物距离<25cm时,探测工业机器人左侧、右侧的障碍物信息,当识别到左侧、右侧的距离到机器人均≥30cm时,可以向左侧或者右侧旋转90°后行进。若探测到左右两侧的安全距离均<25cm时,工业机器人可后退一段距离,当有一侧的距离≥25cm,则可向该方向行走,直到选择最佳的无障碍路线为止。
4 超声波传感器避障算法验证
为验证超声波传感器避障算法的精度与可靠性,采用XX公司生产的AIR3工业机器人和XX公司生产的200F18TR-2超声波传感器为试验工具。其中,工业机器人为6轴,最大运动范围560mm,定位精度±0.02mm,6个轴的运动范围分别为:-170°/+170°、-110°/+120°、-110°/+155°、-200°/+200°、-120°/+120°、-350°/+350°,6个轴的运动速度分别为450°/s、450°/s、540°/s、800°/s、800°/s、800°/s。超声波传感器的标称频率为200.0±10%KHz,测量范围为0.07-0.8M,标准检测板为100x100mm,输出方式为NPN/PNP/0-10V/4-20mA。以工业机器人现行的工作速度为依据,使其向障碍物方向行进,测量工业机器人和障碍物间的最小距离,分别在前方障碍物、左侧障碍物、右侧障碍物3种不同的工况条件下,测试工业机器人的运行状态:
经过不同工况下的工业机器人运行状态测试,发现超声波传感器避障算法在避障中,对于工业机器人的运行环境有固定要求,機器人行走过程需保证路面平整、光滑,无坑槽、凹凸不平现象,方可按照设定的参数进行避障处理,一旦路面出现坑槽,则会影响超声波传感器的测量精度,机器人的行走也可能存在一定的概率偏离原有的路线。另外,超声波传感器量程内对稍远距离的障碍物,有着较好的测量效果,而对于近距离的障碍物可能存在检测盲区,但得益于测试中模糊推理策略的应用,可以增强超声波传感器识别障碍物的能力,提升其应对障碍物的反应能力,减少了探测误差,这也有效指导了工业机器人的正常运行,但模糊推理策略对于近距离的超声波传感器探测精度有限。
5 结语
文章运用超声波传感器设计了工业机器人避障算法,建立了工业机器人避障流程,确定了障碍物到工业机器人间的安全距离控制阀值,测距的灵敏度、精度高,可以适用于一般环境下的工业机器人简单作业,对于复杂工况,尤其是动态障碍物的避障处理及近距离的避障设计,超声波传感器避障算法还存在着本身的劣势,将超声波避障算法与遗传算法、人工智能技术等结合进行算法优化,是工业机器人超声波避障未来一项重要的命题。
参考文献:
[1] Takei Y,Matsui R,Minh-Dung N,et al.Velocity measurement using MEMS ultrasonic sensor for non-invasive blood pressure measurement[J].IEEJ Transactions on Sensors and Micromachines, 2018,138(2):54-58.
[2] AlMohimeed I,Ono Y.Ultrasound measurement of skeletal muscle contractile parameters using flexible and wearable single-element ultrasonic sensor[J].Sensors, 2020,20(13):3616.
[3] 华丹.基于区块链技术的工业机器人视觉检测及避障系统设计[J].计算机测量与控制,2020,28(7):69-73.
[4] 于燕.智能机器人的超声波避障技术研发及应用[J].南方农机,2019,50(21):263.
[5] 吴翩卉,卢杜晓,罗忠辉,等.智能机器人的超声波避障技术研发及应用[J].机床与液压,2019,47(9):46-50,57.
【通联编辑:李雅琪】
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
