无人机在崩塌地质灾害调查中的应用*
2021-03-20 08:10:40胡家梁常海明
工程技术研究 2021年1期
胡家梁,常海明
1.中铁第五勘察设计院集团有限公司,北京 102600
2.东平县自然资源和规划局,山东 泰安 271500
传统的地质灾害体调查主要采用RTK、全站仪等。李玉立等[1]利用北斗RTK 成功地获取露天矿区崩塌灾害体信息。程明飞[2]等阐述了全站仪等传统测量设备在崩塌灾害调查中的应用。传统调查手段受人为因素限制较大,难以到达崩塌等地质灾害点及周边开展调查工作,因此传统调查存在地质灾害点标注精度不高等问题[3]。随着无人机航摄技术的不断进步,开始将无人机应用于地质灾害体的调查,该技术避免了工作人员靠近灾害体引发危险。
1 研究区概况与数据获取方法
1.1 研究区概况
研究区为开采灰岩所形成的采石场,目前已关闭,但未对采石场进行治理,各采坑岩石裸露,形成采坑高陡裸露岩边坡,坡度62.7°~85°的直立岩面。由于岩体节理裂隙发育,属于中等风化-强风化,岩面有采矿遗留废渣块,坡顶隐约可见第四系地层,暴雨时存在崩滑隐患。
1.2 数据获取
此次调查采用大疆精灵4RTK 四旋翼无人机,该款无人机具备5 项摄影功能,可用于倾斜摄影,无人机重1.41kg,单块电池续航30min,最大飞行速度为50km/h,无人机搭载2000 万像素云台相机,相片最大分辨率为5472×3648。
经现场勘查确定航拍重叠度(航向80%、旁向60%),航测范围1km2,调查时间是2019 年9 月15 日12 点,当天调查区内晴朗无风,太阳高度角约40°,阴影倍数小于2,主航线10 条,适宜航测。设定航线为东西走向,相对航高80m,分辨率为5.0m/pix,飞行速度为10m/s。此次航测共出动7 个架次,耗时2.5h,拍摄照片1682 张。研究技术路线见图1。此次研究共均匀布设15 个控制点(见图2)。其中,像控点10 个、检核点5 个,控制点中心砸入钢钉,周边喷涂红色油漆,即十字叉(长1m),十字叉中点即为像控点。控制点坐标使用GPS-RTK 采集,定位时对每个控制点做10次平滑,取平均值,作为控制点坐标。
1.3 数据处理
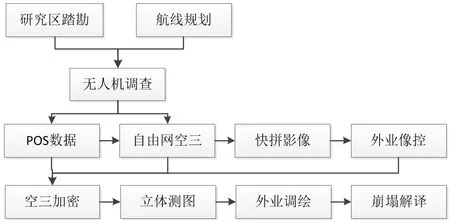
图1 无人机崩塌地质灾害调查技术路线
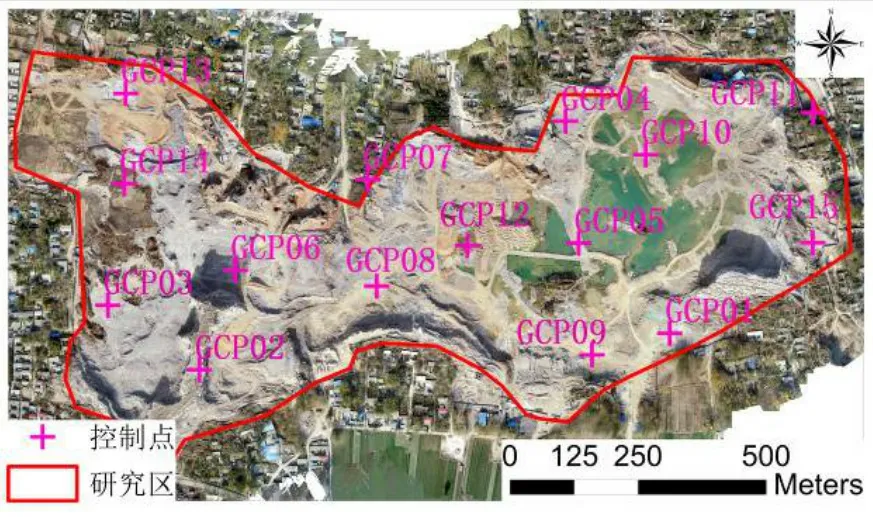
图2 研究区像控点分布图
此次研究采用大疆精灵4RTK 无人机,该款无人机在出厂时已测得相机内方位元素,不需要再做相机检校,此次调查数据处理采用Pix4Dmapper。数据处理过程如下:(1)在每一幅相片中提取特征点,经特征匹配算法计算出同名点,用于相对定向。(2)经相对定向以后,做区域网平差,平差主要内容包括相机参数、POS 数据等。(3)运用Pix4Dmapper,通过前方交会算法得出每个像点的地理坐标,进而完成相片空三加密处理,研究区局部点见图3。(4)通过点云生成DSM[4]。
研究区内没有建筑物分布,植被覆盖率低,仅在研究区边界附近有低矮灌木及杂草分布,不需要滤波处理,因此经数据处理后得到的DSM 即可看作DEM。
2 数据结果
2.1 检核点误差
将RTK 测量得到的检核点坐标值作为其真值,对得到的数据进行精度分析,平面及高程精度分析结果见表1。
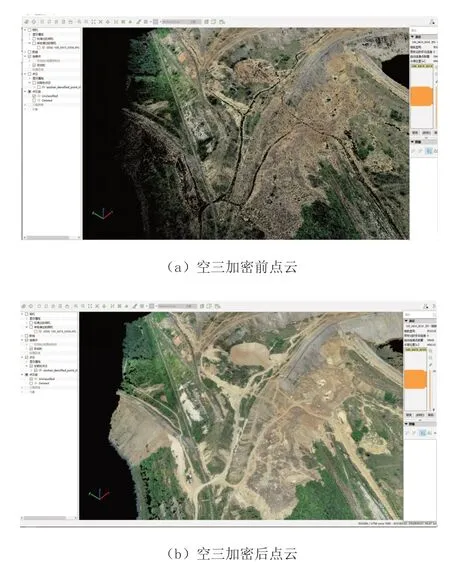
图3 研究区局部点云图
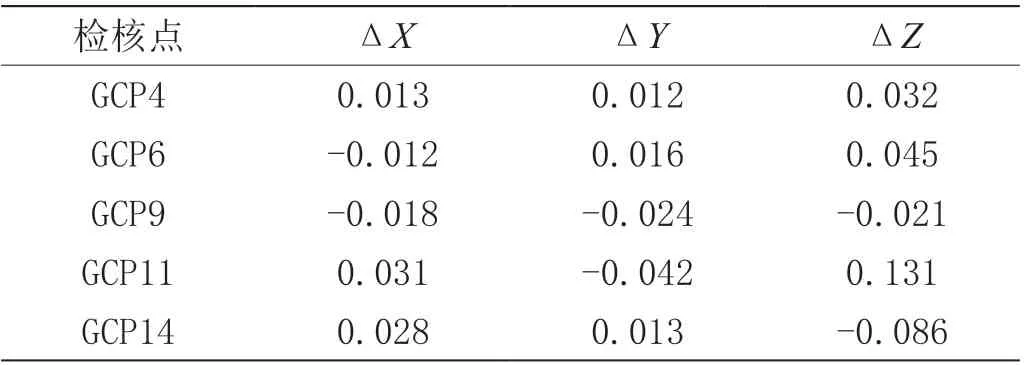
表1 平面及高程精度对比结果 单位:m
经分析此次调查,平面最大的误差ΔX 为0.020m,ΔY 为0.021m,ΔX 的平均误差为0.011,ΔY 的平均误差为0.010,最大误差点为GCP11。高程最大误差ΔZ为0.131m,ΔZ的平均误差为0.063m,平面及高程检核结果均符合规范。
2.2 崩塌灾害体信息获取
利用搭载RTK 功能的无人机快速获取研究区的DEM与DOM,除了能获取崩塌体的准确坐标,还可以在Pix4D mapper 软件中测量崩塌体几何参数、坐标高程、结构面特征等[5]。通过无人机调查结合现场调查,研究区共有6 个崩塌体,经调查各崩塌体参数,见表2。崩塌体W1、W2 照片及三维模型见图4、图5。

表2 崩塌体参数统计

图4 崩塌点照片
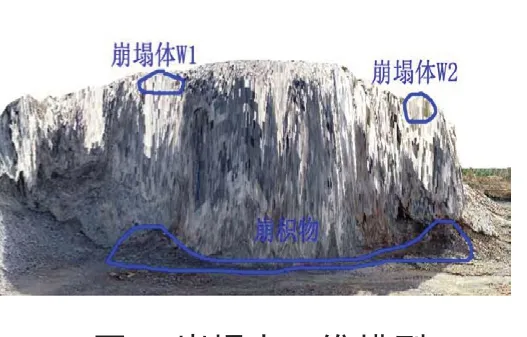
图5 崩塌点三维模型
3 结论
文章研究了无人机倾斜摄影技术在崩塌地质灾害调查中的应用,通过倾斜摄影获取高分辨率的三维模型,在计算机中呈现了崩塌体的真实场景,为类似崩塌等地质灾害的研究提供了新的思路及方法。(1)建立崩塌灾害体三维模型够能使崩塌体灾害信息的表达更为直观,有利于未到过现场的专家参与崩塌等地质灾害治理的会商决策。(2)倾斜摄影技术可以快速、准确地获取崩塌灾害体的坐标、高程、结构面特征等,为灾害体稳定性计算提供参数,进而为崩塌灾害防治提供技术支撑。(3)倾斜摄影技术具有精度高、成本低、速度快、效率高的特点,在保障人员安全的前提下,能够有效地提高崩塌等地质灾害调查的效率。
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
心理学报(2022年4期)2022-04-12 07:38:02
水泵技术(2021年3期)2021-08-14 02:09:20
装饰装修天地(2020年7期)2020-06-01 18:43:59
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
中国工程咨询(2017年12期)2017-01-31 02:56:54
工业设计(2016年7期)2016-05-04 04:01:15
安徽地质(2016年4期)2016-02-27 06:18:21
新校长(2016年8期)2016-01-10 06:43:49
中国惯性技术学报(2015年1期)2015-12-19 13:12:17