
基于高分二号的城市黑臭水体动态监测
2021-03-19 00:27胡国庆陈冬花刘聪芳谢以梅刘赛赛李虎
自然资源遥感 2021年1期
胡国庆,陈冬花,,刘聪芳,谢以梅,刘赛赛,李虎
(1.安徽师范大学地理与旅游学院,芜湖 241000; 2.滁州学院计算机与信息工程学院,滁州 239000; 3.新疆师范大学地理科学与旅游学院,乌鲁木齐 830001)
0 引言
随着城市化的进程不断加快,居民人数的迅速增加,大量的工业废水、生活污水等排入城市河道,导致水体黑臭现象频发,不仅对城市生态环境造成恶劣影响,还影响着市容市貌以及居民的身体健康。2015年4月2日国务院颁发的《水污染防治行动计划》(“水十条”)[1]明确提出,到2020年,地级及以上城市建成区黑臭水体均控制在10%以内,到2030年,城市建成区黑臭水体总体得到消除。卫星遥感技术具有的效率高、成本低、可长时间周期监测等优势,为环境保护[2]和黑臭水体的动态监测提供了新思路和解决方案。需要注意的是,利用遥感手段监测水体时,只能依靠光学信号监测水体的“黑”而无法监测水体的“臭”,对于只发出臭味而颜色正常的水体,光学遥感手段是无法监测到的,而大多情况下,水体受到污染时,常常同时出现刺鼻气味以及颜色异常等现象,因此,以下统称为黑臭水体的遥感监测。
早期的黑臭水体遥感识别研究集中在对类似的“黑水现象”或“黑水团”的研究,Nichol[3]运用Landsat TM影像成功识别了新加坡一个河口的黑水区域; Zhao等[4]利用MODIS和SeaWiFS数据,基于443 nm的离水辐射率和CDOM吸收系数提取了2002年和2012年2年的佛罗里达礁群黑水。随着国内外学者对水体光学特性和水质分析的研究不断深入,涌现了各种遥感识别算法,靳海霞等[5]利用高分二号(GF-2)卫星融合影像对北京市城镇水体进行水体岸线提取和水质参数反演,利用水质参数浓度构建综合营养状态指数来判定河流黑臭情况; 温爽等[6-7]根据黑臭水体光学特性提出了波段比值法,并验证了其在南京市黑臭水体识别中的可靠性; 姚月等[8-9]提出用瑞利散射校正反射率代替遥感反射率,在波段比值法的基础上提出了一种改进后的归一化比值模型(black and odorous water index,BOI); 七珂珂等[10-11]提出了一种城市黑臭水体遥感分级指数(black and odorous water classification index,BOCI),用于重度黑臭水体与轻度黑臭水体的分级识别,并在此基础上得到了2015—2018年沈阳市黑臭水体动态变化过程。
以上学者的研究表明目前城市黑臭水体的遥感识别尚处于算法初探阶段,并且集中在对城市主要干流黑臭水体的提取,而对黑臭现象经常出现的细小河道沟渠的研究较少,不可避免出现漏判现象。此外,大多学者利用单一算法监测黑臭水体动态变化,由于容易受到影像质量、拍摄时间等因素干扰,无法验证其在历史影像中的精度,在实际应用中可靠性较低。
针对当前黑臭水体遥感识别及其动态监测中的不足之处,本文结合黑臭水体的光学特征和表观特征,利用GF-2卫星的高空间分辨率特性,使得提取城市细小河道、黑臭水体的目视解译更为准确,并以长江流域芜湖段鸠江区为研究区,根据2016年2月5日政府公布的《全国地级及以上城市黑臭水体名单》[12](以下简称《名单》),获取同时期GF-2影像,针对单波段阈值法、波段差值法、归一化指数法和斜率指数法进行阈值修正和精度评价得到最优算法,并在此基础上利用2014—2020年GF-2影像,综合利用目视解译标志得到黑臭水体的分布及变化,探索基于光谱特征和表观特征相结合的识别方法用于长时间黑臭水体动态监测的可靠性。
1 研究区概况与数据源
1.1 研究区概况
研究区位于安徽省东南部的芜湖市,地理坐标介于E117°40′~118°44′,N30°19′~31°34′之间,流经芜湖市的河流及芜湖市境内河流,包括青弋江、漳河、水阳江、裕溪河和扁担河等,以长江芜湖段为主干构成了一个较为完整的水系。芜湖市下辖鸠江区跨长江两岸,水系发达、湖塘密布,经济发展迅速。根据《名单》和《安徽省水污染防治工作方案》[13]公布的黑臭水体清单,芜湖市黑臭河段79条,其中鸠江区有弋江站主沟,上、下新塘水系,火石埂东和西沟等25条黑臭河段,占全市的31.6%,是黑臭水体分布的典型区域。
1.2 高分影像数据及预处理
GF-2卫星[14]是我国自主研制的首颗亚米级民用光学卫星,回归周期69 d,搭载2台PMS(全色/多光谱),左右相机幅宽为45 km,侧摆能力±35°,可获取的波谱范围如表1所示。
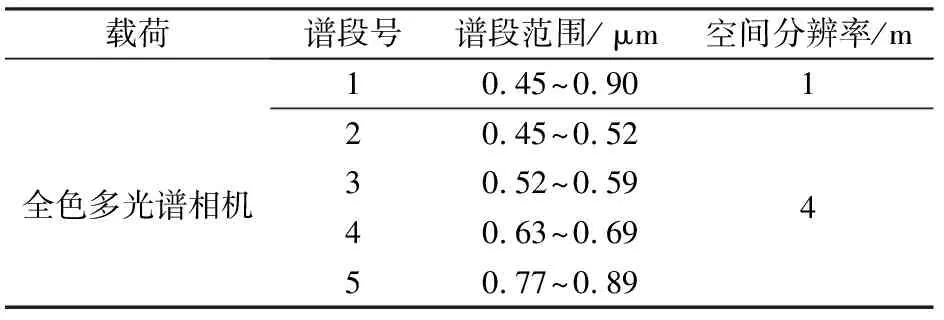
表1 GF-2 载荷参数Tab.1 GF-2 load parameters
获取2景2016年3月2日GF-2影像,用于算法阈值修正和精度评价; 获取2014年12月14日、2016年11月3日、2018年1月1日、2020年3月19日各1景,用于鸠江区主城区黑臭水体动态监测,影像质量较好。基于ENVI5.3软件平台完成影像数据的预处理工作,主要包括正射校正、辐射定标、大气校正、影像融合、影像镶嵌等。首先,利用天地图无偏移影像,对全色和多光谱影像分别添加控制点进行正射校正; 之后进行辐射定标和大气校正,大气校正采用ENVI软件自带的FLAASH大气校正模块; 然后,利用校正后的GF-2影像4 m多光谱和1 m全色数据,采用NNDiffuse Pan Sharpening方法进行融合,融合后的影像空间分辨率为1 m,既具有多光谱特征,又有较高的空间分辨率,如图1所示。并且校正后的影像可以真实反映地物信息及水体遥感反射率信息。采用归一化水体指数(normalized difference water index,NDWI)提取水体,掩模得到水体分布,并剔除混合像元,对主要的细小河流进行补全。

1.3 黑臭水体目视解译标志
在GF-2影像上黑臭水体的表观特征与一般水体有明显差别(图2),根据前人研究[15],利用以下黑臭水体的目视解译标志作为辅助判别手段可以有效提高其遥感识别的精度。


(e) 垃圾堆放(大阳垾湿地公园水系)
1)水体颜色。由于生活污水、工业废水的大量排放,城市河道有机物增多,导致水中耗氧速率大于复氧速率,造成缺氧环境,厌氧微生物分解有机质产生大量的恶臭水体,使水体发黑发臭。因此一般水体与黑臭的颜色差别是判别水体类型的首要依据。如图2(a)和(b)所示,黑臭水体呈现黑色、墨绿色,而一般水体呈现绿色、浅绿色。
2)河道淤塞。河道狭窄、排水不畅,或河道封堵,水动力不足形成断头浜,如图2(c)所示,也是导致水体黑臭的重要原因,因此,河道淤塞也是黑臭水体的重要特征和判据。
3)次生环境。当含有大量氮、磷元素的生活污水、农业、工业废水排入河道,会使水体富营养化,导致水华、浮萍泛滥等现象出现,造成次生环境问题,从而引发黑臭,并伴随大量挺水植被的出现,如图2(d)所示。
4)岸边垃圾堆放。当河道两岸堆积大量生活垃圾和建筑垃圾时,若无法得到及时清理,经发酵后散发异味并产生其他污染物,在雨水冲刷等外力作用下进入河道,是造成河流黑臭的主要来源之一。如图2(e)所示,方框内为垃圾堆放处,灰黑色水体为黑臭水体。
1.4 样点分布
由于缺少2016年鸠江区水系实测数据,本文根据官方公布的黑臭水体清单定位黑臭河段,结合目视解译标志判断水体类别,在弋江站主沟,上、下新塘水系,火石埂东和西沟等地共判别并标定了24个黑臭水体样点。同时在青弋江、裕溪河、下坝支渠、青山河、清水河选取了24个一般水体样点。样点分布如图3所示。
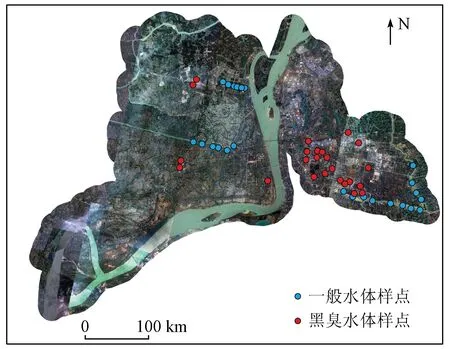
图3 样点分布Fig.3 Sample distribution
2 黑臭水体遥感识别模型修正与精度分析
2.1 模型修正
目前对于黑臭水体的遥感识别,主要是通过波段的线性组合凸显黑臭水体与一般水体的光谱特征和颜色差异,进而构建黑臭水体遥感识别模型,实现黑臭水体的识别与监测。本文尝试利用单波段阈值法、波段差值法、归一化指数法和斜率指数法分别构建识别模型。通过1.4节选取的样点,利用校正后GF-2影像水体的遥感反射率进行建模和阈值修正,对比分析各算法精度,从而选择最优算法。不同算法建模结果如图4所示,算法公式及修正前后阈值如表2。建模结果表明,4种算法均能够区分黑臭水体与一般水体,但结果各有差异。从图4(a)可以看出,对于校正后的GF-2绿光波段反射率,黑臭水体与一般水体均存在较高或较低的样点,两者值域重叠导致基于峰值反射率的单波段阈值法无法有效辨别水体类型; 从图4(b)—(d)可以看出,基于光谱曲线变化趋势的3种算法提升了对这2种水体的区分效果,使得识别精度进一步提高。对比修正前后的阈值可以看出,由于各地区黑臭水体光谱特征和轻重程度不同,同一算法在不同地区的建模结果有明显的差别,不同算法在不同地区的适用性不同,需要根据实际情况,综合评价算法精度,以得到最优算法。
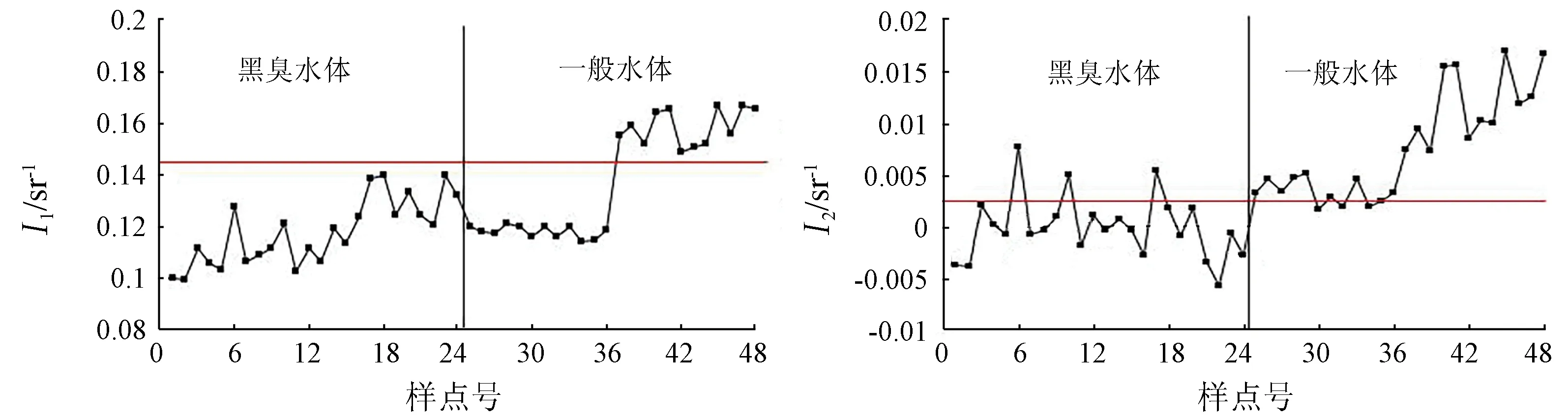
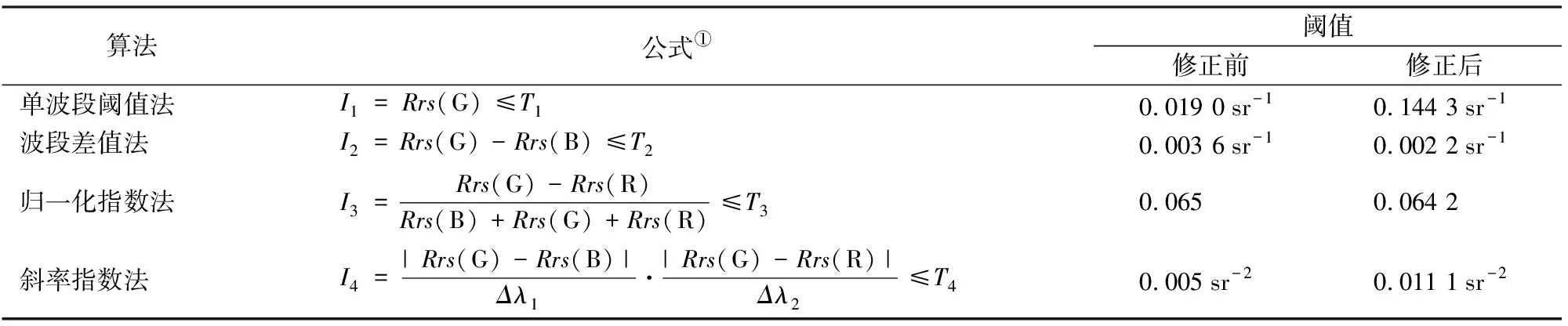
表2 公式及阈值选取Tab.2 Formula and threshold selection
2.2 精度评价
统计样点判别结果如表3所示,本文利用用户精度、产品精度和总精度评价模型精度,并利用Kappa系数检验模型识别一致性,公式如表4所示,计算结果如表5所示。从表5可以看出,波段差值法的用户精度、产品精度以及总精度在4种算法中处于中上等,总精度最高表明其对一般水体和黑臭水体均有较好的识别效果,斜率指数法次之,归一化指数法最差,单波段阈值法虽然对黑臭水体识别效果最好,但对一般水体识别效果较差。并且波段差值法的Kappa系数为0.75说明其识别结果具有高度一致性,明显高于其他算法。算法精度评价结果表明,波段差值法用于识别芜湖鸠江区黑臭水体的精度最高,将其用于黑臭水体的识别与监测可以更好地反映黑臭水体的动态变化。
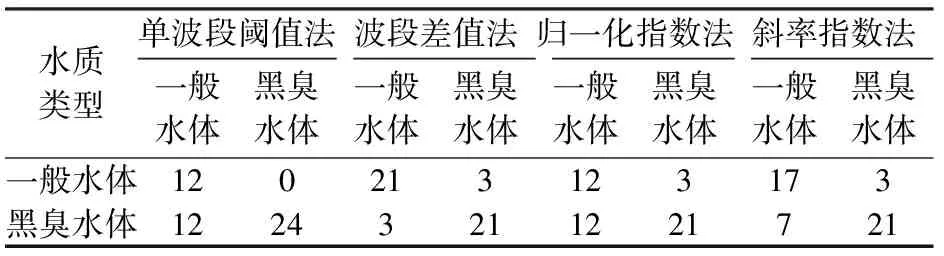
表3 样点判别统计Tab.3 Sample discrimination statistics
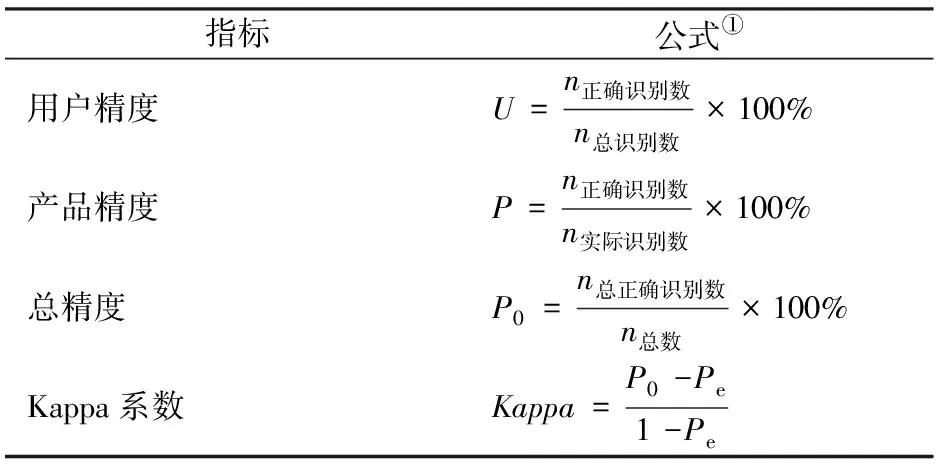
表4 精度评价公式Tab.4 Accuracy evaluation formula
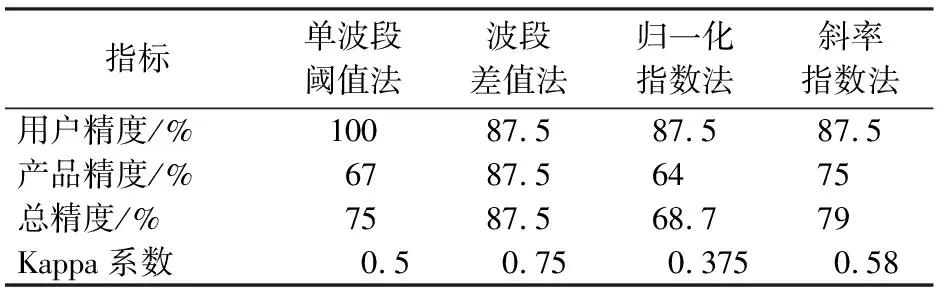
表5 精度统计Tab.5 Accuracy statistics
3 黑臭水体动态监测
鸠江区黑臭水体主要分布在长江以东,扁担河以西的主城区,该区域人口密集,河道沟渠密布,全面掌握其黑臭水体的分布情况和消长变化对于治理和监测水体环境具有重要意义。
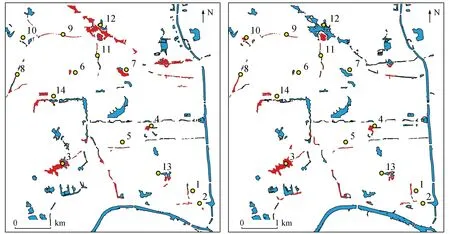
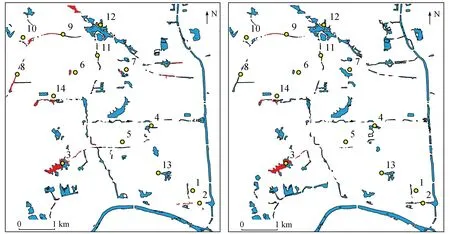
利用获取的2014年12月14日、2016年11月3日、2018年1月1日以及2020年3月19日的GF-2影像,使用波段差值法初步提取黑臭水体,如图5所示,并联合目视解译标志判断水体是否黑臭,验证该方法在动态监测中的可靠性,并分析黑臭水体的变化情况和原因,为相关部门评价黑臭水体的治理效果提供参考。图5表明,2014年鸠江区主城区水体黑臭情况已相当严重,监测区域内不同河段、大小沟渠都出现了不同程度的黑臭现象,主要集中在保兴垾、大阳垾和弋江站主沟; 2016年末,大公沟黑臭现象消失,大阳垾黑臭水体显著减少,新增黑臭河段保兴垾九华北路支沟; 到2018年初,水体环境整体有了明显的改善,不过大阳垾、大公沟出现了水体反黑现象; 截至2020年3月,鸠江区主城区水体除神山公园、保兴垾鸠兹家苑支沟和上、下新塘水系仍有黑臭现象外,其他河段黑臭水体已全部消失。2014—2020年黑臭水体逐渐减少,这与政府的治理和监管有直接的关系,并且从GF-2影像上可以得知,火石埂及东河是通过整改河道治理黑臭(图6),而大阳垾等河道无明显变化,是通过物化或生物等方法治理和修复的。

根据单一算法识别结果,新塘及其周边河段自2014年一直被识别为黑臭水体,但通过GF-2目视解译发现,新塘主体水域面积较大,水面平整无次生环境问题,无明显黑臭水体特征(图7(a)),因此判断为一般水体。查阅相关资料[9]获知,新塘水质较好,水体较深,在可见光波段表现为强吸收,因此在遥感影像呈现暗像元的特征,导致单一算法错判。此外,新塘周边河段2014年和2016年水面浮萍较多、水体呈现黑色,确为黑臭水体,2018年之后,浮萍消失,水面整洁,已变为一般水体,但由于此处河道狭窄,两岸高楼林立,和保兴垾鸠兹家苑支沟相同,均是由于阴影的覆盖,导致其被错判为黑臭水体(图7(b))。

通过以上分析最终得到2014—2020年黑臭水体动态监测结果如表6,2014年、2016年、2018年、2020年黑臭水体面积分别为0.313 km2,0.152 km2,0.069 km2和0.008 km2。

表6 黑臭水体动态监测结果Tab.6 Dynamic monitoring results of black and odorous water
4 结论
根据2016年2月5日公布的芜湖市鸠江区黑臭水体清单,利用单波段阈值法、波段差值法等构建遥感识别模型,联合目视解译标志用于城市黑臭水体长时间动态监测,得到以下结论:
1)单一算法中,波段差值法用于识别鸠江区黑臭水体精度最高,总精度为87.5%,Kappa系数为0.75,说明其识别结果具有高度一致性。
2)结合黑臭水体光谱特征和表观特征,将目视解译用于遥感识别算法的补充,可有效提高识别精度,消除水深、阴影的影响,进一步提高解译精度,并可获知河段黑臭成因,有利于相关部门及时制定治理方案。
3)将本文发展的黑臭水体识别方法用于2014—2019年4期GF-2遥感影像,提取黑臭水体面积从0.313 km2减少为0.008 km2,表明鸠江区主城区黑臭水体逐年减少,相关部门整治效果显著,但应注意水体的反黑反臭等问题,以达到城市水体长治久清的目的。
4)由于本文选择的样点是典型的重度黑臭水体,其判定阈值较低,在识别重度黑臭水体上效果较好,不过对于轻度黑臭水体识别效果较差,未来的研究应该考虑将黑臭水体分级研究,分别确定识别方法及阈值,进一步提高识别精度。
猜你喜欢
湖北植保(2022年4期)2022-08-23
航天返回与遥感(2022年1期)2022-03-09
土壤(2021年1期)2021-03-23
绿色科技(2019年16期)2019-11-22
科技资讯(2018年6期)2018-07-26
土壤学报(2017年5期)2017-11-01
绿色科技(2017年10期)2017-07-05
高师理科学刊(2016年8期)2016-06-15
西藏科技(2015年4期)2015-09-26
河北北方学院学报(自然科学版)(2014年2期)2014-05-30
