
黑臭水体遥感识别研究进展
2021-03-19 00:23陈帅赵文玉廖中平
自然资源遥感 2021年1期
陈帅, 赵文玉, 廖中平
(1.长沙理工大学交通运输工程学院,长沙 410114; 2.洞庭湖水环境治理与生态修复湖南省重点实验室,长沙理工大学水利工程学院,长沙 410114; 3.湖南省水生资源食品加工工程技术研究中心,长沙理工大学化学与食品工程学院,长沙 410114)
0 引言
我国住房和城乡建设部颁发的《城市黑臭水体整治工作指南》[1](以下简称《指南》)定义黑臭水体为呈现令人不悦的颜色和(或)散发令人不适气味的水体,依据透明度、溶解氧、氧化还原电位和氨氮4个水质指标将其分为非黑臭、轻度黑臭和重度黑臭3个等级。国内外学者研究发现,有机物污染、氮磷污染、底泥再悬浮和重金属污染可导致水体黑臭[2-4]。固态或吸附于悬浮物的不溶性物质如硫化亚铁和硫化锰等黑色沉积物,以及溶于水的带色有机物如腐殖质类有机物使水体发黑[5]; 水体发臭则是由厌氧微生物分解有机物产生硫化氢、氨、硫醇等发臭物质引起的[6]。长期以来,黑臭水体不仅破坏河流生态系统,而且影响饮水安全和农产品安全,最终威胁人体健康[7]。
由工业、农业和生活废水过量排放导致的水体黑臭现象得到了广泛关注,国务院颁发的《水污染防治行动计划》[8](以下简称《水十条》)明确指出,到2030年总体上要消除城市建成区内黑臭水体。黑臭水体整治工作刻不容缓,因此对于黑臭水体空间分布监测的需求越来越迫切,尤其是大范围、动态、快速、长期的黑臭水体监测技术对于黑臭水体的科学治理具有特别重要的意义。传统黑臭水体监测依赖实地采样进行化学分析等手段,通过溶解氧、氨氮等水质指标构建黑臭水体的评价体系[9-12]。这些基于水质指标的黑臭水体监测耗时耗力,且不能满足大范围、动态的监测需要。
遥感具有覆盖面积广、时效性强、信息量大、受地理环境影响小等优点,能够为大范围水体变化监测提供全新的技术手段[13]。水体在可见光到红外波段反射率明显低于其他地物,而在近红外和中红外波段的强吸收作用则使反射率极低[14]; 影响内陆水体光学特性的光学活性物质主要有纯水、浮游植物、非藻类颗粒物和有色可溶性有机物(chromophoric dissolved organic matter, CDOM)[15]等。不同水体所含光学活性物质不同,造成对太阳辐射能量的吸收和反射程度有所差异,使得相应的遥感反射率、灰度以及色阶均有所差别[16],例如叶绿素a在685 nm附近有明显的荧光峰[17],CDOM在紫外和蓝光有较强的吸收等[18]。基于这些光学特征,遥感技术在水体提取[19-22]、水深探测[23-24]、水质反演[25-28]以及黑水团监测[29-32]等领域得到了广泛应用。其中黑水团是大量蓝藻的高度聚集导致的局部水体缺氧且发黑,这点与黑臭水体相似。国内学者通过分析黑水团区域反射光谱特征,提出黑水团的遥感判别依据[33-34],并结合室内黑水团模拟试验和实测光学特性构建黑水团识别算法[35],对黑臭水体遥感识别有一定的借鉴意义。
本文总结了黑臭水体遥感识别的研究进展,首先分析黑臭水体不同的识别特征,包括反射光谱特征,水体颜色特征、固有光学量特征等,并归纳已有的一些识别算法; 同时指出目前算法可能存在的问题; 最后对未来发展趋势进行展望。
1 黑臭水体遥感识别现状
研究发现,黑臭水体的反射光谱(遥感反射率曲线)、水体颜色以及固有光学量(如CDOM的吸收系数)与非黑臭水体有明显差异。通过分析水体的反射光谱特征,结合地面实测数据的相关性统计分析,选择最优波段或波段组合来建立模型是水色遥感中常用的方法之一。黑臭水体中溶解或悬浮的污染物成分或浓度不同,使得其颜色与非黑臭水体有一定差异,而色度法正是基于不同颜色的主波长进行水体类型识别的一种方法[36]。水体固有光学量不随入射光场变化而变化,仅与水体中物质成分有关,如吸收系数与散射系数等。通过获得的遥感反射率计算不同物质的吸收系数或散射系数等固有光学量,再根据其固有光学量判断水体黑臭,也可用于识别黑臭水体[15]。以下分别对3种黑臭水体识别特征进行综述分析,并归纳各自适用的算法。
1.1 基于反射光谱的阈值法
基于反射光谱的识别算法通过分析黑臭水体与非黑臭水体的反射光谱曲线差异,选择合适的波段构建模型,再根据不同水体对应的模型值设定黑臭水体的阈值,称为阈值法[36-37]。其中水体遥感反射率根据获取途径可以分为实测反射率、等效反射率以及影像反射率3种。
实测反射率是在野外实地使用地物波谱仪基于表面法[38]测量的水面反射率,具有光谱分辨率高、误差小等特点,通过实测不同水体反射率可发现其反射光谱的差异,从而反映不同类型水体具有的不同特征[15,37,39-40],可用于区分黑臭与非黑臭水体。如图1所示,非黑臭水体在550 nm,675 nm和700 nm左右有特征波峰波谷,而有黑臭现象的水体反射光谱曲线与其相比有明显差异,在曲线波峰波谷和值大小特征上大致可归为3类: 一类水体在400~900 nm波段没有明显波峰和波谷,曲线平缓且值较低; 二类水体光谱在550 nm,675 nm及700 nm处波峰波谷几乎可以忽略,但在750 nm时反射率下降明显,与非黑臭水体趋势相近; 三类水体在400~550 nm范围内快速上升,整体曲线值要高于非黑臭水体和其他黑臭水体,且在675~700 nm间具有非黑臭水体相似的波峰波谷,并在800 nm存在明显的波峰。由此可见,黑臭与非黑臭水体的光谱曲线有较大差异,但目前光谱曲线与黑臭水体分类标准[1]或黑臭成因间关系相关性尚需进一步进行研究和分析。

图1 非黑臭水体和黑臭水体实测反射率[15,37,39]Fig.1 Measure reflectance of normal waterbody and black-odor water body
等效反射率指利用实测反射率通过光谱响应函数拟合所得到的等效多光谱卫星影像反射率; 影像反射率指卫星影像通过辐射定标和大气校正后获得的水体反射率。国内多光谱遥感卫星高分(GF)一号、二号具有空间分辨率和时间分辨率高的特点,可通过将实测反射率拟合为GF多光谱反射率(图2)[37, 39]或直接使用GF影像反射率(图3)[16,41]来研究适用于GF影像的黑臭水体识别模型。
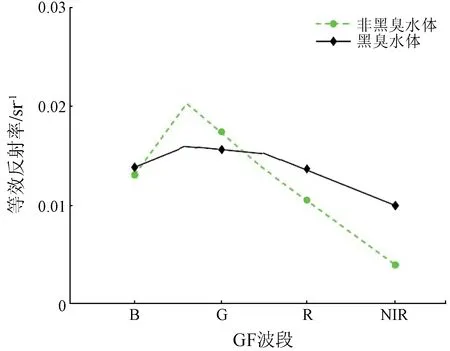
图2 非黑臭水体和黑臭水体等效反射率[37, 39]Fig.2 Equivalent reflectance of normal waterbody and black-odor water body
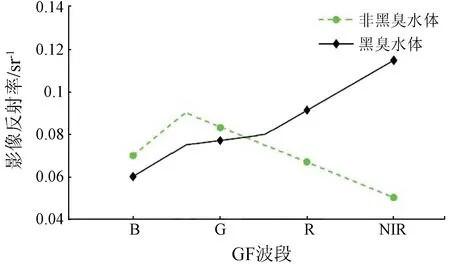
图3 非黑臭水体和黑臭水体影像反射率[16,41]Fig.3 Image reflectance of normal waterbody and black-odor water body
由图2可知,黑臭水体的等效反射率曲线比非黑臭水体平缓,与其实测反射率变化趋势一致; 在绿光波段黑臭水体等效反射率明显小于非黑臭水体,在近红外波段黑臭水体等效反射率值大于非黑臭水体。图3所示为不同水体的影像反射率,为同步GF影像上获取的水体采样点处像元与相邻像元计算均值后得到的不同水体影像反射率[16]。由于大气校正不能完全去除大气影响,影像反射率值比实测反射率值较大。绿光波段,非黑臭水体的反射率在550 nm处有一个荧光峰而黑臭水体无荧光峰; 蓝光波段,黑臭水体的反射率略低于非黑臭水体; 红光到近红外光波段黑臭水体反射率明显上升,而非黑臭水体反射率显著下降。
基于上述黑臭水体与非黑臭水体的反射光谱差异,结合不同类型反射率特点和不同波段组合形式,研究者建立了多种黑臭水体遥感识别模型,见表1。表中,Rrs(555)指在555 nm处实测反射率值;Green,Blue,Red和NIR分别为GF-1,2多光谱卫星绿光波段、蓝光波段、红光波段和近红外波段的反射率; Δλ1和Δλ2分别为蓝光与绿光波段和绿光与红光波段的中心波长间隔。

表1 基于反射光谱的阈值法Tab.1 Threshold method based on reflection spectrum
1.2 基于水色的色度法
水体组分的差异往往导致其显示出不同颜色,因此可利用颜色差异进行遥感分类,即色度法。色度法采用的颜色系统是国际照明委员会(Commission Internationale del’Eclairage,CIE)创建的CIE-XYZ颜色系统,可对颜色进行准确的数字化表示。Duan等[29]通过CIE颜色匹配函数将离水辐亮度转换为湖水颜色来区分湖泊的黑水区域与典型湖水区域; 李佐琛等[43-44]利用色度法模拟叶绿素a、CDOM和无机悬浮颗粒物(suspended inorganic particles matter,SIPM)在不同浓度下水体颜色变化; 董舒[45]通过分析含有铁离子、铜离子等水体的颜色,提出了基于色度法的非接触金属离子监测方法。野外调查发现,黑臭水体除了呈现典型黑色外、还会呈现灰绿色、灰色、墨绿色以及褐色等,而非黑臭水体通常表现为浅绿或浅黄色[36]。因此,国内学者将色度法引入黑臭水体遥感识别中,将红绿蓝波段的反射率通过色度计算公式得到CIE颜色系统中代表水体颜色的主波长,再通过统计分析确定黑臭水体主波长范围,进而对不同水体类型进行识别。
温爽等[37]将黑臭水体的主波长范围确定为528~540 nm,识别正确率仅为37.5%。单纯利用主波长识别黑臭水体正确率不高,进一步通过饱和度S对黑臭水体进行识别[15, 42],识别精度可提高到70%左右。饱和度的计算步骤[15,42,46]如下:
1)根据红光、绿光、蓝光波段反射率R,G,B计算3刺激值X,Y,Z,即

(1)
2)根据刺激值计算色度坐标(x,y),即
(2)
3)计算角度α。在色度图中建立以等能白光点S(0.333 3,0.333 3)为原点的直角坐标系o′-x′-y′,x′轴与色度图y轴平行且方向一致,y′轴与色度图x坐标平行且方向一致。将色度坐标转换为新坐标系下的坐标(x′,y′),并计算向量(x′,y′)与x′夹角α,即
(3)
α=arctan2(y′,x′),
(4)
4)查找波长λ和光谱色度坐标(xλ,yλ)。经过坐标转换后,α角随着颜色主波长递增,将CIE-xy色度图中各波长光谱色度坐标建立一个380 nm到700 nm波长对应光谱色度坐标的主波长角度查找表,根据角度查找表得到对应的λ和光谱色度坐标(xλ,yλ)。
5)计算饱和度S。先计算等能白光点与光谱色度坐标的距离SD,与像元色度坐标的距离SC,饱和度S定义为两个距离比值,即
(5)
S=SD/SC。
(6)
1.3 基于固有光学量的经验算法
不同物质对于内陆水体中的辐射传输影响如下: 纯水具有吸收和散射作用,浮游藻类的色素组成是叶绿素和其他辅助色素,非藻类颗粒物指悬浮于水中的SPIM、非藻类有机物等,后两者都具有吸收和散射作用; CDOM主要是由腐烂物质所释放的黄腐酸、腐植酸组成的溶解性有机物,具有吸收作用,但散射作用可以忽略。内陆水体(指非黑臭水体)的主要固有光学量及其特征分别为: 纯水的吸收系数和散射系数是保持不变的[14,47-48]; 由于叶绿素a和胡萝卜素的吸收作用,浮游植物吸收系数在440 nm和550 nm分别出现极大值和极小值,在675 nm处有一个明显的峰值[49]; 非藻类颗粒物吸收系数和CDOM吸收系数ag(λ)具有相似的特征,即随着波长的增大遵循指数衰减规律[50-51]; 对于散射作用,由于总颗粒物后向散射系数能构建生物光学模型,研究者大多测量总颗粒物后向散射系数并发现其随波长增加呈幂指数衰减[52]。
黑臭水体的浮游植物吸收系数曲线比非黑臭水体缺少2个明显的吸收峰,而曹红业[15]发现黑臭水体的叶绿素a浓度与非黑臭水体无明显差异,说明黑臭水体中还有其他辅助色素对吸收作用有影响。不同类型水体之间的非藻类颗粒物吸收系数差异性较小。黑臭水体与非黑臭水体的CDOM吸收系数在单个样点上差异较小,但在总体样本平均值上有一定差异,黑臭水体的CDOM吸收系数是非黑臭水体的1.4倍[53]。黑臭水体在各个波段的总颗粒物后向散射系数均高于非黑臭水体。丁潇蕾等[53-54]通过无人机高光谱传感器获得遥感反射率,应用经验算法反演440 nm处的CDOM吸收系数ag(440)和浮游植物吸收系数和非藻类颗粒物吸收系数之和即总颗粒物吸收系数ap(440),将其分别作为黑臭水体的识别、分级的指标。当ag(440)>1.25m-1时将水体划分为黑臭水体,其余为非黑臭水体; 当ap(440)>7m-1时为重度黑臭水体,其余为轻度黑臭水体。ag(440)的区分精度是76.36%,ap(440)分级精度达到87.65%,其经验算法模型如下:
(7)
(8)
2 存在的问题
2.1 算法通用性问题
单波段或多波段组合的反射光谱阈值算法简洁方便,计算量小,是目前黑臭水体遥感识别的主流算法。虽然基于反射光谱的识别算法精度高于其他两种算法,但由于其阈值用于采样地区的黑臭水体识别时准确度高,而用于非采样地区时却不够准确,导致其算法移植性不强。张雪等[55]使用阈值法通过GF-1影像对深圳市的水体进行分类,发现该算法将部分黑臭水体识别为非黑臭水体,为提高黑臭水体的识别正确率,需结合地面实测数据对不同模型进行阈值修正。
算法通用性问题主要可能体现在以下两方面:
1)各地黑臭水体成因差异较大且数据量不足以充分显示黑臭水体的光学特性。目前国内学者在较多城市进行采样,但数据量从空间和时间上均不足以充分显示黑臭水体的光学特性[36]。且不同城市水体成分存在差异,南方城市黑臭水体多以河道污泥淤积、沉积的底质污染为主,北方城市黑臭水体是由大量外源性有机物污染进入导致[56]。不同季节的黑臭水体致黑致臭机理不同,夏季适宜的水温加速微生物的新陈代谢,致使水体中有机物分解,释放致黑致臭物质; 秋季藻类等水生植物大量繁殖、引发黑水大面积富营养化,导致水体发黑发臭[36]。
2)星地同步实验难度较大,验证样本有一定的随机性,可能需要进一步验证其算法的准确性。大量的样本更能反映黑臭水体的复杂程度及其真实变化范围,而星地同步实验难度较大,可能导致各模型用于精度评价的样本数量不足,且具有一定的随机性,样本数据如果缺乏代表性,则可能导致算法的准确性需进一步验证。温爽等[37]进行同步实验模型精度评价的采样点只有8个,远少于获取阈值所采用的47个野外实测遥感反射率采样点; 姚月等[39]用于精度评价的采样点14个,远小于获取阈值所采用的96个采样点; 而二者计算比值算法的识别正确率都已达到100%。用于精度评价的样本与确定阈值所采用的样本数相差较大,得出实验获取的识别准确率非常高,可能需进一步进行采样验证研究以确保其可靠性。
2.2 大气校正存在难度
通过遥感数据获取地表反射率需进行辐射定标和大气校正。辐射定标只需要卫星传感器的增益量(gain)和偏移量(offset)数据,这两个数据随遥感传感器的使用状态进行定期更新,通过查询即可获得。基于辐射传输模型的大气校正方法是最符合光学遥感物理机理的方法[57],包括6S[58-59]及MODTRAN[60-61]等使用广泛的模型。使用这些模型需要知道大气参数,尤其是气溶胶光学厚度,而气溶胶光学厚度数据获取并不容易。
在星地同步实验中,可利用太阳光度计实地测量气溶胶光学厚度数据,但卫星传感器无法获取精确的气溶胶光学厚度,需要基于图像自身信息反演。卫星气溶胶反演算法有暗像元法、深蓝算法等[62]。其中暗像元法使用暗地表的红蓝波段数据进行气溶胶光学厚度反演,因此不适用于亮地表的城市地区; 深蓝算法用红蓝波段反演气溶胶光学厚度精度,可能会受到气溶胶垂向分布及相函数的影响[63]; 对于浑浊的内陆水域,使用765 nm和865 nm的反射率比值作为校准参数反演气溶胶光学厚度效果更好[64-65]。
国内陆地遥感卫星快速发展,构建了包括资源、高分、环境/实践和小卫星在内的对地遥感观测卫星系列[66]。由于黑臭水体通常规模较小,因此需要较高空间分辨率的光谱影像数据。其中高分系列卫星如GF-1/2因其空间分辨率可达8 m/4 m且可用数据较多,常用于黑臭水体遥感识别研究,但其近红外波段范围为0.77~0.89 μm,无法构建765 nm和865 nm的反射率比值反演气溶胶光学厚度数据,处理复杂的内陆水域较为困难; 其他高分卫星如GF-4/5的空间分辨率较低不足以满足黑臭水体识别要求; GF-6卫星空间分辨率足够且可提供765 nm和865 nm反射率值,可进行内陆水域的气溶胶光学厚度反演,但由于可用数据不多目前尚未有研究将其应用于黑臭水体遥感识别,类似的还有珠海一号等。此外,研究者常根据季节和纬度选择气溶胶厚度经验数据,这样可能导致大气校正不够准确,不一定能反演真实情况。
有人提出用更简便的瑞利散射替换气溶胶散射,因为瑞利散射只需要大气压和高程数据即可,且使用瑞利散射反射率和气溶胶反射率计算的模型值具有较好相关性。当气溶胶光学厚度较小时,黑臭水体和非黑臭水体基于瑞利散射反射率所计算的模型值差距大,可用于识别黑臭水体; 但当气溶胶光学厚度逐渐增大时,遥感图像可能越来越模糊,黑臭水体和非黑臭水体基于瑞利散射反射率所计算的模型值差距越来越小,区分黑臭水体和非黑臭水体的难度将增大[39]。所以如何选择合适的大气校正方法并进行黑臭水体识别的深入研究,将有助于提高星地同步实验对黑臭与非黑臭水体的识别区分度。
2.3 识别特征精确度不足
目前使用反射光谱、水体颜色、部分固有光学量作为识别特征进行黑臭水体遥感识别,总体来看,这些识别特征能粗略区分黑臭水体和非黑臭水体,但可能不能表征黑臭水体形成机理的关键因子,基于这3种识别特征构建的模型会出现黑臭水体与非黑臭水体重叠现象从而影响识别精度。
部分非黑臭水体实测反射率曲线经过光谱响应函数拟合后可出现和黑臭水体相近的走势,波段组合中的比值模型可能会将一些非黑臭水体划分为黑臭水体[38]。黑臭水体与非黑臭水体在440 nm处的CDOM吸收系数的均值有一定的差别,但在其有效吸收系数范围内存在一定重叠,从而造成二者区分度不高[53]。与此类似的还有其他固有光学量,如750 nm处浮游植物吸收系数、440 nm处非藻类颗粒物吸收系数等。黑臭水体与非黑臭水体的颜色有时可显示出一定的相似性,且高分影像4个波段中心波长和CIE标准颜色系统不能完全一一对应,故基于色度法区分水体是否黑臭也存在一定的偏差[45]; 另一方面城市湖泊水体吸收较强,遥感反射率值较低,在影像上呈现暗像元的特征,影响了色度法划分黑臭水体的阈值,使得一些黑臭水体可能被误判为非黑臭水体。
3 结论与展望
自《指南》和《水十条》颁布以来,我国黑臭水体治理工作逐步开展,城市黑臭水体问题得到了一定程度的缓解。但由于我国水系繁多,水体黑臭成因复杂,且黑臭经常反复,难以根治,因此其监测需求仍然持续增长。
遥感可为黑臭水体长期监测提供大范围、动态、快速的技术手段,因而近年来发展迅速。本文通过分析黑臭水体和非黑臭水体在反射光谱、水体颜色以及固有光学量3个特征上存在的明显差异,归纳了基于不同识别特征的识别算法: 基于反射光谱的阈值法(波段比值)、基于水体颜色的色度法及基于固有光学量的经验算法(线性回归)。其中色度法与固有光学量的经验算法研究方兴未艾,但模型较为复杂且需排除的干扰因素较多,仍需进行大量的研究; 阈值法模型简单、计算方便,目前是黑臭水体遥感识别的主流算法。
已有的黑臭水体遥感识别算法虽然已应用于黑臭水体监测,但仍存在一些问题: 从算法通用性来看,阈值法存在通用性低的问题,主要原因在于各地黑臭水体成因差异较大且数据量不足以充分显示黑臭水体的光学特性,且星地同步实验难度较大,验证样本有一定的随机性; 从数据源来看,虽然目前遥感数据源众多,但由于黑臭水体规模较小且可用数据获取有一定难度,目前识别黑臭水体最主要的遥感数据来源局限在GF-1/2卫星,且由于其波段限制,导致基于图像自身信息的大气校正不够准确; 从识别特征来看,部分黑臭水体和非黑臭水体在3种识别特征上可能存在稍许重叠,从而导致识别特征的精确度存在不足。
由此可见,黑臭水体遥感监测存在较大需求,研究工作已有一定进展,但还远不能满足全国性、长期性的业务化监测需求,仍存在较多难点与挑战。结合已有算法存在的问题,本文对今后的研究提出以下几点展望:
1)进一步挖掘和丰富黑臭水体的识别特征。在水质反演中,有研究提出反射光谱曲线形态特征,包括极值、对称度、光谱编码、三阶导数等作为模型变量,实现pH值、钾与氯离子比值、镁离子与碱度比值等水质参数的反演[67]。通过反射光谱曲线形态特征可放大水体中不同物质之间的差别,有助于挖掘新的识别特征。申茜等[68]分析反射率曲线极大值、极小值和拐点对应的特征波长,结合浮游植物色素的吸收光谱和太湖水体特有的组成成分给出了水体反射率在350~900 nm波段范围内18个特征波长,丰富的特征波长有利于建立更精确的水质反演模型。水体黑臭的形成是由多方面的因素相互作用的结果,需要设计实施严谨的实验来探究黑臭水体形成机理,而遥感技术作为一种远程监测技术,主要以获取水体遥感反射率作为数据基础,所以从水体光学特性深入研究黑臭水体的形成机理,进一步挖掘和丰富黑臭水体的识别特征将成为未来黑臭水体遥感识别的重要内容。
2)进行反射光谱分类。基于反射光谱的识别算法对于区分黑臭水体与非黑臭水体的效果最好,但在不同地域不同季节仍然表现出有限的适应性,影响算法整体识别精度,同样这种情况也出现在藻蓝蛋白反演上。郭一洋等[69-70]采用先分类再反演的策略,首先采用逐步迭代的K均值聚类方法进行光谱分类,然后分别对每一类反射光谱建立最适用于该类的反演模型,通过检验证明分类再反演有效地提高了反演精度。不少研究者对黑臭水体的反射光谱也进行分类,但并没有针对每一类反射光谱建立不同的识别模型[15,40]。未来扩大黑臭水体采样规模或整合目前已有的黑臭水体反射光谱,建立全国黑臭水体光谱库,寻找最佳分类策略进行科学分类,建立相应的识别模型,将极大地提高识别算法精度。
3)运用机器学习算法。目前采用的经验算法虽然计算简捷,但由于遥感反射率与黑臭水体各特征相关性得不到有效证明,导致经验算法移植性不高。在大数据时代,机器学习算法致力于研究如何通过计算的手段,利用大量数据来改善系统自身性能[71]。常用的机器学习算法有人工神经网络(artificial neural network, ANN)、支持向量机(support vector machines, SVM)、随机森林(random forest, RF)等。机器学习算法在遥感分类反演方面已有一定应用,Kim等[72]利用GOCI卫星数据基于随机森林和支持向量机等机器学习算法对叶绿素和悬浮颗粒物等水质参数进行反演,其中反演叶绿素的决定系数R2为0.91、悬浮物的R2为0.98。孙驷阳[73]利用多种机器学习算法构建总氮、总磷、氨氮和COD这4种水质参数的反演模型,发现R2高于0.99。黑臭水体的评价指标包括透明度、溶解氧、氨氮等,对这些指标反演精度高的机器学习算法将对黑臭水体的识别研究有较大帮助。
猜你喜欢
印制电路信息(2022年11期)2022-11-30
海洋通报(2022年4期)2022-10-10
光谱学与光谱分析(2022年4期)2022-04-06
航天返回与遥感(2022年1期)2022-03-09
绿色科技(2019年16期)2019-11-22
科技资讯(2018年6期)2018-07-26
绿色科技(2017年10期)2017-07-05
高师理科学刊(2016年8期)2016-06-15
西藏科技(2015年4期)2015-09-26
黑龙江科技大学学报(2014年2期)2014-11-12
