空间相机超轻次镜环境适应性分析及试验
2021-03-19 03:14武永见孙欣刘涌
环境技术 2021年1期
武永见,孙欣, 刘涌
(1.北京空间机电研究所, 北京 100094; 2.先进光学遥感技术北京市重点实验室, 北京 100094)
引言
空间相机在地面装调、发射入轨以及在轨运行期间不可避免的受到重力、温度以及动力学影响。特别对于同轴反射式系统而言,由于次镜往往位于光学系统前端,其发射阶段的力学环境以及在轨运行阶段的温度环境相对恶劣。如何通过合理选用次镜材料、优化次镜结构实现超轻、高比刚度次镜设计,以及如何设计具备力热卸载能力的支撑结构适应重力、温度以及动力学环境的影响成为实现空间相机次镜设计的关键[1]。
本文采用一种基于运动学原理的三点bipod离散支撑技术,针对某Φ288 mm口径次镜的高轻量化率、高刚度、高力热稳定性的要求。从反射镜材料选择、轻量化形式以及柔性支撑方案等方面进行了详细设计。
利用有限元软件分析了次镜以及组件在重力、温度以及强迫位移下的面型,并分析了次镜组件的动力学响应,结果表明次镜组件能够很好的适应各类环境工况,满足相机各项使用要求。
1 超轻次镜设计
1.1 反射镜材料
常用的反射镜材料包括碳化硅(SiC)、微晶(Zerodur)、ULE玻璃以及低温光学中常用的铍(BE)等,不同材料的性能如表1所示。
SiC材料具有较高的弹性模量以及热导率,通过反应烧结可以获得较大的空间尺寸,这种材料在国内外多个空间相机中都有广泛应用,但是由于材料具有较高的精度,因而加工难度和周期相对较长。
BE镜主要用于低温光学,在低温下性能优异,但该材料粉末有毒,在国内空间相机上应用较少,美国詹姆斯韦伯(JWST)空间望远镜的分块反射镜即是BE镜。
微晶材料具有极低的热膨胀系数,良好的加工性能,因而在国内多个空间相机的中小口径反射镜上有着广泛应用,但难以实现超高轻量化设计,一定程度上限制了该种材料在未来超大口径相机中的应用。
ULE材料除了在20℃左右具备极低的热膨胀系数以及良好的机加性能外,通过蜂窝夹芯设计可以实现超高轻量化率设计,在美国地球之眼系列商业遥感相机以及国内各类空间相机中应用广泛[2]。
1.2 轻量化设计
次镜为口径Φ288 mm的凸二次双曲面反射镜,面型要求达到PV≤0.14 λ、RMS≤0.014 λ(λ=0.632 μm)的高精度指标。
ULE反射镜的蜂窝夹芯设计是实现超轻的关键,夹芯轻量化筋的形式主要有三角形、四边形以及六边形,其中三角形轻量化筋的布局形式能够获得更高的比刚度,而且具有良好的温度适应性。
在满足水切割以及面板焊接工艺性的前提下,通过优化面板厚度、背板厚度、外环厚度、镜体总厚度以及轻量化筋的厚度、间距等参数,实现了反射镜重量2.0 kg,面密度30.7 kg/m2的超轻设计。次镜见图1,蜂窝夹芯的参数如表2所示。
1.3 次镜有限元分析
次镜自身良好的静态和动态刚度是开展支撑结构设计的基础,采用有限元法对次镜在光轴竖直放置工况(检测状态)环境下的面型,重力对反射镜面型RMS影响小于λ/100,如图2所示。
分析次镜前十阶自由模态,其中第一阶非零模态频率为3 201 Hz,振型如图3所示。
约束次镜背部三处Φ50区域有限元节点(胶结区域),计算可得次镜前六阶模态,一阶频率为2 972 Hz,如图4所示。反射镜动态刚度性能优异。
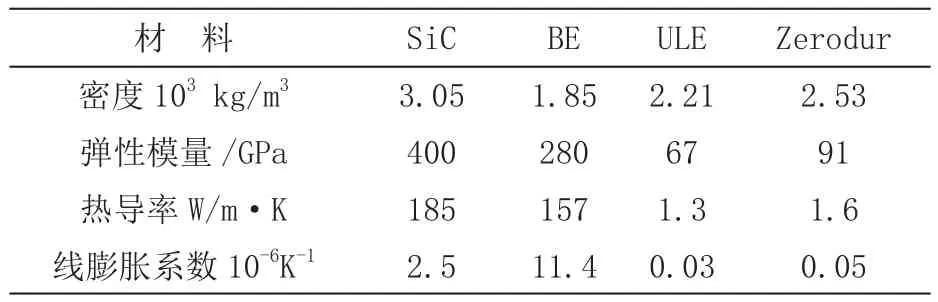
表1 常用材料性能参数

表2 蜂窝夹芯层的轻量化筋参数
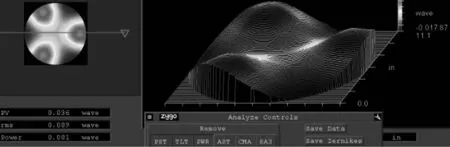
图2 重力对面型影响

图3 次镜自由模态(第一阶非零模态)
2 次镜支撑结构设计
2.1 支撑方案
支撑方案设计的关键是通过符合运动学支撑原理的结构设计和布局,确保次镜组件刚度满足要求并确保在重力、温度等环境影响下具有良好的面型,同时尽量轻量化设计。由于反射镜口径较小,支撑方案采取基于准运动学原理的bipod柔性支撑方设计,如图5所示。
2.2 支撑结构参数
通过优化设计支撑参数实现次镜的稳定支撑,主要支撑参数包括:

图4 次镜一阶约束模态

图5 次镜支撑结构示意
1)支撑点数和支撑半径;
2)bipod夹角;
3)bipod杆长度、直径;
4)bipod粘接面的胶层厚度、直径。
反射镜最小支撑点数可以通过Hall公式给出,预估圆形平面镜的最小支撑点数N如下:

其中:
N—预估的支撑点数;
D—主镜直径(mm);
t—主镜厚度(mm);
ρ—主镜密度,kg/mm3;
E—弹性模量,MPa;
δ—容许的镜面PV值,mm。
基于三点支撑的准运动学特性,国内外反射镜离散支撑多采用3点(6,9点支撑通过bipod和whiffles转换也可等同为3点支撑)形成无应力(微应力)支撑。同时大量的文献[3]研究了反射镜支撑圆直径和光轴竖直状态下重力因素对面型的影响关系[4,5]。
Bipod杆的长度和直径尺寸和组件刚度直接相关,其中长度尺寸受制于光机结构空间布局影响。一般根据空间约束取定后优化bipod杆的直径,从而获得适宜柔性的bipod杆尺寸。不同bipod杆直径对次镜组件的模态影响如图6所示,其中横坐标为bipod杆直径尺寸(mm),纵坐标为对应的组件一阶频率(Hz)。
可以看出,组件一阶频率与bipod杆的直径成正比关系,bipod杆直径2 mm即可实现该超轻反射镜一阶频率大于100 Hz。
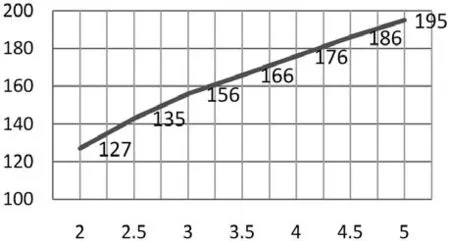
图6 bipod杆直径与次镜一阶频率
确保次镜离散支撑具有良好重力卸载的关键是确保bipod杆具有较好的柔性。因此需要分析bipod杆直径对重力作用下次镜面型的影响。如图7所示,其中横坐标为bipod杆直径尺寸(mm),纵坐标为对应的次镜面型RMS。分析可知在直径2~2.5 mm时次镜具有最优的面型RMS,表明组件具有较好的重力卸载能力。
次镜组件支撑结构参数优化结果如表3所示。
3 环境适应性分析
3.1 分析方法
建立次镜组件的有限元模型(FEM),通过有限元分析软件Patran/Nastran进行各类工况的加载、分析及数据读取。反射镜面各节点的数据则通过Matlab处理成“.xyz”格式文件后导入MetroPro,从而绘制反射镜面型云图。
3.2 重力环境适应性分析
重力环境适应性分析用于考核次镜及次镜组件在1 g重力作用下的变形情况,确保地面装调和在轨运行期间的状态一致性。
次镜及次镜组件在1 g重力作用下的面型RMS分别如图8和图9所示。分析可知次镜自身由于具有良好的比刚度,因此在重力作用下的面型RMS达到0.009 λ(λ=632.8 nm),次镜组件在bipod柔性卸载作用下面型RMS为0.012 λ,实现了良好的重力卸载能力。

图7 bipod杆直径与次镜面型
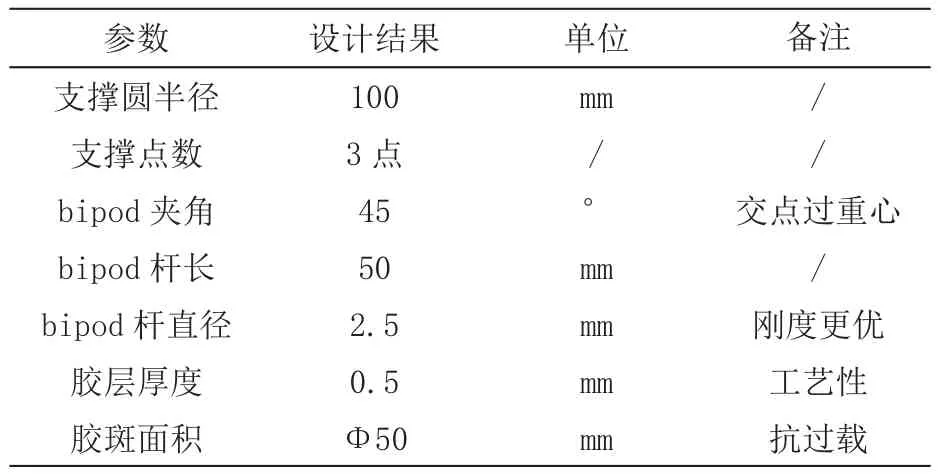
表3 支撑结构参数
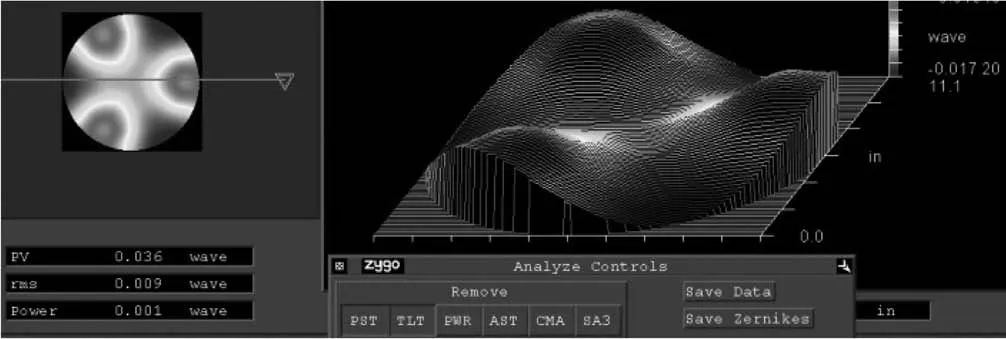
图8 次镜检测状态(光轴竖直)重力影响
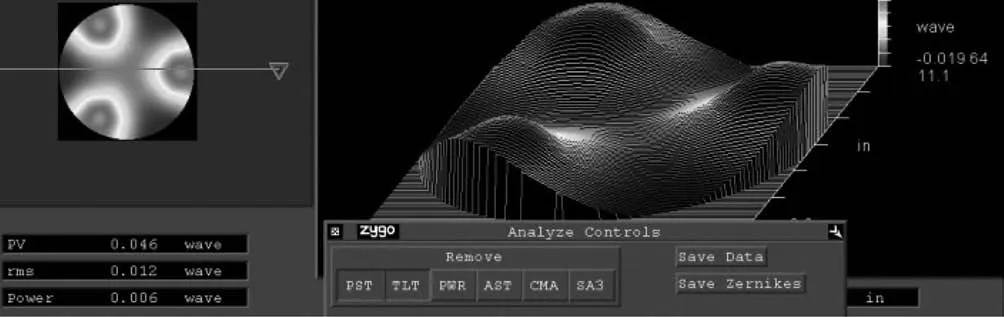
图9 组件装调状态(装调方向)重力影响
3.3 温度环境适应性分析
温度适应性分析用于考核次镜组件在装调以及在轨期间由于温度环境变化导致的面型下降。分别对组件施加1 ℃均匀温度变化、1 ℃径向以及轴向温度梯度,分析次镜面型。次镜组件在三种工况下的面型和云图如表4所示,分析结果表明次镜组件在三种工况下的面型RMS下降均不超过0.001 λ,具有良好的温度环境适应性。
3.4 胶斑收缩分析
胶斑收缩分析用于考核次镜背部的光学胶在固化过程中由于体积收缩造成的内应力对次镜面型的影响。
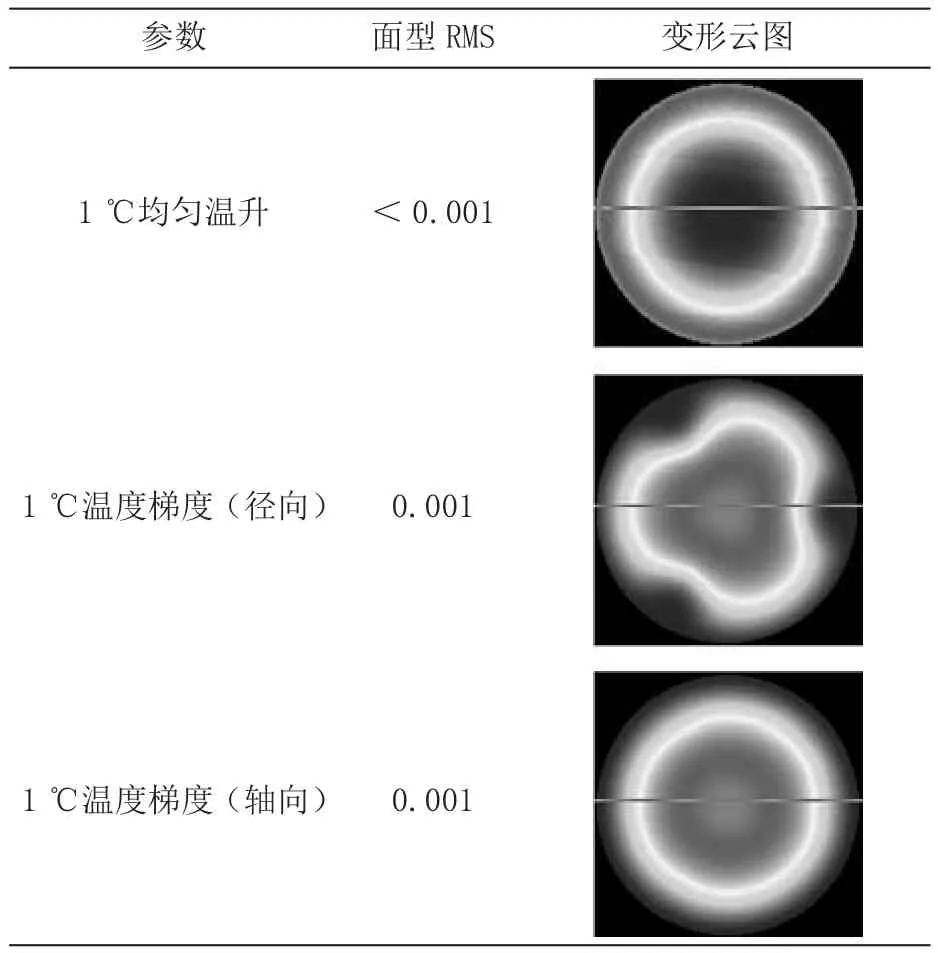
表4 温度适应性分析结果
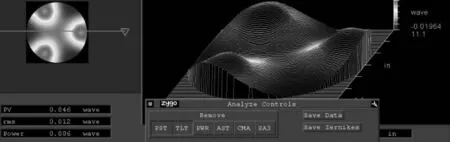
图10 胶缩影响
次镜通过RTV-566光学胶与殷钢PAD连接,胶层厚度为0.5 mm,按30 %收缩比分析可得次镜的面型如图10所示。分析表明胶斑固化收缩造成的次镜面型下降不超过0.001,满足总体要求。
3.5 过载分析
通过分析次镜组件承受多倍重力加速度情况下的光机结构应力值,发射载荷的能力。轴向及径向50 g过载下光机结构应力值如表5所示,全部应力值远小于许用应力,满足过载设计要求。
3.6 模态分析
模态分析用于识别次镜组件各阶模态频率,考核组件的动态刚度。次镜组件的前三阶频率及振型如表6所示。一阶模态135 Hz,振型表现为次镜组件绕bipod杆的摆动。
4 振动试验验证
振动试验(如图11所示)用于在次镜组件完成装配及测试后考核其抗力学能力,其振动条件根据相机分系统在卫星上的响应情况给出。该试验是确保超轻反射镜及其支撑结构能够适应发射阶段环境的关键。
次镜组件开展了X、Y和Z三个方向的特征级及正弦、随机振动试验,图12为次镜组件X向扫频结果,组件基频132.6 Hz,与有限元仿真分析结果相差不到2 %,验证了分析有效性。
表5 过载分析结果
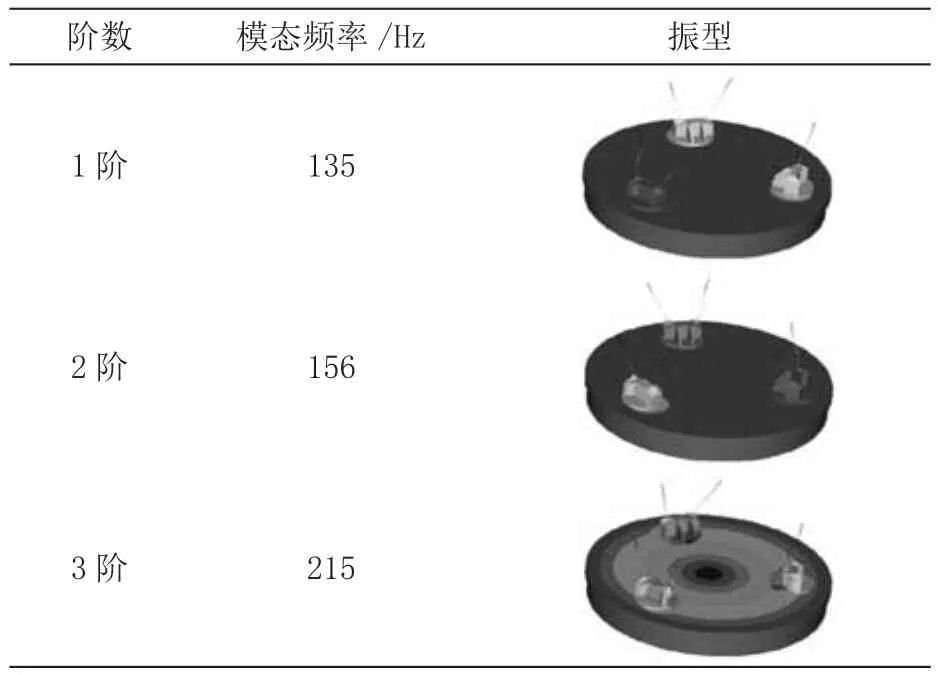
表6 模态分析结果
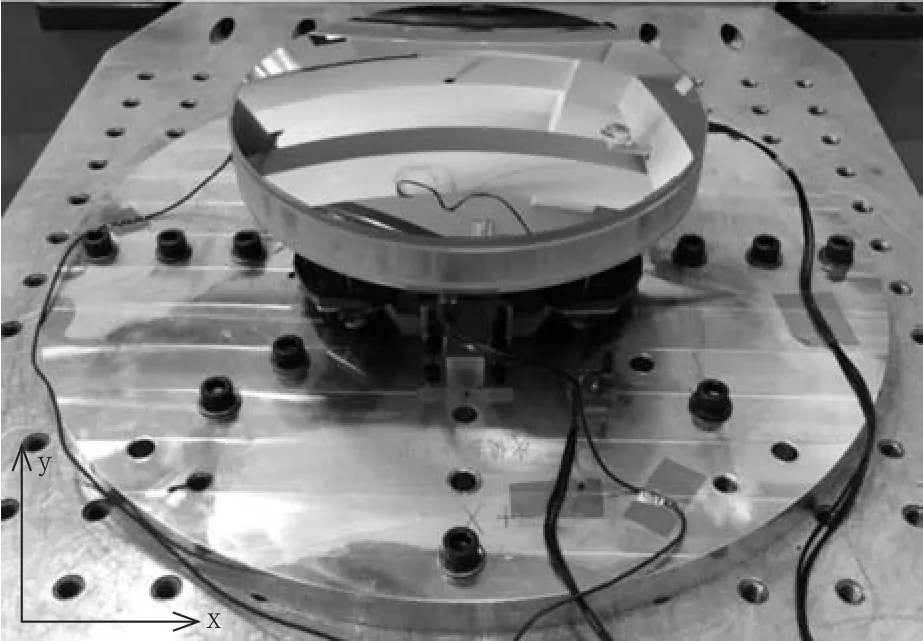
图11 动力学试验

图12 X向特征级
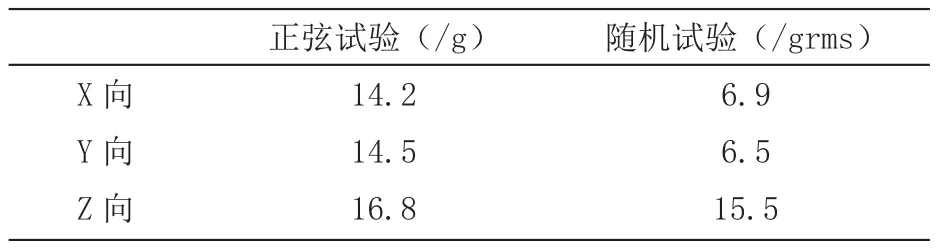
表7 次镜背部测点响应
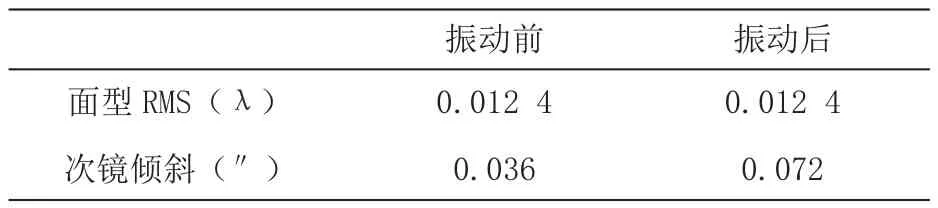
表8 振动前后影响
表7为次镜组件径向及轴向的正弦和随机试验时次镜背部测点响应,结果表明振动试验量级小于设计裕度。
表8为试验前后次镜面型以及与支撑背板夹角变化的实际测试结果,结果表明次镜面型及空间位姿在试验前后保持稳定,组件通过振动考核。
5 结论
本文针对某Φ288 mm口径的次镜进行了蜂窝夹芯式结构超轻量化设计,基于运动学原理设计了一种三点bipod柔性支撑方案,并通过有限元分析考核了次镜组件在重力、温度、胶斑收缩以及过载工况下的环境适应性,最后通过振动试验验证了仿真分析的有效性以及超轻次镜及柔性支撑方案的可行性。
猜你喜欢
新能源科技(2022年9期)2022-11-20
小哥白尼(神奇星球)(2022年5期)2022-08-15
汽车实用技术(2022年11期)2022-06-20
中华养生保健(2020年10期)2021-01-18
科普童话·神秘大侦探(2020年3期)2020-05-11
空间控制技术与应用(2019年6期)2020-01-09
航天返回与遥感(2019年2期)2019-05-17
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
航天返回与遥感(2018年6期)2019-01-07