
基于FPGA的双向同步技术及守时方法
2021-03-19 09:27陈文攀
雷达与对抗 2021年1期
倪 磊,黄 镠,顾 苏,陈文攀
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
随着现代战争舰载作战平台的机动性能大大增强和远程制导武器的广泛应用,雷达传感器作为战场的千里眼迫切要求其能够及早发现并跟踪目标。现有武器装备受到单平台雷达传感器的类型、精度及其视距的限制,很难满足对抗现代精确制导武器的需要。采用舰-岸、舰-舰双/多基地的多平台联合作战,实现海上编队多平台协同探测,将整个作战兵力组成一个网络,共享作战资源和情报资源,形成统一集成的战场态势图,确保战场优势,是现代战争的必然趋势。而如何确保编队中各节点实现高精度的时间同步在现代网络作战中就显得尤为重要。
现有的技术往往是基于卫星共视方法进行授时与同步。这样对于卫星设备的依赖性很大,实际作战时就显得很不可靠。文献[1]中提出了无线RTT时钟同步的相关算法。该算法往往需要占用较多的时隙资源来进行对时而导致通信效率降低。同时,编队各节点设备的晶振不可避免地存在一定的频差,这将导致一定的同步误差。这个误差跟实际的频差以及对时的周期有关,存在一定的局限性。本文在此基础上提出守时的方法,使得能够在较少的通信时隙资源占用的情况下获得更高的时间同步精度。
1 双向同步技术
时间双向比对系统[2]主要由1个中心站和1个外站组成,两边各自产生本地的时间基准,然后外站依靠时间同步技术保持与中心站点的高精度时间同步关系。双向同步技术主要就是通过微波通信链路交换时间同步信号,然后通过必要的运算得到两边时间差的过程。[3]
具体原理如图1所示。图中,节点A为需要对时的节点,节点B为参考节点。首先由节点A发起对时业务,然后在t1时将对时包发出,然后转为接收模式,节点B默认接收,在t2时收到A发出的对时包,然后在t3时发出,发出的包内打入t2、t3两个时间点。节点A在t4时收到B发出的反馈包,此时节点A就可以获取到t1、t2、t3及t4这4个时间点。[4]
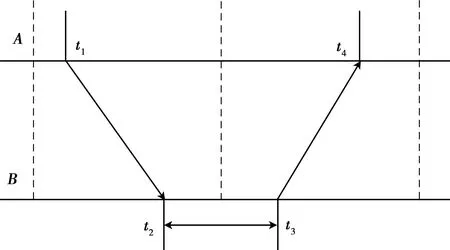
图1 双向时间同步原理图
假设A到B传输的时延为Δ,A与B的时间偏差为ε,则有
t2-t1=Δ+ε
t4-t3=Δ-ε
经过简单的转化可以得到
这样,只需通过ε调整A本地的时间即可实现A与B的时间同步。如果是理想情况下,对完一次时之后再重复上述过程,得到的时间偏差应该为0。但是,实际测试会发现还有一定的时间偏差。这个偏差就是由两边的时钟的频偏引起的,同时还与选取的对时周期有关。如果仅通过这种方式对时,则需要进行频繁的对时操作才能保证相应的时间同步精度,就会占用较多的时隙资源,而且一旦停止对时时间精度会很快恶化。
2 守时方法
针对上面提到的问题,本文在双向时间同步技术的基础上提出了守时方法。利用这种方法,不仅对两边的时间进行对准,还对两边的时钟偏差进行对准。一旦两边的时差、钟差都消除之后,就可以保持长时间的时间同步。具体的实现流程如图2所示。
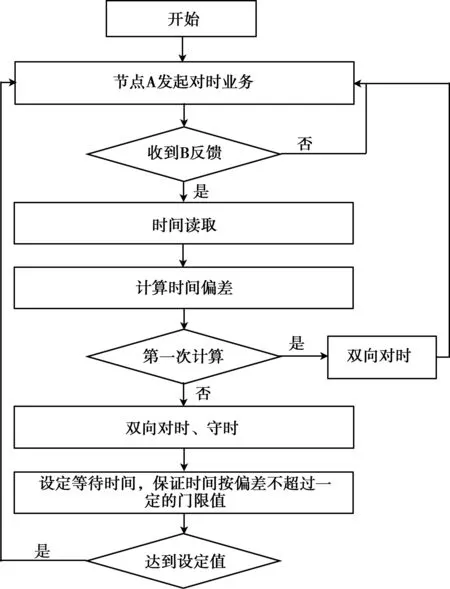
图2 添加了守时方法的流程图
首先,当节点A发起对时业务时,记下发包时刻t1。节点B收到对时申请包后,记下收包时刻t2,然后做出回复,记下回复时刻t3。同时,将t2、t3填入回复包给节点A。节点A在t4时刻收到回复包后利用t1、t2、t3及t4算出两边的时差,然后利用时差调整本地时间,即完成第一次时间同步,即上述的双向时间同步的过程。然后,经过对时周期T后,节点A再次发起对时业务。按照上述流程进行包交换后,得到这次的时差ε1。这时,除了进行双向时间同步的操作外还需要进行守时操作,即利用ε1与T的比值来调整本地时钟的控制字M,用到的具体公式如下:
通过控制字M的调整,就可以完成节点A与节点B的时钟对准。最理想的效果就是A与B的时钟完全对准,但实际由于对时周期T的选取以及有效位数的限制,并不能达到理想的效果。所以,进行完一次这样操作后,隔一段时间后还需要再次进行上述操作,不过这个时间间隔比只采取传统的双向对时技术的系统要长得多。这样的话,对时操作所占用的时隙资源会减少很多,这对于作战任务的编排大有裨益。
3 测试结果分析
按照上述流程进行FPGA设计后,搭建如下测试平台,如图3所示。两个节点分别由PowerPC板、FPGA板以及射频前端组成,另外采用第3方测试平台与之配合,观测实际两节点的时间同步情况。
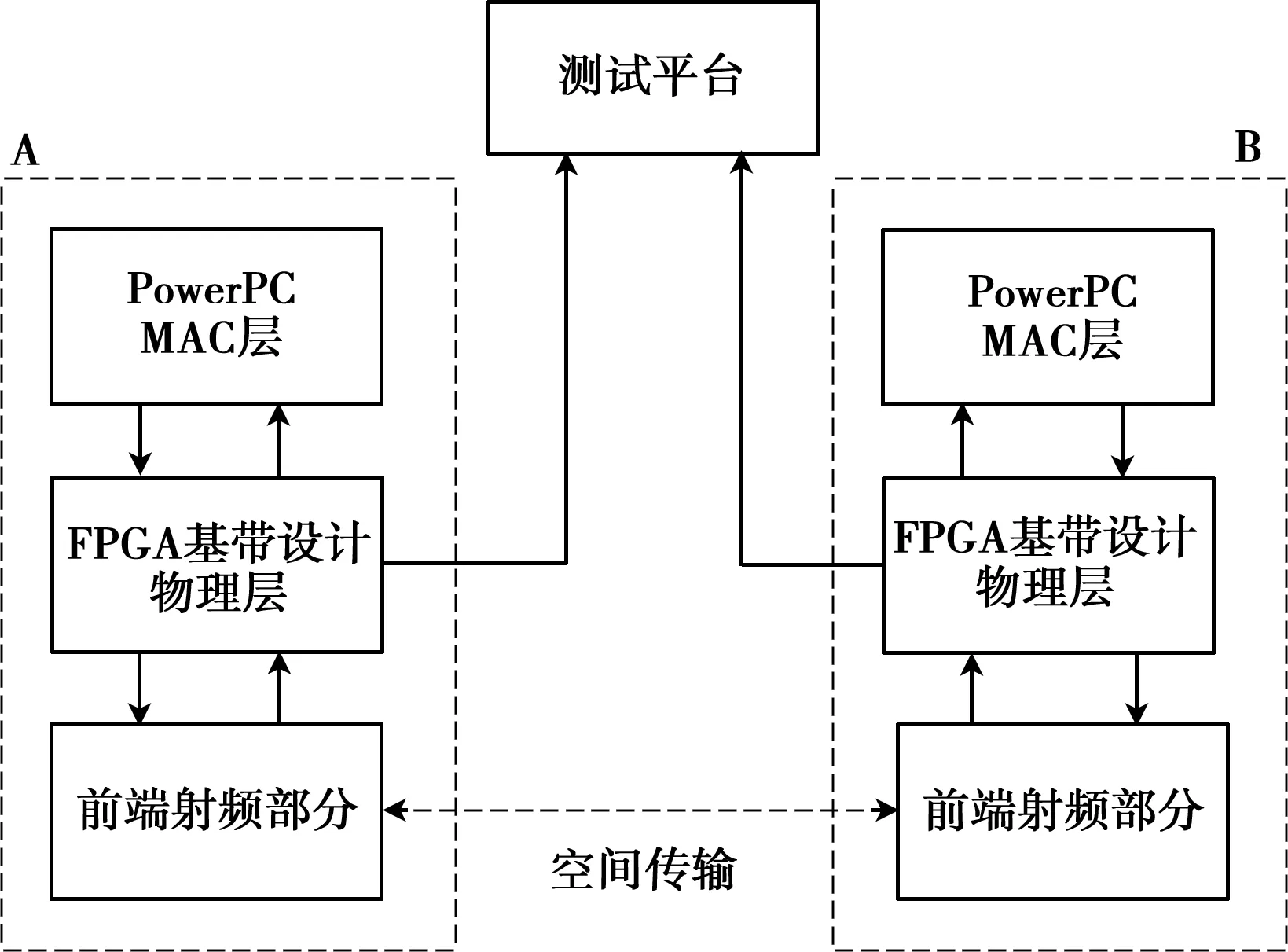
图3 测试平台搭建
测试平台的测试结果如图4所示。图中,横坐标为时间,1格表示1 s;纵坐标为两个平台的时间差值,1格表示12.5 ns,这里选取对时周期T为1 s。可以看出,完成一次双向时间同步与守时操作之后,两边时间偏差随着时间成线性变化。当时差超过一定值前,再进行一次双向时间同步与守时,由可以将时差基本调整为0,完成一次之后时间偏差会随着时间再逐步变大。实际的实现效果如图4所示。
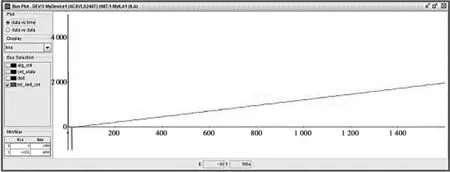
图4 单次双向时间同步与守时的结果
实际对于对时间隔的选取主要取决于对时周期T的选取。由于篇幅所限,这里将测试的结果汇总如表1所示。这里选取完成一次双向时间同步与对时之后450 s时为参考。可以发现,时间周期T选取的越大,对于控制字M调整得越精确,最后的时间精度保持得时间越长。
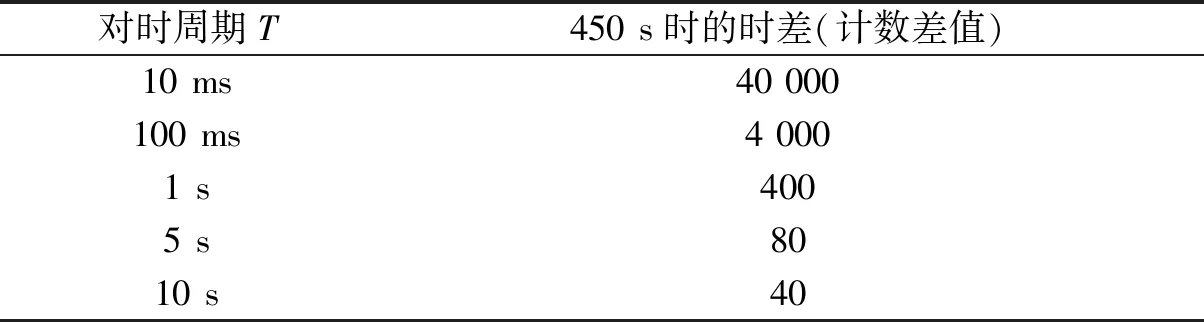
表1 测试结果汇总
如果将精度要求设置为1 μs、时间周期T为5 s时,在经过450 s再进行一次双向时间同步与对时操作就可以满足精度要求。但是,对于100 ms而言,同样的精度要求就需要在9 s后进行一次双向时间同步与对时才能满足精度要求。选取合适的对时周期T可以实现长时间的时间同步,减少时隙资源占用,具有很好的实践价值。
4 结束语
本文在双向时间校时的基础上进一步提出了守时的方法。这样可以有效地减少时隙资源占用,并通过实际实现验证了可行性,对于相似的系统设计具有一定的借鉴意义。
猜你喜欢
数字技术与应用(2022年7期)2022-08-03
汽车实用技术(2022年9期)2022-05-20
今日农业(2021年19期)2021-11-27
舰船电子对抗(2020年2期)2020-06-23
新传奇(2019年29期)2019-08-06
人大建设(2018年7期)2018-09-19
科学与技术(2018年23期)2018-06-17
夜郎文学(2017年4期)2017-09-17
小天使·一年级语数英综合(2016年5期)2016-05-14
山东工业技术(2016年5期)2016-03-04
