
机载三轴云台的ESO_LQR复合控制方法
2021-03-18 03:03马翰廷卢艳军
沈阳航空航天大学学报 2021年1期
林 峰,马翰廷,卢艳军
(沈阳航空航天大学 自动化学院,沈阳 110136)
多旋翼无人机目前已广泛用于航空遥感领域,将遥感相机装载在机载三轴增稳云台上可有效抑制无人机机身姿态变化带来的干扰角运动,使相机光轴在空间内保持稳定,消除图像抖动并精准跟踪目标[1]。
机载三轴增稳云台负载端的干扰主要来自无人机机身姿态变化与云台控制通道的耦合作用,这些干扰具有不确定、非线性等特点,快速抑制多源扰动是机载三轴增稳云台的控制核心[2]。三轴云台的经典控制方法多为PID控制[3],但PID控制器在工作中无法实时整定参数,超调量与反应快速性也是无法消除的矛盾,其在复杂工况下难以快速抑制扰动保证云台系统稳定。LQR控制器的鲁棒性及快速性较PID控制器要好,但是比较依赖系统的精确模型,对不确定系统的控制能力较弱[4]。扩张状态观测器(ESO)能实时观测不确定系统的各状态,通过补偿不确定系统中的扰动将原系统变成串联积分型系统以方便控制[5]。
本文针对机载三轴增稳云台在工作时易受多源扰动的特点,及航空遥感拍摄的高精度稳定要求,提出一种ESO_LQR复合控制方法。该方法可实时估计系统的状态信息,并且可将内外扰动进行自动补偿,解决LQR对不确定系统控制能力差的问题,提高机载云台系统的控制品质。

(1)
1 机载三轴增稳云台的数学模型
机载三轴增稳云台结构如图1所示,其结构主要包括基座、外框架、中框架与内框架。
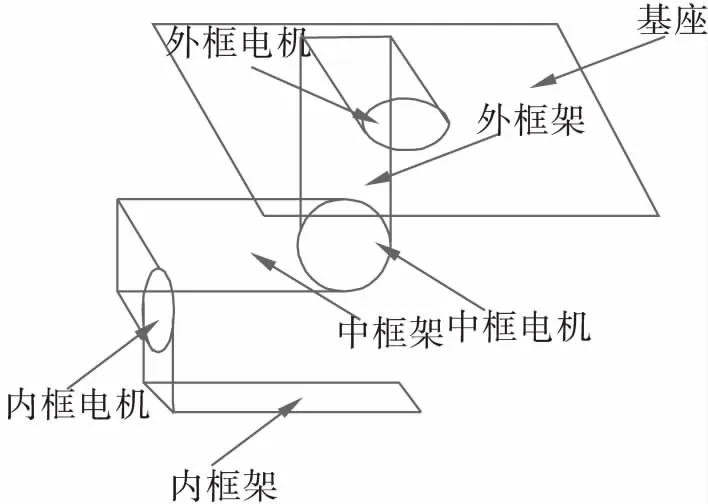
图1 三轴增稳云台结构图
基座与内框架上通常安装姿态传感元件,每个框架都有一个电机控制框架的旋转角,应用三个框架电机可对力矩干扰进行抑制,达到使云台相机对准目标的目的[6]。
为方便研究三轴云台的机体建模与控制方法,可作如下假设:
(1)三轴云台为刚体,框架及框架间无形变;
(2)相机焦点与三轴云台三框架转动轴始终交于一点;
(3)三轴云台各框架结构装配精确,无质量不平衡力矩产生。
三轴云台的运动主要为姿态运动,不同于多旋翼无人机建模只需要机体坐标系B(XYZ)与惯性坐标系G(XYZ)两个相对坐标系,建立三轴云台的数学模型还需要云台基座坐标系S(XYZ)用来参考。云台相机在惯性坐标系G中的姿态角表示为[φb,θb,ψb]T,云台基座在惯性坐标系S中的姿态角表示为[φs,θs,ψs]T,基于Z-X-Y顺序构建欧拉角可得到通用的旋转变换矩阵如式(1)所示。
三轴云台在工作时,拥有因无人机机动造成的外部扰动与各框架运动造成的内部运动耦合,根据牛顿-欧拉动力学方程可建立云台各框架运动方程为
(2)
根据直流电机原理,云台各框架电机存在如式(3)所示的机电关系。
(3)
刚体的角运动存在如下关系:

(4)
设x1=φ、x2=ω、x3=i,可通过式(3)、(4)得到电机系统的状态空间表达式:
(5)
2 LQR控制器原理
LQR理论是建立在状态反馈的基础之上,其本质是为原系统设计一个状态反馈控制器。状态反馈是将系统的每一个状态变量乘以相应的反馈系数,再传递到输入端形成的控制律,作为被控系统的控制输入。经典的LQR控制器结构原理如图2所示。

图2 LQR控制器结构原理
当系统能控,根据最优理论,选取性能指标函数:
(6)
(7)
将u=-Kx代入到性能指标函数中可得到
(8)
应用黎卡提(Riccati)方程ATP+PA+Q-PBR-1BTP=0的对称正定解P构建K=R-1BTP,即可构建李雅普诺夫函数
(9)

K=lqr(A,B,Q,R)
(10)
其中Q为状态变量在系统工作中的权重,R为控制器输出在系统中的权重。
3 扩张状态观测器原理
传统LQR控制器依赖被控对象精确的系统模型,但实际中系统模型存在许多未知部分,LQR控制的精度往往无法达到理想的效果。而自抗扰控制器(ADRC)可以很好地处理非线性系统问题,该控制方法的核心为应用扩张状态观测器(ESO)观测系统总扰动,并针对总扰动对系统进行补偿,可以有效提高系统对外部扰动与自身内扰等不确定因素的抑制能力[7],ESO的核心思想是对扰动进行观测,并对扰动进行抑制以将被控系统线性化,转化为简单的积分串联型系统方便控制[8]。
针对单输入、单输出的非线性时变(m-1)阶系统为
(11)
式中f(x1,x2,…,xm-1,w(t),t)为系统受控制器与扰动作用的动态,其可以是非线性的、时变的。
将未知部分f(x1,x2,…,xm-1,w(t),t)扩张为新的状态量
(12)
则扩张后的系统状态应表示为
(13)
(14)
式中fal(e,α,δ)结构为:
(15)
式(14)中β为非线性观测器参数,α、δ为函数fal的非线性参数。δ与fal函数的斜率成反比;α决定函数的形状,起类反比例增益的作用[9]。

当系统状态对系统的影响部分已知时,可将已知参数的状态量从扩张状态中提取出来,写入扩张状态观测器中[14],减小扩张状态观测器的工作量,从而更精准地观测未知扰动。
通过不断调整观测器的参数使观测器达到良好的观测效果,在此观测效果下提取扩张状态观测量zm,基于该状态构建扰动抑制控制器[15]。
4 ESO_LQR复合控制器设计
根据三轴增稳云台的数学模型可知,云台电机转角与云台相机的姿态角不成线性关系,由于云台基座与内框架都安装有姿态传感器,可通过对云台各框架机构的局部控制实现云台系统的整体控制,即将云台相机在惯性坐标系内的姿态控制转换为在云台基座坐标系内的姿态控制。根据欧拉角定义,刚体的姿态都对应唯一的旋转矩阵,于是可以得到云台相机在基座坐标系下的旋转矩阵:
(16)

图3 ESO_LQR复合控制结构原理图

4.1 LQR控制器设计
(17)
4.2 ESO_LQR复合控制方法
根据云台的数学模型,云台的LQR控制是一种局部控制,其在云台内部无耦合力矩扰动的情况下可对偏航角做较好的跟踪控制,但是当无人机机动时,三轴云台若想实时跟踪目标,通常需要三个通道同时对其各自的期望角进行追踪,这不可避免地产生云台内部耦合力矩。在LQR控制中,系统原有的各状态量可以通过姿态传感器进行采集,而云台内部的耦合力矩通常很难进行直接测量,应用ESO可以较好地估计这种扰动,根据式(17)建立包含耦合角加速度的偏航通道的状态空间表达式为
(18)
将式中f扩张为新的状态变量x4,记作:
(19)
扩张后的状态空间表达式为:
(20)
对这个线性系统建立状态观测器ESO:
(21)
当选取合适的观测器参数使ESO很好地拟合近似系统各个状态时,根据式(3)、(21)可得到抑制云台偏航通道总扰动的补偿控制律uf=-JRz4/Kt。
最后将LQR控制律与ESO得到的补偿控制律相结合,即可得到云台的实时控制量u=u0+u1+uf。
5 仿真及分析
为验证ESO_LQR复合控制方法在机载三轴云台系统中的有效性,使用仿真软件搭建三轴云台模型。电流项与误差角速率项易受各种高频噪声的影响,导致系统可靠性变差,故LQR控制器中这两项应降低权重,LQR的参数设置为:

ESO的参数设置为:β1=200,β2=1.33×104,β3=2.5×105,β4=2.184×106,δ=0.01,α1=0.1,α2=0.05,α3=0.01。
现以偏航角为研究对象,系统的姿态角控制器分别采用经典LQR控制器与ESO_LQR复合控制器进行实验对比,将无人机飞行日志中的姿态数据导入到云台系统模型中,设定俯仰期望角与横滚期望角为0°,偏航期望角信号为10°,观察ESO_LQR复合控制方法对多源扰动的抑制能力。仿真实验过程中认为无人机不受云台耦合力矩影响,仿真时间为60 s。
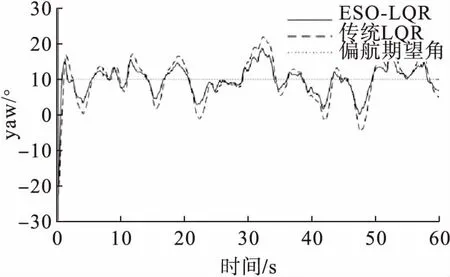
图4 两种控制策略的姿态跟踪对比图
图4为ESO_LQR与LQR的姿态跟踪对比图,通过对比姿态跟踪效果可以发现,同样工作条件下,ESO_LQR控制器对机身扰动及内部耦合有很好的抑制效果。ESO_LQR控制器的控制效果的均方根误差(RMSE)为4.213 3°,而LQR控制器的均方根误差为6.000 6°,前者较后者提高了29.7%,说明文章提出的控制方法可以很好地抑制三轴云台受到的多源扰动。
6 结论
本文设计了ESO_LQR复合控制方法用于机载三轴增稳云台控制,通过实时获取被控对象模型中的内扰与外扰并加以补偿。仿真分析表明,应用ESO_LQR复合控制方法有助于提高控制系统的抗干扰性,增强了鲁棒性,验证了本文提出方法的可行性。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
上海师范大学学报·自然科学版(2022年3期)2022-07-11
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年7期)2021-08-13
摄影之友(影像视觉)(2020年2期)2021-01-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
影像视觉(2020年2期)2020-03-19
电子制作(2019年23期)2019-02-23
摄影之友(影像视觉)(2017年11期)2017-11-27
