一种低配硬件资源的雷达目标点迹提取凝聚方法
2021-03-18 02:09邢永昌
雷达与对抗 2021年4期
邢永昌,洪 伟,孙 斌
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
当前目标点迹提取和凝聚主要有两种方法:
一种是通过FPGA或DSP等芯片中的逻辑软件实现点迹提取,计算机实现点迹凝聚与滤波跟踪。该方法的特点是提取波门内点迹,点迹组成往往只包含方位、距离和方位延伸值等基本信息。其优点是可以通过逻辑软件实现大规模数据处理的要求,只发送少部分数据给计算机,计算机集中资源用于目标的凝聚、跟踪,可以释放大量计算机资源用于人机交互和接口控制,能够简化雷达数据处理和显示控制硬件架构,节约实现成本;缺点是点迹凝聚精度不高,原因是计算机没有实时接收大规模点迹数据的接口,点迹提取芯片不能进行复杂的逻辑处理,因此往往利用点迹处理芯片进行简单的逻辑处理,把基本的目标点迹数据发送给计算机,计算机收到有限的点迹数据,只能采用几何中心等方法进行凝聚分裂并获取目标点迹中心,该方法仅适用于硬件配置低且对目标精度要求不高的情况。
另一种是通过高速通道(如Rapid IO等)把整个雷达视频数据发送给计算机,由专用的计算机(一个或多个)实现目标的点迹提取,然后送给专用计算机进行目标凝聚、目标跟踪和显示控制。由于点迹提取过程处理数据量大,且要求实时性高,需要占用大量计算机资源,故该处理过程需要专用的计算机(往往需要多台)用于点迹提取;目标凝聚和目标跟踪处理也需要专用的计算机。该方法的优点是点迹提取精度比较高,由于目标点迹提取的输出目标点迹信息数据精细,目标凝聚可以进行高精度处理;缺点是需要多个与逻辑芯片之间的高速接口的计算机系统,该架构系统的硬件架构复杂,因此硬件成本和研制成本相对第一种方法均大幅提高。
本文以上述两种方法为基础:基于第一种方法的硬件基础,通过改进点迹提取算法和目标凝聚算法,能够输出接近甚至等同于第二种方法可实现的目标跟踪精度。点迹提取逻辑芯片仅需增加输出每个点的幅度信息,在目标凝聚算法中采用质心法来获取目标的位置信息和时间信息。该方法在数据传输上增加的数据量为原来的一倍,完全可以实现第一种方案的硬、软件架构。测试验证环境:在点迹提取芯片与计算机之间采用PCI总线;计算机硬件配置:单核CPU,主频2.2 GHz;运行软件包含的功能:目标凝聚、跟踪;雷达显示控制;雷达操控与故障检测;雷达对外接口等。
1 实现原理
本文提供一种低配硬件资源的雷达目标点迹处理方法,该方法在点迹提取、输出格式设计、点迹凝聚过程中进行算法改进,即可达到以较低的成本获取较高精度的目标航迹信息的效果;在保证目标点迹精度的前提下,提取范围要小、输出数据要少、点迹凝聚的计算量要小。本方案实现步骤如下:
(1)点迹提取
针对每个脉冲回波数据,采用M-N检测器,对同一个仰角层、相同距离相邻脉冲视频数据进行方位上滑窗提取。
针对每一个距离单元进行门限过滤处理,脉冲数据过门限则开始记录当前脉冲的幅度值,如果记录到第(N-M+2)个时,没有出现第2个过门限值,则放弃记录;当记录数据量超过N时,查看是否满足M/N点迹起始条件(不低于M/N),如果没有满足,则从第二个过门限点开始记录数据,并丢弃前面记录的数据;如果满足,则结束条件(低于M/N),方位延伸值从第一个记录的超出门限值开始计算,到满足结束标志为止;满足结束条件后,判断是否满足方位延伸值≥T(T值一般取一个波束宽度对应点目标主触发个数的一半),如果满足,则判断该起始与结束数据之间为一个完整点迹。判断该点迹的位置是否在需要输出的区域(以下称为波门)中,如果在波门中,存入目标点迹寄存器,用于待输出;如果不在,则清除该数据,并继续准备下一个点迹的判断。如果超过波门内最大点迹的个数,且已检测区域小于2/3波门区域(为了保证波门中心区域点迹能够获得提取,必须保证检测区域不小于2/3波门区域),则继续提取点迹,并从第一个点迹开始覆盖。具体处理流程如图1所示。
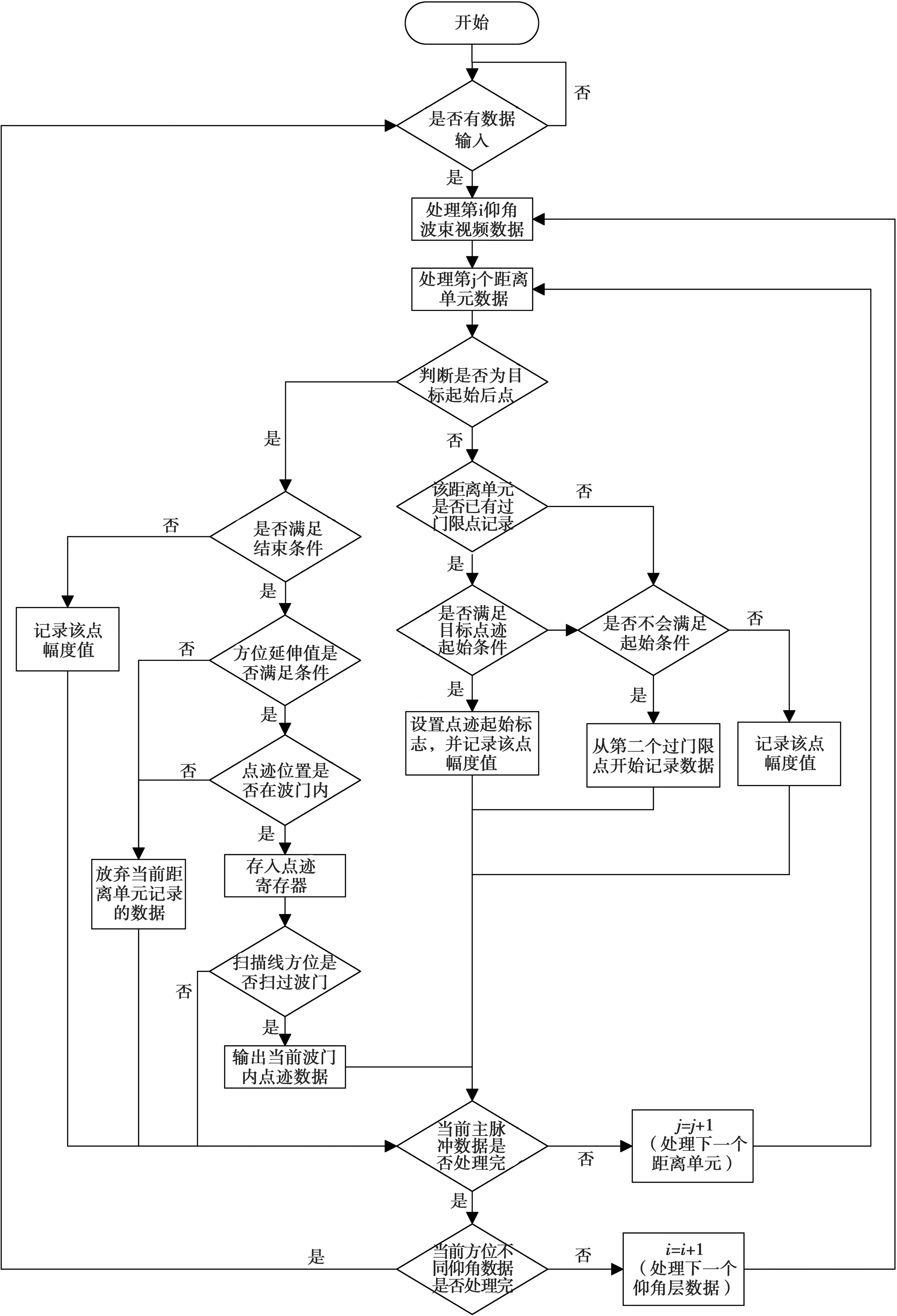
图1 点迹提取流程图
(2)点迹输出
输出波门内目标点迹数据到计算机系统,包括当前波门号;所处仰角值;波门内的点迹个数;第n1个点迹的方位、距离、方位延伸值;第m个距离单元幅度值等,具体如表1所示。
(3)目标点迹凝聚
计算机根据收到的目标点迹信息(含有方位、距离、仰角、延伸值和方位延伸值对应点的幅度信息),采用式(1)~(5)可以分别计算出方位幅度和、距离幅度和、仰角幅度和,通过式(6)~(9)可以分别计算出获取目标的位置质心。
根据目标点的位置质心和点迹延伸值连接性进行凝聚处理,点迹凝聚后根据组成目标的每个点迹对应的数据分别累加,获取凝聚后目标点对应的幅度和、方位幅度和、距离幅度和、仰角幅度和。通过式(6)计算出天线扫过目标位置中心时刻的时戳质量中心。
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
式(1)~(9)的均值针对某一个点迹,其中PAA为方位幅度和;PDA为距离幅度和;PEA为仰角幅度和;PTA为时间幅度和;PA为幅度和;Ampi为方位上第i点的幅度值;Disi为第i点的距离值;Elei为第i点仰角值;A为方位质心点值;D为距离质心点值;E为仰角质心点值;T0为第0点的时戳值;TAN为天线扫描一个周期的时间;P0为第0点的方位值;T为时戳质心点值。
2 实现过程
实施步骤如下:
首先通过逻辑软件实现点迹提取,计算机实现目标凝聚和检测跟踪的硬件环境,硬件环境逻辑图如图2所示。

图2 硬件环境逻辑图
采用M-N检测器,根据实现原理中描述的具体方法划窗提取点迹。方法的验证试验采用M=4,N=7(下文关于该取值仅指在该试验中的取值)。针对每一个距离单元进行门限过滤处理,有脉冲数据过门限,则开始记录当前脉冲的幅度值,如果记录到第5个没有出现第2个过门限值,则放弃记录;当记录数据量超过7时,查看是否满足4/7点迹起始条件,若不满足,则从第2个过门限点开始记录数据,并丢弃前面记录的数据;如果满足结束条件(低于4/7),方位延伸值从第1个记录的超出门限值开始计算,直到满足结束标志为止;满足结束条件后,判断方位延伸值是否大于等于5,如果满足,则判断该起始与结束数据之间为一个完整的点迹。判断该点迹的位置是否在需要输出的区域(波门)中,如果在波门中,则存入目标点迹寄存器,用于待输出;如果不是,则清除该数据,并继续准备下一个点迹的判断。具体处理流程如图3所示。
将波门内目标点迹数据输出到计算机系统,点迹输出数据的内容和格式见表1;采用第1章描述的方法计算获取目标的位置质心。
根据目标点的位置质心和点迹延伸值连接性进行凝聚处理,点迹凝聚后根据组成目标的每个点迹对应的数据分别累加,获取凝聚后目标点迹对应的幅度和、方位幅度和、距离幅度和、仰角幅度和。采用式(6)~(9)可以计算获取目标点迹参数的质量中心。
计算机根据收到的目标点迹信息(方位、距离、仰角、延伸值、点的幅度信息),通过计算幅度和、方位幅度和、距离幅度和、仰角幅度和计算获取目标的质量中心。具体计算公式如式(1)~(5)。
凝聚后目标点迹信息发送至目标跟踪单元、显示单元等,进行目标的外推和外推点迹信息显示等。
3 实验验证
采用真实雷达目标回波进行测试后发现,当目标中心位置偏离几何中心时,该方法效果明显。同样的雷达回波分别采用几何中心法和本文质心法的测试结果表明,目标的位置中心和时戳中心精度均得到明显提高。
采用本文方法和传统方法提取得到的目标测量位置中心和时戳中心分别如图4和图5所示,其中白色十字标志是根据逻辑软件输出的波门内点迹数据提取的目标位置。

图4 采用本文方法提取的点迹位置图
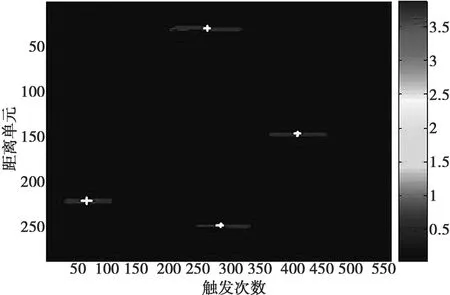
图5 采用传统方法获取的目标位置图
4 结束语
随着数据处理芯片中RAM容量的提高,逻辑软件可以存储更多的处理数据,这为利用硬件实现波门内点迹提取软件和实现目标凝聚的方法提供了提高精度的必要条件。在该硬件条件下,本文方法在硬件简化基础上实现了目标测量精度的提高,是一种低成本的雷达目标测量精度提高方法。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
初中生世界·九年级(2020年2期)2020-04-10
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
科技视界(2016年15期)2016-06-30
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16
红领巾·成长(2009年8期)2009-01-12