基于图像处理的雾滴粒径检测方法
2021-03-17 06:43:58刘思瑶田素博李天来
沈阳农业大学学报 2021年1期
郭 娜,刘思瑶,须 晖,田素博,李天来
(1.沈阳农业大学a.园艺学院/设施园艺省部共建教育部重点实验室,b.工程学院,沈阳110161;2.中国农业大学 工学院,北京100083)
农药的减施增效问题是我国农业生产中亟待解决的问题。为发挥农药的最佳防治效果,农药雾滴必须均匀适量的分布在植物叶片等靶标上,因此植保机械的作业质量是决定防治病虫害效果的重要因素[1-3]。 植保机械的作业质量以雾滴在靶标上的沉积分布、雾滴粒径来衡量。农药雾滴粒径是影响农药在靶标上沉积分布的主要因素,已有研究表明细小雾滴更易均匀附着在靶标上,但易随风飘移且不易沉积,增加雾滴粒径虽然抗飘移但容易从靶标上流失,造成农药沉积到土壤而形成污染,且雾滴数目成倍减少[4-6]。另外,20 世纪70 年代提出的生物最佳粒径理论认为不同的生物靶标所能捕获的雾滴粒径范围不同,不同靶标只有在最佳粒径范围内才能捕获最多的雾滴,取得最佳的防治效果[4,7-8]。 因此,农药雾滴粒径的检测对指导植保机械高效施药,提升农药有效利用率有着重要意义。
目前,雾滴粒径检测方法主要采用光学法直接测量或雾滴收集测量。 光学法直接测量仪器主要包括基于激光衍射技术的激光粒度仪、基于图像分析技术的粒子图像分析仪等[1],该方法直接对空中漂浮的雾滴进行非接触测量,测量精度高,粒径范围广,但体积庞大,操作复杂,成本高,无法用于田间作业中雾滴粒径检测[9-13]。雾滴收集测量法通过油盘、采集卡等收集雾滴,使雾滴保持球形或撞击采集卡形成斑痕,再通过显微镜人工测量或计算机图像处理算法得到雾滴粒径[14-17]。 其中,水敏试纸是最常用的雾滴收集材料,其本色为黄色,雾滴沉积后显色为蓝色,且操作简单、成本低,被广泛应用于植保机械田间雾化性能检测中,国内外学者对水敏试纸的图像处理算法进行了深入的研究,但多集中在对雾滴覆盖率、雾滴密度等性能参数的分析[18-24],缺乏对雾滴粒径的检测算法研究。 因此,基于水敏试纸的雾滴粒径图像检测算法研究能够为田间快速检测雾滴粒径提供便利,实现植保机械喷头雾化效果的及时反馈,以便于快速改善喷雾作业质量,提高农药有效利用率。
目前,雾滴粒径的图像检测算法多采用雾滴区域面积或周长直接推导出雾滴粒径[17],该方法适用于油盘采集的雾滴,雾滴边缘轮廓较清晰,但水敏试纸上雾滴斑痕粘连严重,形状不规整,且雾滴在试纸上存在扩散,导致雾滴粒径识别误差较大。 为解决上述问题,本研究在已有研究基础上[19],搭建了水敏试纸图像采集与处理系统,提取显色的雾滴区域后将粘连雾滴进行循环分割,采用Huber 损失函数对分割得到的单个雾滴斑痕轮廓进行拟圆,进而求取斑痕直径,并试验得到雾滴斑痕直径与真实粒径的校正方程,提高雾滴粒径的检测精度,实现雾滴粒径的快速检测。
1 材料与方法
1.1 水敏试纸图像采集与处理系统
水敏试纸图像采集与处理系统主要由计算机、载物台、相机、镜头、光源及光源控制器组成(图1)。 相机为水星系列MER-125-30UC 彩色CCD, 分辨率为1292×964pixels,像素尺寸为3.75μm×3.75μm,并选用焦距为16mm 的M1214-MP2 镜头,调整镜头与载物台的垂直距离为350mm。光源选用白色环形LED,直接套装在镜头上,其亮度可由光源控制器调整。图像处理软件选用德国MVTec Software GmbH 公司研发的专业软件HALCON, 该软件可与相机进行通讯实时采集图像进行处理。水敏试纸和标定卡同时放置在载物台上,为避免自然光的影响,载物台及相机等放置在暗箱里,调整光源亮度后,利用HALCON 对水敏试纸进行图像采集及处理。
1.2 相机的标定
为精确测量水敏试纸上雾滴斑痕的真实直径,必须精确获得试纸上的点与图像像素点尺寸之间的转化关系,相机的标定即为寻找该转换关系,从而实现从图像中测量出实际数据的目的。
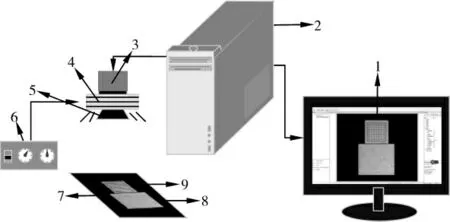
图1 水敏试纸图像采集和处理系统Figure 1 Image acquiring and processing system ofwater sensitive paper
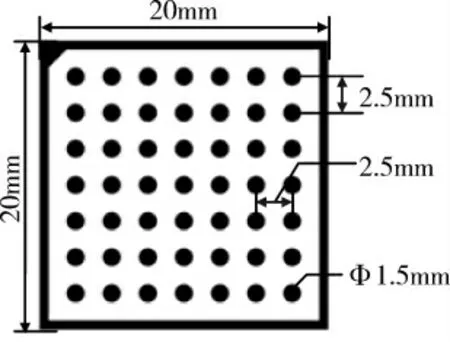
图2 标定板Figure 2 Calibration card
标定板选用30mm×30mm 铝制圆形靶标,标定板在黑色方框内包含7×7 个相同的圆靶(图2)。 与棋盘靶标的角点提取相比,圆心提取算法抗噪能力强,算法简单快速[25]。 本研究采用两步标定方法,首先不考虑畸变利用直接线性变换方法求得相机内外参数的初值,然后考虑镜头畸变因素,利用最优化算法提高标定结果的精度。 利用HALCON 自带的标定助手生成初始标定代码后,根据上述标定原理进行改进,采集15 张不同位置的标定板图像作为样本进行标定。
相机标定后得出了畸变系数(Kappa),焦距(Focus),每个像素代表的宽度与高度(Sx,Sy),图像中心点位置(Cx,Cy),以及图像的尺寸(Width,Height),根据这些参数即可通过后续计算将以雾滴斑痕直径转换为实际的长度。
1.3 雾滴区域提取与粘连分离
在统计水敏试纸上的雾滴斑痕前,需要单独提取出图像中的每个雾滴进行斑痕直径求取。 由于雾滴区域十分微小,且存在雾滴相互粘连情况,因此本研究采用相干增强扩散算法对图像进行增强,提取水敏试纸区域后,将彩色图形分为R、G、B 3 个单通道图像,并选择对比度最强的R 通道进行动态阈值分割,然后采用先腐蚀后膨胀的结构化分割方法对粘连雾滴区域进行循环分割处理,最终得到单个雾滴斑痕区域[19]。
1.4 雾滴区域拟圆算法
经过雾滴区域提取及粘连雾滴分离,即可针对单个雾滴区域求取其斑痕直径。 采用提取雾滴区域的轮廓点后拟合成圆形的方法,以拟合圆直径为雾滴斑痕直径。随着雾滴密度的增加,水敏试纸上雾滴粘连越严重,粘连分割后雾滴斑痕形状不规则,因此在雾滴区域边缘点拟合为圆的过程中,需要考虑异常点的影响。
Huber 算法是一个常用于回归问题的损失函数,其优点是能增强平方误差损失函数对异常点的鲁棒性,因此常用于直线或圆的拟合,其损失函数如式(1),其中y 表示测定值,f(x)表示预测值,δ 表示残差,常规的最小二乘法与Huber 算法拟合时残差与损失的对比如图3。
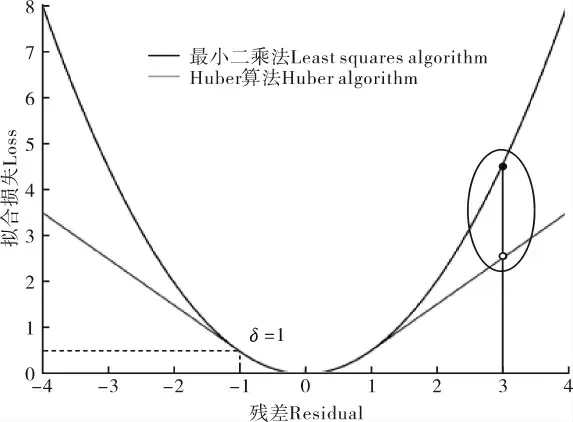
图3 Huber 算法拟合损失曲线Figure 3 Fitting loss curve of Huber

由图3 可知,最小二乘法不论拟合损失有多大,损失函数一直呈二次函数增长,而Huber 算法只有在残差值大于残差阈值δ 时,损失函数才呈线性增长。 以残差阈值δ 取1 时为例,在拟合过程中,若拟合残差为3 时,最小二乘法能够容忍的损失要远高于Huber 算法,即其在拟合中会把更多的异常点当作是参考点进行拟合,这样得到的拟合结果,较损失曲线较低的Huber 算法拟合精度低出很多。 因此,本研究选用基于Huber 算法对雾滴区域轮廓进行拟合。 在应用Huber 算法对雾滴区域轮廓拟合时,首先获取轮廓上所有的点坐标,并将这些点坐标作为待拟合原始数据。 为确定最优的δ 值,随机选取了大量待拟合雾滴区域轮廓点坐标数据样本,根据其损失函数分别进行了当δ=1.0,1.5,2.0,2.5,…,4.5,5.0 时的标准圆方程的拟合试验。 最终得出针对本研究的雾滴区域轮廓拟合,当δ 值为1.5 时拟合效果最佳。Huber 算法的应用能够降低异常点对拟合圆方程的影响,同时又不会丢失重要轮廓点的信息,对雾滴区域拟合结果比较理想。
1.5 雾滴粒径校正方程的求取
将雾滴区域轮廓拟合为圆后,通过标定即可求得图像中雾滴斑痕的直径。 但由于水敏试纸本身有一定的纤维特性,会使得雾滴在接触试纸后存在扩散作用,使得水敏试纸上的雾滴斑痕直径大于液滴实际的大小,但二者之间往往存在对应函数关系。 为了得到雾滴真实粒径,需要对图像处理得到的雾滴斑痕直径进行校正。
为得到雾滴斑痕直径与雾滴真实粒径的校正关系,利用微量进样器向水敏试纸滴加定量液滴。 微量进样器可以提取固定体积的微量液体,通过微量进样器滴加的液滴近似为球体,因此可根据球体体积V 公式,求取滴加液滴的直径作为雾滴真实粒径D:

求取雾滴粒径校正方程的试验方案为:向水敏试纸滴加0.1,0.2,0.3,…,1μL 的定量液滴,每个体积滴加10次,应用上述图像处理算法处理水敏试纸,得到液滴所产生的斑痕直径d,计算10 个雾滴的直径平均值作为该体积液滴对应的雾滴斑痕直径,并以圆点标记在图4中,然后基于最小二乘法原理对数据进行拟合,得到雾滴真实直径与雾滴斑痕直径的校正方程为:

2 雾滴粒径图像检测算法试验验证

图4 雾滴斑痕直径与真实粒径之间关系Figure 4 Relationship between the diameters in the images and the actual diameters of droplets
2.1 雾滴区域拟圆试验
采用普兰迪机电设备公司生产的背负式电动喷雾机(工作压力0.2~0.4MPa,额定电压12V)及杭州美琪公司生产的L334 单孔锥形喷头搭建喷雾系统,以水代替农药,从水敏试纸上方50cm 向下喷洒,喷雾后得到水敏试纸如图5a。 利用水敏试纸图像采集处理系统对图像采集和处理后,结果如图5b,提取出雾滴区域以蓝色表示,拟圆后雾滴用黑色圆形表示,图5c 为水敏试纸方框部分进行局部放大后的处理结果。由图5b 可知试纸上的雾滴斑痕被准确提取出来,粘连雾滴被准确分割,经过图像处理后该水敏试纸共识别到679 个雾滴,与人工计数相同。 由图5c 可知,对于边缘较规整的雾滴,拟合后的圆形与其外轮廓基本吻合,方框中2 个和3 个雾滴粘连区域被准确分割后拟合成圆形,拟合结果较准确,且位置信息未发生变动。 因此拟合后结果可以为后续雾滴粒径分布特性的分析做好准备,图5 试纸中其最大粒径为746.7μm,最小粒径为52.6μm,VMD 为369.907μm,NMD 为267.422μm。
2.2 对比试验分析
常用的雾滴粒径参数是体积中值粒径(volume middle diameter,VMD)与数量中值粒径(number medium diameter,NMD),将所有雾滴按体积从小到大顺序排列,中间的雾滴粒径即为NMD,而从小到大累加所有雾滴体积,当体积累加值为全部雾滴体积的50%时,所对应的雾滴粒径即为VMD。为验证基于水敏试纸的雾滴粒径图像识别的可行性和有效性,利用最常用的激光粒径仪进行雾滴粒径识别与雾滴粒径图像识别方法进行对比试验,考虑上述2 个参数来衡量雾滴粒径图像识别算法的效果。选用济南Winner 分体式激光粒度仪,该仪器选用米氏散射和Fraunhoff 衍射理论对其镜头前雾滴粒径进行测量统计,测量精度高,能够实现较大范围的雾滴粒径测量;喷嘴采用TEEJET 公司生产的110015 喷嘴;分体式激光粒度仪的检测中心距离喷嘴0.3m,为了使激光粒度仪检测的雾滴群体与水敏试纸承接的雾滴群体大致相似,喷雾系统压力稳定后激光粒度仪开始采集数据,同时水敏试纸在喷头下0.5m 模拟靶标手持以稳定速度通过激光粒度仪检测区域。 此试验分别在喷雾压力为0.2,0.3,0.4MPa 的工况下进行雾滴粒径测量,每个工况下分别进行10 次重复试验,分别统计两种检测方法的VMD 和NMD,以10 次试验的均值作为该压力下的雾滴粒径参数进行对比。
由表1 可知,随着喷雾压力的增加,两种检测方法所检测到的VMD 和NMD 随压力变化的趋势基本一致,即增大喷雾压力会使雾滴粒径更小。 以激光粒度仪检测结果为基准,图像检测方法的VMD 检测相对误差分别为0.2%、4.5%和2.0%,NMD 检测相对误差分别为12.3%、13.7%和7.7%。 两种方法都是对检测到的雾滴进行统计分析得到的VMD 和NMD,因其统计的雾滴无法完全相同,必然存在检测误差。 但雾滴粒径图像检测方法能基本反映雾滴粒径的变化趋势,尤其是VMD 的最大检测相对误差为4.5%。 因此,利用水敏试纸图像进行田间雾滴粒径检测切实可行,能够反映作业中喷头雾化效果和雾滴粒径范围,为提升喷雾作业质量提供参考。

图5 雾滴图像拟合为圆形的结果Figure 5 Result of fitting the droplets regions into circles

表1 不同喷雾压力下的雾滴粒径检测结果Table 1 Detection results under different pressure
3 结论
本试验对利用水敏试纸图像进行田间雾滴粒径检测方法进行了研究,应用Huber 算法对雾滴轮廓进行拟圆后作为雾滴斑痕直径,并利用校正方程获取雾滴真实粒径,结果证明该方法是可行的,能够用于田间雾滴粒径的快速测量,对指导植保作业参数的调节、提高农药利用率具有一定的指导意义。 但雾滴斑痕拟圆算法和粒径校正方程精度有待于进一步改进,以提高雾滴粒径检测精度,且雾滴粒径图像检测方法的衡量方法也有待优化,以便更好地评价雾滴粒径检测精度。
猜你喜欢
小学生学习指导(高年级)(2021年10期)2021-11-02 05:32:20
汽车维修与保养(2020年11期)2020-06-09 05:42:16
保健与生活(2020年2期)2020-02-11 13:09:34
云南档案(2019年7期)2019-08-06 03:40:50
妇女之友(2017年7期)2017-10-24 19:12:13
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
中老年健康(2016年4期)2016-05-04 10:49:04
山西大同大学学报(自然科学版)(2015年2期)2015-01-22 07:15:13
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38