
公路隧道施工监控量测方法对比研究
2021-03-17 09:47:56刘熙媛孙岳东徐东强杨小明宋宜祥
中外公路 2021年1期
刘熙媛,孙岳东,徐东强,杨小明,宋宜祥
(河北工业大学 土木与交通学院,天津市 300401)
1 引言
在现代公路建设中,为了克服高程障碍,缩短线路里程,减小坡度和曲率,广泛采用修建隧道的方式穿越山岭地区,因此公路隧道已经成为不可或缺的重要交通基础设施。在隧道施工过程中,隧道变形是衡量隧道结构体系稳定性的重要指标,监控量测是保证隧道现场施工安全和实现信息化施工的有效手段。随着长大公路隧道的数量不断增长,施工过程中遇到的水文地质条件也越来越复杂,为了及时反馈设计,指导施工,加强监控量测工作十分重要。
在JTG F60-2009《公路隧道施工技术规范》规定的必测项目中,拱顶下沉采用精密水准仪量测,周边位移采用收敛计量测,量测精度都要求达到0.1 mm。这种接触式量测方法即为传统的监控量测方法。该方法成本低廉,操作简便,精度很高,但是在实际操作中发现,该方法易干扰施工进度,阻断隧道交通,且部分复杂情况下无法正常进行监测工作,存在着很大的局限性。因此,传统的接触式量测方法难以继续在长大复杂的现代公路隧道中发挥作用。
利用全站仪进行非接触式量测是新型的监控量测方法,目前已经在不少隧道工程中得到了应用。利用全站仪量测拱顶下沉和周边位移的监测方法也在DB34 T1087-2009《公路隧道施工非接触量测规程》中得到确认。虽采用先进的全站仪测量会使成本升高,但与传统的监控量测方法相比,该方法操作安全快速,对施工进度影响小,精度高,具有显著的优越性。
利用全站仪进行非接触式量测的方法主要分为对边量测和三维坐标量测两类。王利晨认为对边量测的方法可以监测到隧道拱顶下沉和周边位移的变化,和传统量测有一致的变化趋势;LUO Yanbin等研究表明采用对边量测来量测隧道变形的精度能达到1 mm;袁恒等给出了基于全站仪三维自由设站的非接触隧道监控量测方法,其量测精度也能达到1 mm;史晓萍等认为三维坐标量测能测出测点在某统一坐标系下的三维坐标,在公路隧道施工监测中有着广泛的应用前景;WANG Huiying等通过非接触式全站仪三维变形量测和有限元数值分析,对某隧道坍塌区域支撑结构的稳定性和力学特性进行分析,避免了发生进一步坍塌,确保了隧道安全;范本等对利用测量机器人在隧道施工中实现远程自动变形监测进行了研究,但需要编写专门的程序,且投入较大,维护不易,不利于推广。目前各种监控量测方法的精度很难达到公路规范要求,针对各种监控量测方法的对比没有涉及多测回三维坐标量测。因此,为了让监控量测工作更好地在公路隧道施工过程中发挥预警和指导作用,保证隧道施工的安全,有必要对监测方法进行深入的对比研究,找出满足量测精度要求的公路隧道施工监控量测方法。
2 工程概况
延崇高速公路杏林堡隧道地处河北省北部山区,区内地形起伏较大,沟壑发育。地质勘探结果显示,隧道区岩性以安山岩为主,蚀变构造明显。隧道洞身围岩级别为Ⅲ~Ⅴ级,围岩整体性较差,变化频繁。隧道设计标准为上、下行独立双洞四车道分离式隧道。隧道支护采用复合式衬砌结构。隧道进口段施工方法为上下台阶预留核心土法,采用机器开挖。
3 隧道变形监测仪器及方法
研究采用TM50全站仪作为监测仪器。该设备是一款专用于变形监测的精密测量机器人。与其他全站仪相比,该仪器的突出优势是:① 测量精度高,测角精度达0.5″,棱镜测距精度达±(0.6 mm+1 ppm),反射片测距精度达±(1 mm+1 ppm);② 采用压电陶瓷驱动,不需任何齿轮,电能直接转换为机械能,快速平稳噪声小;③ 防护等级为IP65,能胜任隧道中恶劣环境下的作业。
由于监测所需棱镜价格昂贵,在恶劣的公路隧道施工环境中容易破损,且不方便安装和拆卸,故实际监测中采用40 mm×40 mm徕卡反射片作为照准目标。监测基准点布置在已相对稳定的仰拱或二衬的拱腰上。监测时全站仪架设于隧道中线位置。由于隧道照明条件很差,且常有烟尘水雾,因此监测时需要使用强光手电筒辅助照明,便于照准。
鉴于全站仪非接触式量测一般采用对边量测和三维坐标量测两类监测方法,结合该研究采用的监测仪器性能状况,监测过程中对比的全站仪监测方法有对边量测及手动、自动和人工辅助瞄准多测回三维坐标量测4种监测方法。
对边量测原理如图1所示。为了测定E、F两点的高差hEF与斜距SEF,在与E、F两点均通视的点P架设全站仪,观测得到斜距SPE、SPF,竖直角α1、α2,水平角β。利用三角高程原理和三角余弦定理可得E、F两点的平距DEF、高差hEF、斜距SEF。相邻两日的高差和斜距变化值即为一日内的拱顶下沉值和周边位移值。对边量测只进行半测回测量就可以得到结果,效率很高,但易受人为因素、机器因素和隧道内复杂环境影响,引起较大误差。
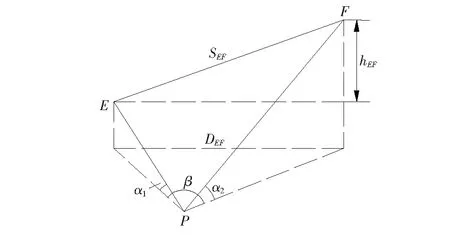
图1 对边量测原理图
三维坐标量测原理如图2所示。设定X轴平行于隧道中线方向,正向为隧道施工方向,Y轴垂直于隧道中线方向,Z轴垂直于地面竖直向上,建立局部左手直角坐标系。为了测定E、F两点的高差hEF与斜距SEF,在与E、F两点均通视的点P架设全站仪,观测得到斜距SPE、SPF,竖直角α1、α2,方位角β1、β2。根据观测数据可以计算得到E、F两点在该坐标系中的三维坐标,进一步可得高差hEF与斜距SEF。进行多测回测量的目的是为了减小误差,提高量测精度。
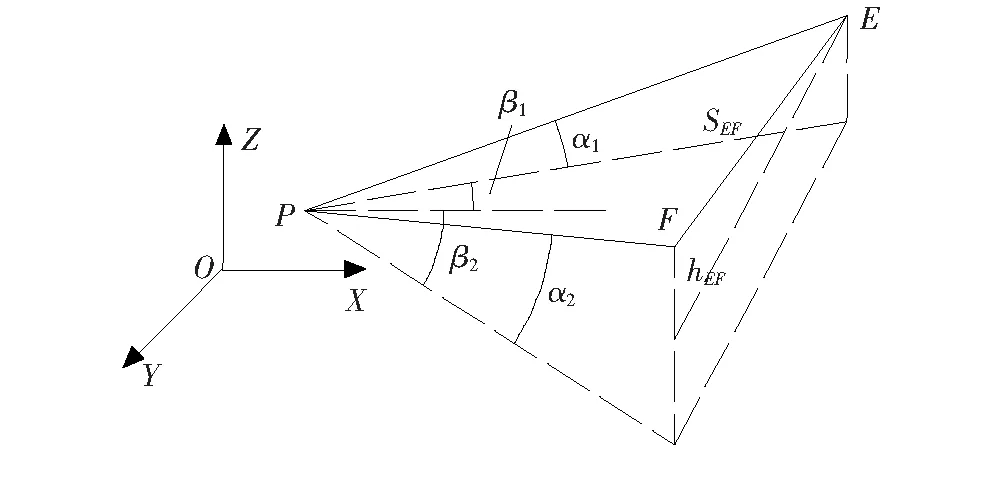
图2 三维坐标量测原理图
手动多测回三维坐标量测即采用手动方式进行多测回的三维坐标量测,该方法量测速度较慢,比较耗费时间。
自动多测回三维坐标量测即利用全站仪的自动目标识别与照准技术进行多测回的三维坐标量测。该方法自动化程度高,量测速度快,但由于照准目标为反射片而不是棱镜,且隧道施工现场多有烟尘水雾,环境恶劣,易受干扰,无法达到最好的监测效果。
人工辅助瞄准多测回三维坐标量测是在自动多测回三维坐标量测的基础上改进的监测方法。进行多测回测量时,测量机器人自动搜索定位于测点后,进一步人工照准而不是自动照准,使全站仪十字丝中心准确定位于测点反射片十字中心,点击测量后测量机器人自动搜索定位于下一测点,依次循环,其余步骤与自动多测回三维坐标量测相同。该方法由机器人找点,提高测量效率,由人工照准,确保量测精度,实现了人机协同工作,同时兼顾了测量机器人的智能性与人的灵活性,避免了自动三维坐标量测在隧道环境中的技术缺陷,且量测速度较快。
4 4种监测方法的理论量测精度估算
由于对边量测监测原理与其他方法不同,单独进行精度估算;其他3种监测方法监测原理相同,统一用三维坐标量测进行精度估算。
4.1 对边量测理论量测精度估算
(1) 高差理论量测精度估算
根据图1原理,利用误差传播定律可得高差hEF的中误差mhEF计算公式为:
(1)
式中:mSPE、mSPF、mα1、mα2分别为斜距SPE、SPF和竖直角α1、α2的中误差;ρ为常数,取206 265″。
假定监测基准点与全站仪镜头处于同一水平面上,即α1≈0°,则sinα1≈0,cosα1≈1;TM50全站仪的反射片测距精度为±(1 mm+1 ppm),在隧道监控量测中,全站仪观测半径远小于100 m,比例误差记为0.1 mm,则一测回的测距中误差为1.1 mm,半测回的测距中误差mSPE=mSPF≈±1.56 mm;该全站仪的测角精度为0.5″,则一测回的方向中误差为0.5″,一测回的测角中误差为0.71″,半测回的测角中误差mα1=mα2=±1″;全站仪距离监测基准点约50 m,即SPE≈50 m;隧道拱顶与路面高差约8 m,假定全站仪架设高度为1.5 m,则隧道拱顶与全站仪镜头高差为6.5 m。当全站仪距离监测断面30、40、50 m时,即SPF≈30、40、50 m时,竖直角α2分别为13°、9°、7°,代入式(1)得高差的中误差为mhEF=±(0.5、0.4、0.4) mm。
(2) 斜距理论量测精度估算
根据图1原理,假定周边位移两测点处于同一竖直断面,且与全站仪大致处于同一水平面,则两点的斜距与平距相等,评定斜距的精度可转化为评定平距的精度。利用误差传播定律可得平距DEF的中误差mDEF计算公式为:
(2)
式中:mSPE、mSPF、mβ分别为斜距SPE、SPF、水平角β的中误差。
同理mSPE=mSPF≈±1.56 mm,mβ=±1″;假定周边位移两测点的平距DEF约等于隧道最大宽度13 m,当全站仪距离监测断面30、40、50 m,即SPE=SPF≈30、40、50 m时,水平角β分别为25°、19°、15°,代入式(2)得斜距的中误差为mSEF=mDEF=±(0.5、0.4、0.4) mm。
4.2 三维坐标量测理论量测精度估算
(1) 高差理论量测精度估算
根据图2原理,利用误差传播定律可得高差hEF的中误差mhEF计算公式为:
(3)
式中:mSPE、mSPF、mα1、mα2分别为斜距SPE、SPF和竖直角α1、α2的中误差。
定义一测回的测距中误差为m1,则n测回的测距中误差mn为:
(4)
n测回的测角中误差、方向中误差计算方法与此类似。
与对边量测假定条件相同,当测回数为1~5个时,代入式(3)得高差中误差mhEF结果如表1所示。
(2) 斜距理论量测精度估算
根据图2原理,与对边量测假定条件相同,即测点坐标XE=XF、ZE=ZF,则两测点的斜距即为Y坐标差值。利用误差传播定律可得斜距SEF的中误差mSEF计算公式:
(5)
式中:mSPE、mSPF、mβ1、mβ2分别为斜距SPE、SPF和方位角β1、β2的中误差。
设DEF≈13 m,SPE=SPF≈30、40、50 m时,分别有β1=β2≈13°、9°、7°。当测回数为1~5时,代入公式(5)得斜距中误差mSEF结果如表2所示。

表1 三维坐标量测高差理论量测精度估算
由以上理论精度估算可知,使用对边量测的理论量测精度达不到规范要求;当全站仪距离监测断面为40 m时,使用多测回三维坐标量测分别量测拱顶下沉、周边位移4个测回,理论量测精度即可达到规范要求,考虑到估算过程进行了部分条件简化,实际监测中采用5测回三维坐标量测可满足规范要求。
5 4种监测方法的对比分析
对比试验在杏林堡隧道已完成二衬施工的区段进行。测点布置情况与隧道施工实际监测断面类似。由于该区段二衬施工已完成较长时间,短期内沉降变形可以忽略,可将隧道周壁上的3个测点视为坐标固定点。全站仪距离监测断面约40 m,距离监测基准点约50 m。在相同条件下,分别使用上述4种监测方法对测点进行5次监测,其中3种多测回三维坐标量测方法的测回数均为5个。
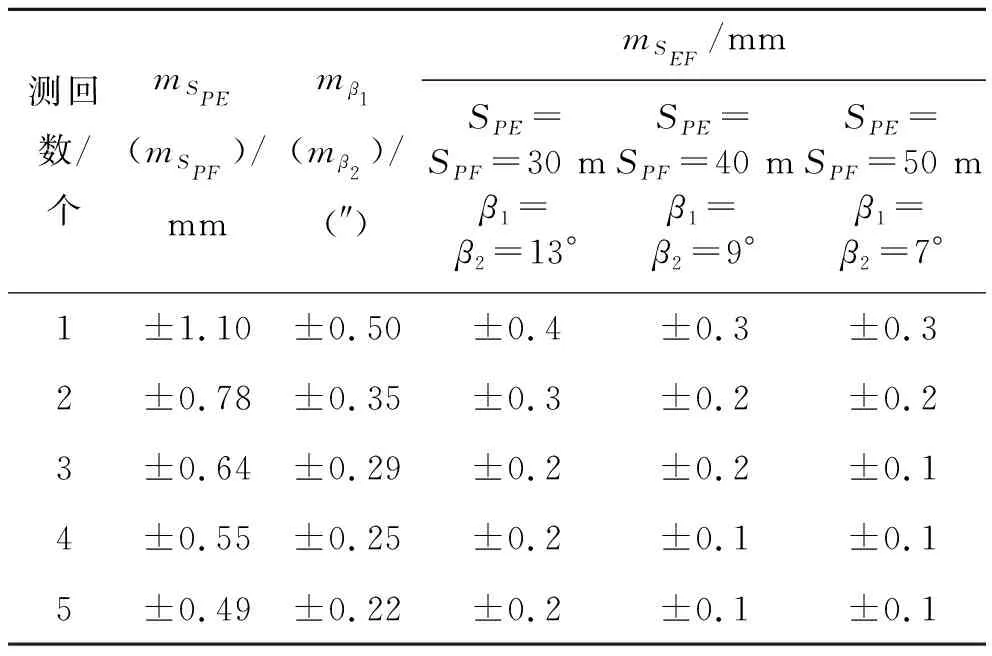
表2 三维坐标量测斜距理论量测精度估算
4种监测方法的监测数据如表3~5所示。监测方法1、2、3、4分别代表对边量测、手动、自动及人工辅助瞄准多测回三维坐标量测。
从实际量测精度看,手动和人工辅助瞄准多测回三维坐标量测的精度符合理论估算结果预期,且达到规范要求的0.1 mm,另外两种监测方法的精度没有达到规范要求。

表3 高差统计

表4 斜距统计

表5 监测用时统计
从监测用时看,对同一断面进行监测时,人工辅助瞄准多测回三维坐标量测用时为10 min左右,对边量测与自动多测回三维坐标量测用时为10 min以内,手动多测回三维坐标量测用时为20 min以上,人工辅助瞄准多测回三维坐标量测的量测速度较快。
综上所述,人工辅助瞄准多测回三维坐标量测是上述4种监测方法中精度最高、同时速度比较快的监测方法,且能够达到现行规范要求的量测精度。
6 实际监测时态曲线
在杏林堡隧道进口段ZK28+668断面使用人工辅助瞄准多测回三维坐标量测方法进行了连续监测,直到变形趋于稳定为止,为期29 d。该断面围岩级别为Ⅴ级。根据监测数据绘制的拱顶下沉与周边位移时态曲线如图3、4所示。

图3 ZK28+668拱顶下沉时态曲线
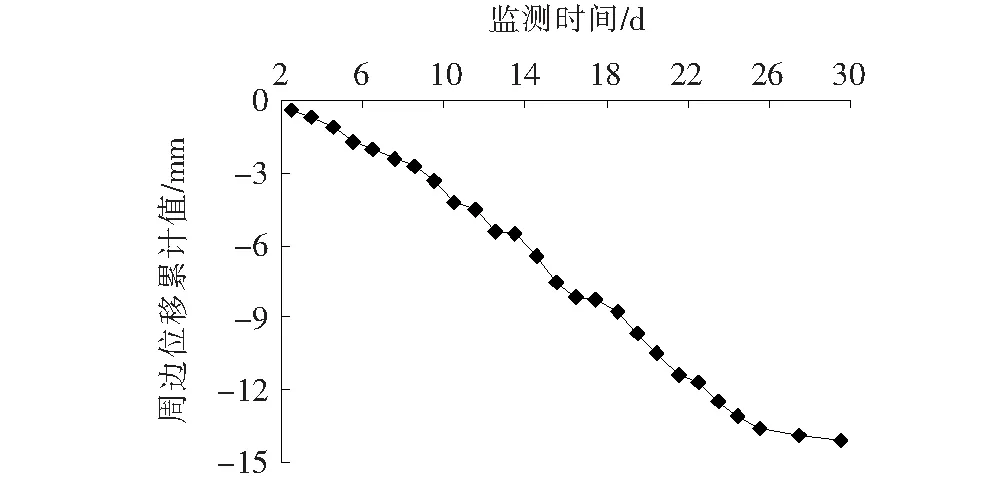
图4 ZK28+668周边位移时态曲线
由图3、4可以看到:使用人工辅助瞄准多测回三维坐标量测方法可以监测到拱顶下沉与周边位移变化值从大逐渐变小、曲线逐渐趋于平缓的过程,准确反映了隧道施工过程中围岩变形趋势,有效保证了隧道施工安全。
7 结语
经过理论估算和现场试验,在该项目对比研究的4种监测方法中,人工辅助瞄准与手动多测回三维坐标量测方法的量测精度能达到0.1 mm,其中人工辅助瞄准多测回三维坐标量测的量测速度更快。
人工辅助瞄准多测回三维坐标量测避免了自动三维坐标量测在隧道环境中的技术缺陷,同时多测回测量时无需人工找点,只需在全站仪照准测点后进行微调以精确瞄准,省时省力,实现了精确快速的非接触式量测,能够达到相关规范的量测精度要求,可以在公路隧道施工监控量测中替代传统接触量测,值得推广使用。
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
电力勘测设计(2022年2期)2022-03-08 09:54:52
汽车实用技术(2021年10期)2021-06-04 07:51:00
北京测绘(2020年12期)2020-12-29 01:37:18
中国惯性技术学报(2019年5期)2020-01-07 08:17:50
工程与建设(2019年3期)2019-10-10 01:40:18
测绘通报(2017年2期)2017-03-07 09:58:46
电测与仪表(2016年9期)2016-04-12 00:29:52
浙江大学学报(工学版)(2015年12期)2015-07-11 10:10:22
水利水电科技进展(2014年1期)2014-10-17 02:29:14
