
Stewart次镜调整平台空间包络判定算法研究
2021-03-16 06:37:24谭爽梁凤超鄢南兴林喆康建兵
航天返回与遥感 2021年1期
谭爽 梁凤超 鄢南兴 林喆 康建兵
Stewart次镜调整平台空间包络判定算法研究
谭爽 梁凤超 鄢南兴 林喆 康建兵
(北京空间机电研究所,北京 100094)
由于空间遥感相机受体积、质量和制造成本的限制,Stewart次镜调整平台需要在任意运动时刻不超出给定的包络尺寸,急需一种解决相机次镜平台空间运动约束的包络判定算法。文章根据结构参数建立了Stewart次镜调整平台运动模型,利用三角函数关系并考虑支杆长度的约束,推导模型中平移与旋转的极限位置,然后给出空间包络的判定方法。将该判定模型应用于某空间遥感相机的Stewart次镜调整平台实例中,运用解析法可快速计算出极限位置,节约了大量时间;运用数值法可进一步精确求出在有支杆长度约束时的极限位置,解析法和数值法结果均满足包络尺寸的要求,表明该包络判定算法适用于六自由度并联机构的空间包络判定。
六自由度并联机构 空间包络 包络模型 次镜调整 空间相机
0 引言
空间光学遥感器在轨应用时,由于受到发射力学环境、在轨重力场和温度场等因素的影响,载荷部组件易产生相对位姿失配和面形误差,导致光学载荷的探测性能偏离原有设计、系统探测性能和成像品质严重衰减[1-3]。由于遥感器的次镜质量小、灵敏度高,可通过调整次镜多自由度位姿来矫正相对位姿失配,从而减小甚至消除初级像差(球差、彗差、像散、场曲),理论和实践均已表明,这是调整代价较小且调整效果最佳的方式[4-7]。在工程实现方面,国内外均普遍采用Stewart平台来调整次镜的位姿,从而实现六自由度高精度位姿调整,其中最具有代表性的是美国詹姆斯韦伯太空望远镜[8-11]。
某高分辨率空间光学遥感器,选择Stewart平台作为次镜位姿调整平台,进行次镜位姿的在轨实时调整,使光学探测系统的主次镜位姿关系回归至理想状态,从而满足系统高分辨率成像的需求。实际上Stewart平台主要应用于机床、飞行器仿真、医学以及精密定位等领域[12-15],这些应用对Stewart平台空间尺寸的约束要求不高。而在航天领域,由于卫星与载荷在满足性能与功能的同时,需要考虑每个分系统的尺寸在工作时不能超出规定的界限,再加上质量与制造成本的限制,因此分解Stewart次镜调整平台,总体会给出包络尺寸的约束,即要求Stewart次镜调整平台在位姿调整的任何时刻,机构的任何边缘均不超过总体给出的包络尺寸。考虑到实际情况,六自由度并联机构是一个立体模型,动平台具有一定的厚度,在旋转时若不考虑周全,很可能导致机构的边缘超出包络尺寸。因此,急需一种解决空间相机次镜平台空间约束的空间包络判定算法。
本文给出了判定Stewart次镜调整平台在运动过程中任意时刻是否超出包络尺寸的判断算法。在运动学反解的基础上,对动平台表面圆周上的点进行坐标分析,建立六自由度并联机构运动模型,并给出模型极限位置的定义,运用解析法和数值法分别推导出模型极限位置并给出空间包络的判定方法。解析法结果简单,快速给出极限位置,节约了大量的仿真时间;数值解用于有其他约束时进一步精确求出极限位置,但非常耗费时间。该判定方法适用于判断Stewart次镜调整平台是否超出给定的包络尺寸,可以避免卫星空间的浪费,从而降低成本。
1 六自由度并联机构动平台运动模型
在进行空间光学遥感器的总体设计中,需综合考虑相机体积、质量和制造成本,对各个有效载荷均有空间约束。通过系统分解,给定次镜调整机构的空间约束为直径、高D的圆柱体,Stewart次镜调整机构在运动过程中,要求不能超出这一圆柱体的包络范围。
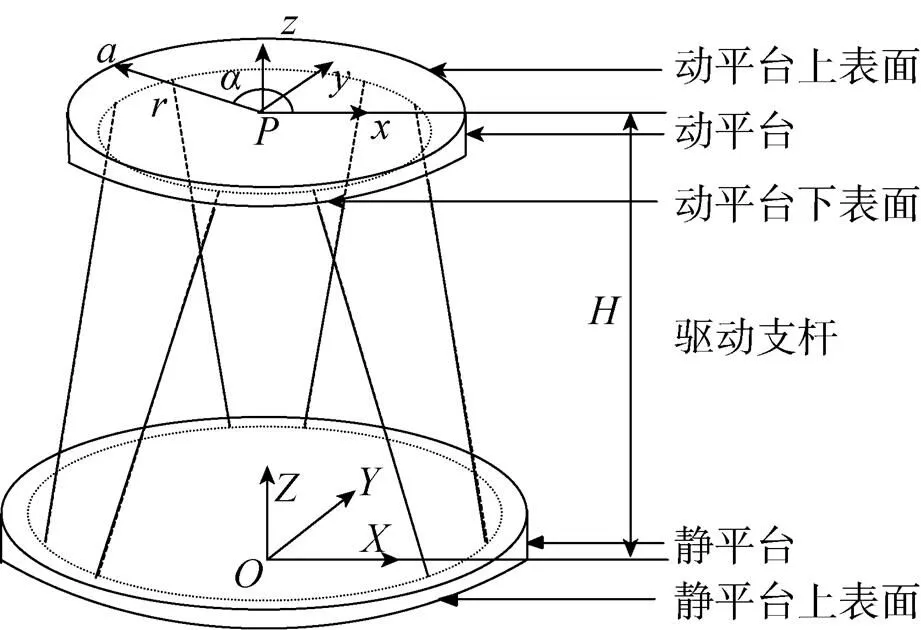
图1 Stewart六自由度并联机构

由动平台向惯性参考坐标系投影,可得表示上平台姿态的方向余弦阵[21],即

式中为动坐标系绕轴转动的角度;为动坐标系绕轴转动的角度;为动坐标系绕轴转动的角度。
-动坐标系中的任何向量p都可以通过坐标变化变换为-静坐标系中的向量,转换公 式为

式(2)为六自由度并联机构动平台上、下表面圆周上点的运动学模型,点的运动轨迹由间距为h的上下两个圆在空间经过平移与旋转形成。因此式(2)可以用于判断并联机构是否满足包络尺寸要求。
为后续推导方便,记

2 六自由度并联机构极限位置与空间包络判定方法
2.1 极限位置

为便于推导,记动平台运动范围为

2.1.1 解析法
对式(3)利用解析法求点每一坐标绝对值的最值,即极限位置。由于六自由度并联机构关于、轴对称,且平台位于正方向,所以只需要分别求出x、y和z的最大值即可。
(1)平移运动极限位置坐标
当动平台进行平移运动时,动平台在、、轴上的坐标值满足

所以,点平移运动极限位置坐标为

(2)旋转运动极限位置坐标
1)r的最大值
根据三角函数关系,当h=−时,可得旋转运动沿方向的极限位置坐标为

2)r的最大值

通过求导分析,当h=−时,可得旋转运动沿方向的极限位置坐标,即

3)r的最大值
显而易见,在旋转过程中,r最大值出现在动平台上表面。因此,式(3)中r为

综合平移和旋转两种运动,可得到六自由度并联机构极限位置模型为
2.1.2 数值法
解析法适用于快速简单判定极限位置,若给出其他约束条件,使满足约束条件时的工作空间一步缩小,无法一下得到极限位置,则需要通过数值法进行计算。下面以支杆约束为例介绍数值法的具体工作流程。


2.2 空间包络判定算法
仅当所有的极限位置都在包络空间范围内,才能够判定六自由度并联机构满足包络尺寸要求。即六自由度并联机构的空间包络判定模型为
式(6)成立,才能得到六自由度并联机构在运动范围运动时均在包络尺寸内的结论。
当有约束条件时,要剔除不满足约束的位姿,所以求解出来的极限位置应该不超过没有约束时对应的极限位置。因此可先利用解析法求出给定位姿的极限位置(e,e,e),若满足式(6),则有无约束,都可以直接给出六自由度并联机构在包络尺寸内;若不满足式(6),则利用数值法求出有约束条件时的极限位置e、e和e,然后判断极限位置是否满足式(6)。若满足,则整个机构在运动过程中满足包络尺寸要求。
3 仿真实例
某相机Stewart次镜位姿调整平台的结构参数、运动范围与包络尺寸参数如表1所示。杆长约束:6个支杆长度均在[130,150]mm。
表1 次镜位姿调整平台机构结构参数与约束参数

Tab.1 The structural parameters and the constraint conditions of the secondary mirror adjustment mechanism

利用MATLAB编程,应用数值算法求出在支杆长度约束下,当∆,∆,∆均取0.1mm,∆,∆,∆均取0.1°,∆取0.001°时,该六自由度并联机构的极限位置坐标为:e=122mm,e=122mm,e=143.7mm。各项结果均满足式(6)要求。
因此,在给定支杆约束时动平台的所有极限位置都在包络范围内,即该次镜位姿调整平台六自由度并联机构在运动范围内所有可达的点均在直径350mm、高150mm的圆柱体包络范围内,满足技术指标要求。
4 结论
针对空间光学遥感器对Stewart次镜调整机构的空间约束要求,根据六自由度并联机构结构参数与运动范围等参数,建立六自由度并联机构动平台的运动模型,给出了该模型极限位置判定的解析算法与约束条件下的数值算法,并完整地给出了六自由度并联机构空间包络判定算法,所得结论如下:
1)解析算法建模过程清晰、公式简单、计算量小,但包络空间大,包含一些无效状态。适用于简单快速计算没有约束限制情况下六自由度并联机构是否满足包络尺寸要求。
2)数值法过程繁琐,计算代价大,但在有约束时,包含的轨迹更接近真实状态,因此适用于精确计算各个约束下六自由度并联机构是否满足包络尺寸要求。
3)可先利用解析法快速求出极限位置,若满足包络尺寸要求,不用再计算有约束时的极限位置,直接给出六自由度并联机构满足包络尺寸的结论。
在某空间遥感器Stewart次镜调整平台的设计中,运用解析与数值方法,判定所研制的Stewart次镜调整平台极限位置严格处于总体给定的包络尺寸内,为后续相关应用提供了参考。
[1] 温正方, 张景旭, 张丽敏. 五自由度次镜调整机构的研究[J]. 工程设计学报, 2010, 17(6): 473-478. WEN Zhengfang, ZHANG Jingxu, ZHANG Limin. Research of Five-degree-of-freedom Adjustment Mechanism for Secondary Mirror[J]. Journal of Engineering Design, 2010, 17(6): 473-478. (in Chinese)
[2] 武锡铜. 高精度六自由度并联平台控制系统设计[D]. 合肥:中国科学技术大学, 2018: 1-3. WU Xitong. Control System Design of High Precision 6-DOF Parallel Platform[D]. Hefei: University of Science and Technology of China, 2018: 1-3. (in Chinese)
[3] 王瀚, 曹小涛, 赵伟国, 等. 空间相机次镜调整机构的改进布谷鸟标定方法[J]. 红外与激光工程, 2018, 47(5): 1-8. WANG Han, CAO Xiaotao, ZHAO Weiguo, et al. Improved Cuckoo Calibration Method of Space Telescope Secondary Mirror Adjusting Mechanism[J]. Infrared and Laser Engineering, 2018, 47(5): 1-8. (in Chinese)
[4] YANG Dehua, CHENG Ying, WU Changcheng, et al. A Novel Hexapod and Its Prototype for Secondary Mirror Alignment in Telescopes[J]. Research in Astronomy and Astrophysics, 2018, 18(9): 1-10.
[5] SCHIPANI P, PERROTTA F, MOLFESE C, et al. The VST Secondary Mirror Support System[C]//Advanced Optical and Mechanical Technologies in Telescopes And Instrumentation. USA: SPIE, 2008: 701845: 1-10.
[6] 王茫茫, 刘兆军, 李博. 空间相机次镜在轨校正仿真分析[J]. 航天返回与遥感, 2018, 39(2): 73-83. WANG Mangmang, LIU Zhaojun, LI Bo. Simulation Analysis of On-orbit Alignment for the Space Camera Secondary Mirror[J]. Spacecraft Recovery & Remote Sensing, 2018, 39(2): 73-83. (in Chinese)
[7] 姚蕊, 李庆伟, 孙京海, 等. FAST望远镜馈源舱精度分析研究[J]. 机械工程学报, 2017, 53(17): 36-42. YAO Rui, LI Qingwei, SUN Jinghai, et al. Accuracy Analysis on Focus Cabin of FAST[J]. Journal of Mechanical Engineering, 2017, 53(17): 36-42. (in Chinese)
[8] WOLF E M, GALLAGHER B B, SCOTT KNIGHT J, et al. JWST Mirror and Actuator Performance at Cryo-vacuum [C]//Space Telescopes and Instrumentation 2018: Optical, Infrared, and Millimeter Wave. USA: SPIE, 2018, 1069808: 1-14.
[9] FEINBERG L, BOLCAR M, KNIGHT S, et al. Ultra-stable Segmented Telescope Sensing and Control Architecture[C]// UV/Optical/IR Space Telescopes and Instruments: Innovative Technologies and Concepts VIII. USA: SPIE, 2017, 10398: 1-9.
[10] TOULEMONT Y, PASSVOGEL T, PILBRATT G L, et al. The 3.5m all SiC Telescope for HERSCHEL[C]//The International Society for Optical Engineering. USA: SPIE, 2004, 5487: 1119-1128.
[11] PIRNAY O, MARCHIORI G, YEILYAPRAK C, et al. DAG 4m Telescope: Assembly, Integration and Testing[C]// Ground-based and Airborne Telescopes VII. USA: SPIE, 2018, 9906: 990662, 1-14.
[12] 马光, 周万勇, 汪杰, 等. 六自由度并联平台多轴运动控制系统设计[J]. 机床与液压, 2020, 48(5): 1-5. MA Guang, ZHOU Wanyong, WANG Jie, et al. Design of Multi-axis Motion Control System for 6-DOF Parallel Platform[J]. Machine Tool & Hydraulics, 2020, 48(5): 1-5. (in Chinese)
[13] 张朴真, 杨建中, 从强, 等. 六自由度微振动模拟平台动力学分析[J]. 航天器工程, 2016, 25(2): 19-25. ZHANG Puzhen, YANG Jianzhong, CONG Qiang, et al. Dynamic Analysis of a 6-DOF Micro-vibration Simulation Platform[J]. Spacecraft Engineering, 2016, 25(2): 19-25. (in Chinese)
[14] 唐天梅. 基于空间并联机构的六维放射治疗床[J]. 医疗装备, 2018, 31(9): 36-37. TANG Tianmei. Research of 6 DOF Radiation Treatment Bed Based on Spatial Parallel Mechanism[J]. Chinese Journal of Medical Device, 2018, 31(9): 36-37. (in Chinese)
[15] CAO X, ZHAO W, ZHAO H, et al. 6-PSS Precision Positioning Stewart Platform for the Space Telescope Adjustment Mechanism[C]// 2018 IEEE International Conference on Mechatronics and Automation (ICMA), 2018: 487-492.
[16] TANG Z Y, MA H, PEI Z C, et al. A New Numerical Method for Stewart Platform Forward Kinematics[C]// Chinese Control Conference, 2016: 6311-6316.
[17] TANG J, CAO D Q,YU T H. Decentralized Vibration Control of a Voice Coil Motor-based Stewart Parallel Mechanism: Simulation and Experiments[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019, 233(1): 132-145.
[18] 侯立果, 王丹, 安大卫, 等. 多维力加载装置动力学建模及加载试验[J]. 北京航空航天大学学报, 2018, 44(5): 1095-1101. HOU Liguo, WANG Dan, AN Dawei, et al. Dynamic Modeling and Loading Experiment of Multi-dimensional Loading Device[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(5): 1095-1101. (in Chinese)
[19] JIAO J, WU Y, YU K P, et al. Dynamic Modeling and Experimental Analyses of Stewart Platform with Flexible Hinges[J]. Journal of Vibration and Control, 2019, 25(1): 151-171.
[20] MIUNSKE T, PRADPTA J, SAWODNY O. Model Predictive Motion Cueing Algorithm for an over Determined Stewart Platform[J]. Journal of Dynamic Systems, Measurement, and Control, 2019, 141(2): 1-9.
[21] 傅邵文. 基于LPV方法的Stewart平台分散控制问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2008: 15. FU Shaowen. Research on Stewart Platform’s Decentralized Control Problems Based on LPV Method[D]. Harbin: Harbin Institute of Technology, 2008: 15. (in Chinese)
Study on the Envelope Space Determination Algorithm of the Stewart Platform in the Secondary Mirror Adjustment
TAN Shuang LIANG Fengchao YAN Nanxing LIN Zhe KANG Jianbing
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Since the space remote sensing camera is limited by size, weight and manufacturing costs, the secondary mirror pose during adjustment by the Stewart platform, must stay within the given envelope space at any time. An envelope space algorithm is urgently needed to judge whether the Stewart platform is within the given envelope space in real time. Considering the thickness of the moving platform, a kinematics model was firstly built up on the basis of the structure parameters. The extreme translations and orientations of the model were deduced by trigonometric functions respectively and they were added together to get the Stewart platform extreme positions. With the struts length constraint applied on the model, position coordinates that satisfy the constraint were calculated directly, and then the extreme positions were found to determine the envelope space. At last, with an example of the Stewart platform in a space remote sensing camera, the extreme positions were computed by the model in analytical and numerical methods. Both the results of the two methods satisfied the given envelope space. In practice, the analytical method can compute the extreme positions rapidly and efficiently, and the numerical method can have more accurate solutions than the analytical one. The envelope space determination algorithm is suitable for the envelope space judgment of the 6-DOF (6-degree-of-freedom) parallel mechanism.
Stewart platform; space envelope; envelope model; secondary mirror; space camera
TP 24
A
1009-8518(2021)01-0108-07
10.3969/j.issn.1009-8518.2021.01.013
谭爽,女,1989年生,2015年获得中国空间技术研究院光学工程硕士学位,工程师。目前主要从事六自由度并联机构设计与控制算法的相关工作。E-mail:tsjlyz@163.com。
2020-05-25
谭爽, 梁凤超, 鄢南兴, 等. Stewart次镜调整平台空间包络判定算法研究[J]. 航天返回与遥感, 2021, 42(1): 108-114.
TAN Shuang, LIANG Fengchao, YAN Nanxing, et al. Study of the Envelope Space Determination Algorithm of the Stewart Platform in the Secondary Mirror Adjustment[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(1): 108-114. (in Chinese)
(编辑:夏淑密)
猜你喜欢
光学精密工程(2022年23期)2023-01-06 14:59:22
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
加油站服务指南(2021年4期)2021-07-21 02:29:22
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
航天返回与遥感(2018年2期)2018-05-17 09:43:32
光学精密工程(2016年5期)2016-11-07 09:06:06
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
人生十六七(2015年6期)2015-02-28 13:08:38
