基于不确定度的飞机运动模型对比分析*
2021-03-16 09:21
舰船电子工程 2021年2期
(中国民航大学电子信息与自动化学院 天津 300300)
1 引言
通常,在国内的众多模型对比研究中,对飞机运动模型性能的判断大多是基于航迹误差进行对比分析。有的仅仅是将一次仿真得到的航迹点数值与测量得到的航迹点数值相减得到航迹点误差进行分析;有的考虑到了一次仿真的偶然性,进行了多次仿真得到多个航迹点误差,然后再通过取平均值的方法得到两个不同模型航迹点误差,从而进行两个模型的对比[1]。这种方法虽然大大地降低了仿真的偶然性,但是却忽略了每次仿真得到的航迹点误差都是有意义的这一事实,每一个航迹点的误差都不能简简单单地通过取平均值的方式所替代。同时,这样的方法也是将连续的航迹离散化,得到的只是航迹误差数值的离散分布,并不能反映出航迹的全局分布状态。所以,在这里,引入测量学中的不确定度的思想,对航迹误差进行更全面的探讨,并通过一种更直观的方式对航迹模型的性能进行分析。
2 不确定度及其在航迹误差中应用
2.1 不确定度的概念
不确定度这个词的意思是不能肯定或有怀疑的程度。在测量学中,测量不确定度与测量结果相关联,用以表征合理赋予被测量的数值分散性的参数[2~3]。其中,误差表示测量结果量值相对于参考量值的偏离值,而测量不确定度是基于误差理论提出和发展的,同时也丰富了误差理论[4]。实际情况中,由于天气,导航精度和模型的不完善,所得到的航迹预测值并不代表飞机的真实位置,而应该是以一定的概率分散在某个区域,在本文中,称为航迹不确定度[5~6]。将不确定度的思想引入飞机运动模型评估中,可以对模型的准确性和稳定性进行分析,从而比较模型预测质量的好坏。
2.2 航迹不确定度计算
首先计算一条航迹的误差不确定度。如图1所示,表示的是一条飞机预测航迹与真实航迹的关系图。从图中我们可以看出,由于受到天气,导航精度,预测模型等影响,使得飞机真实航迹与预测航迹有所出入。
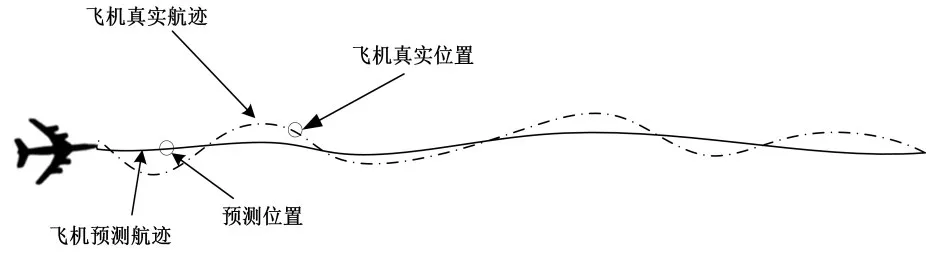
图1 飞机预测航迹与真实航迹
在图1中,实线表示根据预测模型所得到的飞机预测航迹,虚线表示飞机真实航迹。图上的圆点表示飞机在第k个时刻的航迹点。用(λk,φk)表示第k时刻飞机真实的航迹点,用表示第 k时刻飞机预测的航迹点。我们知道,航迹误差的分散程度代表了这条航迹的稳定性能,也就是代表了航迹的不确定度。则根据不确定度原理中的贝塞尔公式[7],可得到一条预测航迹误差的不确定度,公式如式(1)所示,得到了在纬度方向和经度方向上的航迹不确定度:

式(1)中,N表示航迹点的总个数,uλ1,uφ1分别表示第一条预测航迹的纬度方向不确定度和经度方向的不确定度。
则可得到第一条预测航迹的不确定度u1,有

用e1表示第一条预测航迹的航迹误差平均值,有:

我们知道,用运动模型对飞机航迹进行预测,仅简单的进行一次仿真是远远不够的,仿真结果存在着一定的偶然性,所以应该对航迹进行多次预测仿真。
参照一条航迹不确定度的计算公式,则可得到仿真预测M次后,所得到的M条航迹的不确定度和航迹误差均值,分别用u1,u2,…,uM和e1,e2,…,eM表示。
如图2所示,表示的仿真M次后得到的M条预测航迹。图中右边部分标示着每一条预测航迹的航迹误差均值和航迹不确定度。

图2 仿真M次的预测航迹示意图
如果要想得到仿真多次后的航迹不确定度就应该要考虑到每一条航迹的不确定度。
现用u表示经过M次仿真后得到的预测航迹的不确定度,有:

式(5)即为航迹不确定度的公式。
2.3 仿真验证
根据理论推导可知,当所得到的航迹预测误差较大时,说明真实航迹与预测航迹之间相差较大,则所得到的航迹不确定度也较大。
现设置两组误差大小各不相同的航迹数据用来验证不确定度模型的正确性。将误差较小的一组称为航迹1,误差较大的一组称为航迹2。然后分别用传统误差分析方式和基于不确定度的误差分析方式进行比对,所得到的仿真结果如图3所示。

图3 不同航迹误差对比方式
如图3所示,表示的是两种不同的航迹误差对比方式的仿真图。其中,图3(a)表示的是传统的误差对比方式,通过计算多次仿真得到的航迹误差均值;图3(b)表示的是根据本文所推导出的航迹不确定度公式所得到的航迹误差对比图。
从两张图中都可以清楚地看出航迹1的误差是小于航迹2的误差的,这也符合最开始的仿真假设:航迹1的误差小于航迹2的误差。这个仿真结果说明了不确定度模型的正确性,且能够清楚地反映出航迹误差的大小比对情况。此外,通过对比两张图,可以看出,图3(b)所展示的不确定度对比图,与传统误差对比图相比要更加直观一些,同时也弥补了传统误差对比方式中“一刀切”的问题(不考虑不确定度,直接取误差均值)。
3 运动模型对比研究
3.1 运动模型1
运动模型1是由美国联邦航空管理局(FAA)所推荐的航迹预测模型[8]。该模型主要是基于飞机动力学相关知识[9~11]和对地球经纬度的研究所构建的,推导过程如下。
如图4,设飞机在飞行的△t时间内纬度变化角度为△λ。
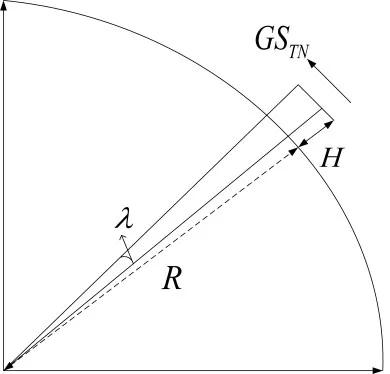
图4 纬度角度变化
根据图4所示的角和边之间的关系,可以得到:

式(6)中R表示地球半径,H表示飞行高度,GSTN表示飞机在正北方向的速度分量。
同时,由图4也可以清楚地看出,当飞行时间△t趋近于0时,那么在该段时间内纬度的变化角度△λ也趋近于0。由高等数学的极限运算公式:当x→0时,sinx/x=1,可得:

对式(7)两边同时求导,可得到单位时间内纬度的变化率λ˙为

接下来,计算飞机在正北方向上的速度分量GSTN,如图5所示,为飞机在飞行中各个角度的关系图示。

图5 飞行角度关系
根据图5可以得:

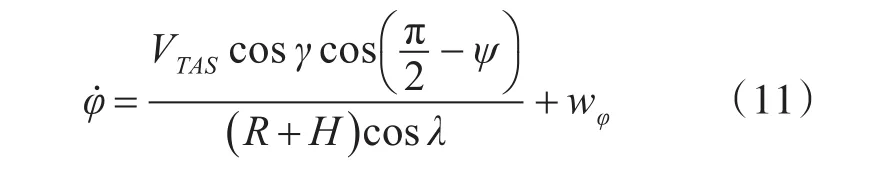
式(9)中,γ,ψ分别表示飞机飞行路径角和航向角;VTAS表示飞机真空速。
联立式(8)和式(9),并考虑到风对飞机速度的干扰等因素,可以得到单位时间纬度的变化率的表达式:

同理可得经度变化率,有
3.2 运动模型2
运动模型2指代的是SIMPLE模型[12],该模型是由McGovern所提出的,主要运用的是微元法的思想,同样也是基于飞机动力学相关知识。
如式(12)所示,首先根据航向角将飞机速度分为正北方向速度和正东方向的速度,有

式中,V表示飞机相对于地面的速度,有V=VTAScosγ;VN,VE分别表示速度在正北方向和正东方向上的分量;ψ表示航向角。
然后,将航线看成是由许多小步长(设时间步长为dt)组成,每一步以恒定的直线距离近似曲线恒定的航向距离,分为正北方向和正东方向,有

式(13)中,dN,dE分别表示在正北方向和正东方向上的步长分量。
将这两个方向上的分量分别除以地球的平均半径R,就得到了飞机的纬度方向和经度方向上的变化率,有

联立式(12)、(13)、(14),并考虑到风,天气等因素的干扰,则可以得到飞机经纬度的变化率,有

其中,经度、纬度与距离的换算公式为

3.3 两种运动模型对比分析
在第2节中,我们推导了航迹不确定度的模型,并通过计算机仿真验证了该模型的正确性,同时通过与传统误差模型比较,也得出该模型的优越性。
接下来将一组抓取自flightradar24真实数据分别代入运动模型1和运动模型2,设置仿真次数M=5000次,并运用不确定度模型来比较,从而对两个运动模型的性能好坏进行评估。
如图6所示,是用两种不同的误差对比方式,对模型1和模型2的性能进行评估的对比结果图。其中图6(a)是通过取多次仿真的误差均值得到的预测误差分布图。从图中我们可以看出两种运动模型在中间都有突然凸起的误差数值,这是因为我们所使用的数据是真实的ADS-B数据,在数据采集过程中可能存在数据间隔较大,数据出现错误的情况,造成了下一时刻的预测航迹出现了一些失误,从而造成预测误差较大的波动。同时,观察图6(a)中两组模型误差对比图,仅仅只能看出来两组预测模型的预测误差的差别不大,具体哪个模型的性能较好,并不是特别直观。

图6 两种误差对比方式比较
接下来,我们观察图6(b),该图是根据所推导的不确定度的公式对两个运动模型性能评估的比较图。图中右上角的数字表示两个模型的不确定度,两条曲线分别表示模型1和模型2的误差分布曲线。从图中可以清楚地看出两个模型的预测误差均在500m左右,同时模型1的不确定度的曲线分布要比模型2的曲线分布更为尖锐,分布曲线越尖锐的图形表示误差分布的分散程度越小,误差分散程度较小从另一方面也说明了模型预测数据的稳定性。那么在对航迹预测数据进行评估时,分散程度越小的数据越具有可靠性,这一点,对于在航迹冲突检测应用中有着重要的意义。
最后,通过分析可以得到两个运动模型的对比结果:模型1的预测航迹效果要优于模型2。
其实,根据3.1节和3.2节两种运动模型的推导公式中也可以看出,模型1不仅考虑到了相对于地球表面飞机飞行的高度H影响,同时也考虑到了飞机纬度对经度变化率的影响作用。所以模型1要比模型2思考问题更为全面,故而在理论上也可以推导得出模型1的预测性能要高于模型2的预测性能。理论推导的结果与仿真实验所得结果相同,从另一个方面也说明了不确定度模型的正确性。
本节通过两种不同的方式对航迹误差进行比较,可以清楚地看出,基于不确定度的误差对比方式不仅比传统的误差对比方式更加直观,同时也考虑到了航迹误差的不确定度因素,并不是简简单单地使用量值表示误差,这样的方式比传统的误差对比方式更加具有科学严谨性。
4 结语
本文通过借鉴测量不确定度的思想,将不确定度原理应用到航迹运动模型对比分析中。将经过多次仿真得到的每一条预测航迹都看作一个整体,最终整合计算建立了航迹不确定度模型,弥补了传统误差分析中忽略其存在不确定度的问题,并且通过计算机仿真验证了模型的正确性。随后,通过将真实航迹数据代入两种不同的运动模型中,并运用传统误差分析方式和基于不确定度的误差分析方式对两个模型进行了对比分析,结果表明:
1)运动模型1的预测性能要优于运动模型2。
2)基于不确定度的误差对比分析方式考虑问题更全面,且能够更加直观、科学地对模型性能进行评估。
猜你喜欢
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
齐鲁周刊(2017年29期)2017-08-08
中学政史地·教学指导版(2016年12期)2017-05-16
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
海峡科学(2013年3期)2013-10-21