
基于拮抗机制的可变刚度流体驱动柔性致动器研究
2021-03-15 08:06:52陈英龙张军豪张增猛弓永军
液压与气动 2021年3期
陈英龙,张军豪,张增猛,弓永军
(大连海事大学 船舶与海洋工程学院,辽宁 大连 116000)
引言
柔性致动器由柔性材料或添加很少的刚性材料制作,具有高度灵活性和复杂环境适应性等优点,近年来引起国内外研究机构和学者的广泛关注,并取得一系列进展,如:由编织网和弹性橡胶制作的气动人工肌肉[1],由形状记忆合金驱动的仿章鱼触手机构[2],裹有电活性聚合物的人工肌肉等[3]。
柔性致动器在实际应用中,不仅要求具备高度的柔性,在特定条件下还需要具备稳定且可控的身形及一定的输出力,因此,可变刚度的柔性致动器具有一定的研究价值。在已有的研究中,使柔性致动器可变刚度的原理主要有两种:第一种是在材料或结构中增加拮抗作用,使机构处于稳定的状态,如:耦合驱动结构、层干扰结构和阻塞原理;第二种通过材料在固、液形态间产生相变实现变刚度,如磁流体[4]。
傅晓云等[5]基于弹簧研制的气动人工肌肉,通过控制气压力来控制刚度。陈煜宇等[6]结合气动人工肌肉技术及纤维堵塞刚度调节机理,设计了一种刚度可调能力的手术操作臂。杨扬等[7]设计了一种变刚度气动肌肉抓手装置,每根肌肉具有4个腔室且外侧设置有纸质拉伸结构,通过该结构实现变刚度。圣安娜高等学校的仿章鱼触手结构[8]采用“横肌”与“纵肌”同时收缩的方式使结构缩紧,机构内产生拮抗作用,实现变刚度,缺点是不能实现刚度和位置的独立控制且效率较低。本研究基于柔性伸长肌和收缩肌的拮抗机制,设计并制作了一种耦合驱动结构的致动器,耦合结构实现变刚度方式是利用冗余驱动,通过形成结构间的拮抗作用,使其处于一种受力平衡、结构稳定的状态,一定程度上实现刚度增加。
流体驱动的柔性致动器通常由硅胶等超弹体作为基体,外层由纤维丝缠绕以提高其强度[9]。本研究所提出的柔性致动器采用冗余流体驱动,具有质量小、设备简单及控制方便等优点,内外复合的伸长肌和收缩肌同时驱动来调节致动器的刚度,两种肌肉的基体由硅胶浇铸成型,外层采用不同材质和结构的具有各向异性的编织物加强,其中,收缩肌采用尼龙材质机织物,具有质量低,纱线间摩擦系数小等优点;伸肌采用新型弹性织物,可显著解决伸肌的轴向膨胀问题。
本研究主要的研究贡献包括以下3点:
(1)利用织物的各项异性设计并制作新型可变刚度的柔性致动器;
(2)建立一种新的柔性致动器的输出力数学模型;
(3)所提出的柔性致动器具有显著地变刚度能力,并可独立于长度进行刚度调节。
1 柔性致动器的设计
基于目前已有的研究成果[10],总结了传统柔性致动器的不足如下:
(1)当收缩致动器充压时,只能收缩和产生收缩力;
(2)当伸长致动器充压时,只能伸长和产生伸长力;
(3)目前还没有单一的柔性致动器可以实现轴向的伸长和收缩;
(4)每种致动器在固定长度时具有固定的刚度值,无法实现变刚度。
针对以上问题,根据收缩致动器和伸长致动器的运动特点,本研究将两种具有各向异性的织物和浇铸成型的硅胶结合,分别设计了伸长肌和收缩肌,最后将两者复合为内外腔结构,定义为伸缩拮抗型流体驱动柔性致动器(Extensor-Contractor Antagonistic Fluid-driven Actuator, ECAFA),当两腔充以不同的压力时可实现变刚度。
致动器的整体设计如图1c所示,外形为圆柱状,底端有2个充气孔,分别用做伸肌和缩肌充压。致动器两端采用扣压的方式进行密封和固定,伸肌和缩肌外层用两种不同功能的织物作为加强层(编织结构如图所示)。对于伸肌和缩肌的基体而言(图1c中剖面深色和剖面浅色部分),应具备较好的拉伸性能和一定的强度,保证在充压时可实现伸长或收缩,同时不被气压充破。硅胶具有天然的柔性且有较好的强度,是作为基体的最佳选择。但是,在硅胶基体浇铸成型后,如果外层不添加任何的限制,伸肌充压后只会膨胀并不伸长,因为基体的侧壁面积大于顶壁面积。为了解决这一问题,许多学者采用双螺旋纤维缠绕在基体外层,可提高基体的输入压力,但双螺旋纤维线间存在间隙,存在着基体不规则膨胀现象,本研究提出使用织物来作为加强层,可有效限制伸肌的膨胀问题,提高伸长效率。
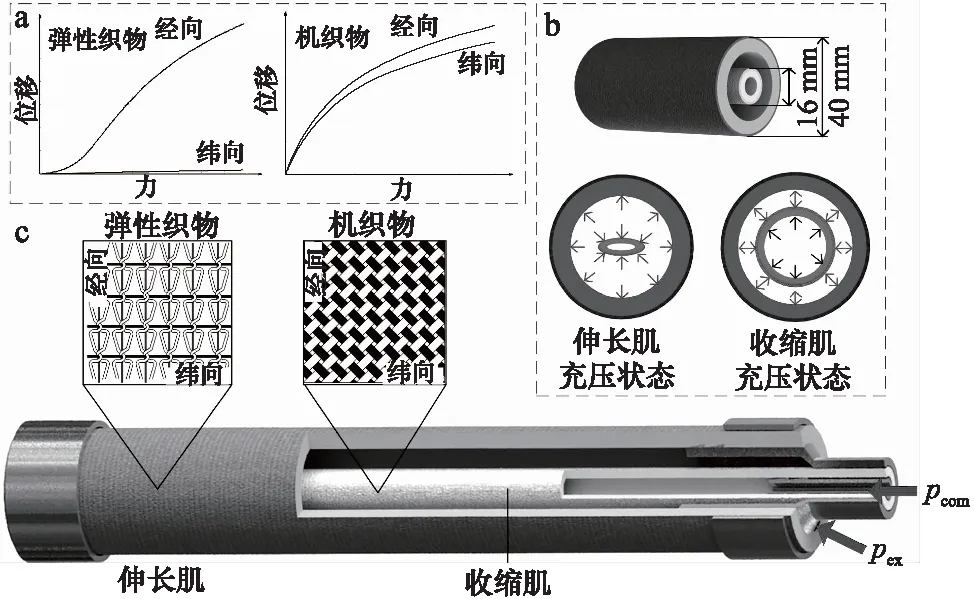
a)织物的各向异性试验 b)尺寸及充压示意图 c)整体剖视图
对于伸长肌的外层织物,在充压下应具有较大的拉伸性能。弹性织物的编织结构可以实现经向最大化的机械形变,同时纬向几乎不会产生形变,在拉力机上做的拉力-位移测试如图1a左图所示,弹性织物具有显著的各向异性。对于收缩肌的外层织物,在充压下应实现径向的较大膨胀,同时轴向应缩短,这样可产生轴向收缩力,与伸长肌产生的伸长力产生拮抗作用。机织物是平行四边形结构,具有结构对称性,受轴向力时会产生各向相似的形变,同样做了拉力-位移试验来测试机织物的性能如图1a右图所示,2个方向的位移不同是因为机织物的初始编织角度不同导致。
当伸长肌充入压力时,致动器伸长并输出推力,此时收缩肌呈被压缩状态,如图1b左下所示;当伸长肌保持一定压力下,收缩肌内部充压不断增加,增加到大于伸长肌内部压力时,致动器缩短并输出拉力,此时致动器会相对地缩短,如图1b右下所示,在这个过程中需保证收缩肌膨胀后的外径小于伸长肌的内径。根据以上设计原则,设计的致动器的尺寸如图1b上图所示。
2 柔性致动器的制作
致动器的制作过程分为4个阶段。在第一个阶段,如图2a所示,为模具准备阶段,使用3D打印的模具和型芯来确定伸长肌基体的外形尺寸(如直径和长度),模具和型芯间使用螺钉固定,存在的缝隙用生料带密封。第二阶段为硅胶调制阶段,硅胶的型号为ELASTOSIL® M 4601,硅胶分为A,B两组分,质量/体积混合比为9∶1,组分B中含有铂催化剂,用于提高组分A硅胶的固化速率。在23 ℃下混合后的密度为1.01 g/cm3,经过真空发生室去除气泡后,缓慢倒入模具中以防止再次产生气泡,混合固化后的抗拉强度为6 N/mm2或5 N/mm2,断裂伸长率为700%,撕裂强度大于30 N/mm,线性收缩率小于0或1%。成型后的伸长肌基体,如图2b所示,外表面的沟槽用作纤维线的缠绕。收缩肌的外表面没有沟槽,和伸长肌相比,模具和型芯的尺寸不同,材料和制备过程相同。第三阶段为了增强伸长肌基体强度和限制径向膨胀,将高强度纤维丝缠绕在伸长肌的外表面,再将弹性织物固定在其外表面。由于弹性织物是片状,所以先包裹住在长肌外表面,再采用点缝的方式将弹性织物做成圆筒状紧紧贴在伸长肌的外表面,如图2c所示。收缩肌不需要缠绕高强度纤维丝,机织物呈圆筒状,直径将收缩肌基体插入机织物中即可。第四阶段为装配阶段,接头分别装在伸长肌和收缩肌的两端,再将收缩肌插入到伸长肌内部,如图2d所示,两端接头使用扣压机压紧,因此伸长肌和收缩肌可保持相对位置不变。最后,用2个不锈钢箍夹紧在装配好的伸长肌两端,如图2e所示,整个致动器制作完成。改进进气口位置后的致动器实物图如图2f所示。
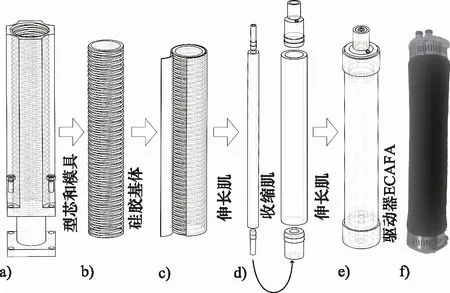
图2 柔性致动器的制作过程
3 柔性致动器的力学特性
柔性致动器的输出力数学模型基于以下假设建立:织物层与硅胶基体之间和织物层的纱线之间不存在摩擦力,以及硅胶基体不存在弹性力。首先,简化致动器的加强织物层和结构如图3a所示,内部的收缩肌可认为是气动人工肌肉(Pneumatic Artificial Muscle,PAM),其编织层可以沿着平行于纵向轴线的线伸展,然后被折叠或拉伸成平整的形状,如图3b所示。扁平的编织层表现得像剪刀机构的镶嵌,可以沿着宽度扩展,同时沿着长度收缩。这种运动对应于径向膨胀和纵向收缩。在没有编织层的情况下,运动将完全由硅胶基体的力学控制。外部的伸长肌织物层可认为是经纬纱垂直交叉结构,其中纬纱是低弹性聚酯纤维,受力时几乎不会变形,而经纱是乳胶丝,具有良好的变形性能。当伸长肌充压拉长时,织物层纱线的变化如图3d所示。
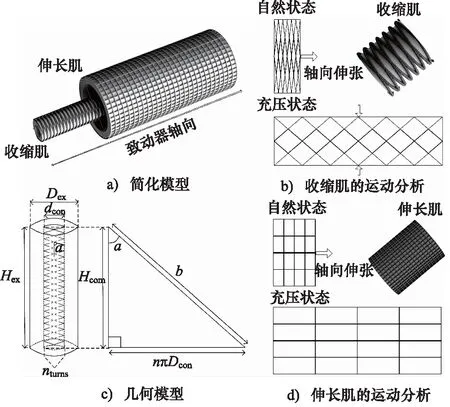
图3 柔性致动器的运动及几何分析
图3c所示的是简化后的致动器几何模型,假定伸长肌和收缩肌为理想的圆柱状,H表示致动器的长度,D和d表示直径,α表示收缩肌外层单股纱线与纵向中心线的夹角,n表示纱线缠绕基体的圈数,b表示单股纱线的长度。
收缩肌的初始长度,直径和体积分别表示如下:
Hcon=b·cosα
(1)
(2)
(3)
其中,下标con代表收缩肌的参数。
伸长肌的初始长度,直径和体积分别表示如下:
Hex=Hcon
(4)
Dex=3Dcon
(5)
(6)
其中,下标ex代表伸长肌的参数。
基于PAM的已有模型,CHOU和HANNAFORD等[11获得的力学模型如下:
(7)
其中,p′为PAM的相对压力。
对于本研究提出的致动器中的收缩肌而言,其内部压力受伸长肌内部压力的影响,比如,较高的伸长肌压力会使收缩肌的相对压力减小,因此,p′可表示为:
p′=pcon-pex
(8)
其中,pcon为收缩肌内部的压力;pex为伸长肌内部的压力。
将式(1)、式(3)和式(8)带入式(7)中,致动器输出的收缩力Fcon可表示如下:
(9)
微分方程(9)用角度α可表示为:
(10)
理论上,伸长肌在充压时不会产生径向膨胀。伸长肌受收缩肌的体积变化影响,收缩肌可认为是沿着伸长肌中心的空心圆柱部分,因此,伸长肌的形状可由1个厚壁圆柱壳来表示,伸长肌的输出力Fex可表示为:
(11)
其中,Vr是相对体积且dVr=dVex-dVcon;Felastic为伸长肌充压时弹性织物的弹力,可用如下公式表示:
(12)
其中,λ是与弹性织物弹力的相关系数;N为弹性织物中乳胶丝的数量;A为单根乳胶丝的横截面积;E为乳胶丝的弹性模量。
将式(12)带入式(11)并化简,可得收缩肌的输出力如下:
(13)
致动器可输出2个方向的力,伸长力或收缩力。
(14)
将式(10)和式(13)带入式(14)中并化简可得致动器的最终输出力F为:
(15)
4 柔性致动器试验验证
4.1 试验系统搭建
柔性致动器实验系统主要包括电路系统和气路系统两部分,如图4a所示,电路系统主要包括微控制器(Arduino Mega 2560)和PWM(Pulse Width Modulation)信号转电压信号模块,其中计算机通过USB端口与微控制器相连并为之提供电源,微控制器输出的PWM信号经模块转换成比例减压阀可识别的电压信号,该模块由12 V电源转换器供电。气路系统主要包括空气压缩机、气动二联件和2个比例减压阀,其中比例减压阀可实现对气压的连续控制,阀1控制收缩肌内部压力,阀2控制伸长肌内部压力。
柔性致动器实验系统实物图如图4b所示,致动器固定在三自由度试验平台上,该平台主要包括3个步进电机,3组丝杆以及滑台模组,可方便调整致动器的空间位置。平台底部为力传感器,用于采集致动器在充压时的输出力,力传感器由3D打印的夹具固定。

图4 柔性致动器的试验系统
4.2 力学特性
试验验证方法如图5a所示,使用3D打印的夹具将致动器固定,使其处于悬空状态。当测试致动器的输出力时,调整三自由度平台使致动器的自由端与力传感器的测力点临界接触。但是,在致动器不施加任何约束时充压,会产生屈曲现象,如图5b所示,会影响输出力精度。为了解决这一问题,在传感器的测力点安装了套筒,如图5c所示。

a)测力装置 b)屈曲现象 c)使用套筒解决屈曲问题
首先,伸长肌内充入0.05 MPa压力,此时致动器处于被压紧状态,力传感器会采集到输出力。接下来不断地充压收缩肌,会产生收缩力,直至与伸长肌的伸长力相抵消,试验结果与仿真结果如图6a所示。为了验证模型的可靠性,同样测试了伸长肌在0.1 MPa和0.15 MPa条件下的输出力变化过程,分别如图6b、图6c所示。
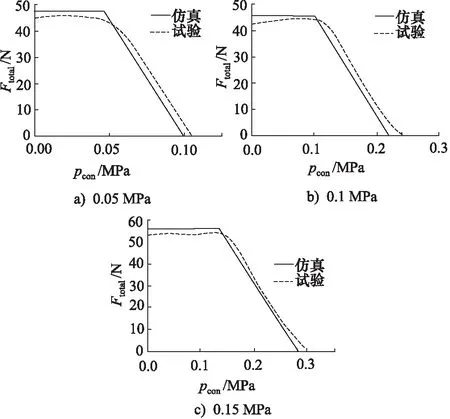
图6 柔性致动器的输出力的试验结果
在这3组试验中,试验结果与仿真结果的平均误差分别为25.45%,24.53%,24.29%。造成这一误差的原因主要是在输出力模型建立的过程中,忽略了摩擦力的存在,比如,织物纱线之间的摩擦力和织物层与硅胶基体之间的摩擦力。为了减小由于力损失产生的误差,在模型中引入修正系数C,因此,致动器的最终输出力Ftotal可表示如下:
Ftotal=F-CF
(16)
在本项研究中,修正系数C的值由试验结果与仿真结果的平均误差决定,即C≈25%。在这3组试验中,引入修正系数后的平均误差分别降为5.83%,5.44%,5.13%。
致动器的伸长肌和收缩肌在不同充压条件下会产生伸长力或收缩力,为拮抗型可变刚度柔性致动器的研究提供了理论依据。
4.3 刚度特性
单一的柔性流体驱动伸长肌或收缩肌通常只有1个充气孔,在某一定值输入压力下,保持一定的长度和固定的刚度。刚度是气体在腔室内压缩产生的结果,压力越高,刚度越大。本研究提出的柔性致动器采用伸长肌和收缩肌复合的方式,在保持某一长度不变时,改变伸长肌和收缩肌的压力值,进而改变致动器的整体刚度。
测试致动器的刚度方法如下:再次将致动器固定在三自由度平台上,致动器的自由端悬空。未充压时,致动器的长度为200 mm,将自由端悬挂1 kg的砝码,致动器的长度变为205 mm,即致动器的末端位移为5 mm,刚度可由重力/位移的关系得出。在致动器处于充压的状态下,继续测试其刚度。
为了验证致动器的可变刚度特性,首先测试了致动器在只对收缩肌充压时的末端位移和刚度,结果如图7a所示。在测试过程中,低压时致动器的末端位移比较小,使用游标卡尺多次测量并取平均值。随着收缩肌压力不断增大,没有悬挂砝码时,致动器的长度不断减小且幅度较大,悬挂砝码时的长度减小幅度较小,即位移逐渐减小,所以致动器的刚度不断变大且呈现一定的线性关系。同样,测试了只对伸长肌充压时的末端位移和刚度,如图7b所示。随着伸长肌压力不断增大,致动器的长度变化较大,是因为收缩肌对伸长肌的拉伸阻力相对较小。然而伸长肌对收缩肌的收缩影响较大,导致只充压收缩肌时,产生较小的长度变化。这里可以解释输出力的试验结果(见图6),伸长肌在某一压力下会产生推力,收缩肌充入至少2倍的伸长肌压力才会抵消伸长肌的推力。两种肌肉在相同的压力下,伸长肌的刚度大于收缩肌。
当致动器的伸长肌和收缩肌同时充压时,刚度会如何变化。首先,空载时收缩肌分别充入0.1,0.2,0.3 MPa,再将1 kg砝码悬挂在致动器的自由端,伸长肌同样依次充入0.1,0.2,0.3 MPa,记录期间产生的相对位移如图7c所示(虚线为空载时位移,实线为负载时位移),经计算得到的刚度如图7d所示。两肌肉同时充压与只充压伸长肌或收缩肌相比,悬挂砝码时产生的位移更小,即刚度明显增加。伸长肌在某一不变压力下,随着收缩肌压力不断增大,致动器的刚度不断增大,比如伸长肌充压0.3 MPa时,收缩肌在0.1,0.2,0.3 MPa下对应的刚度分别为16,22,26 N/mm。致动器的刚度是空气压缩产生的结果,压力越高,刚度越大。
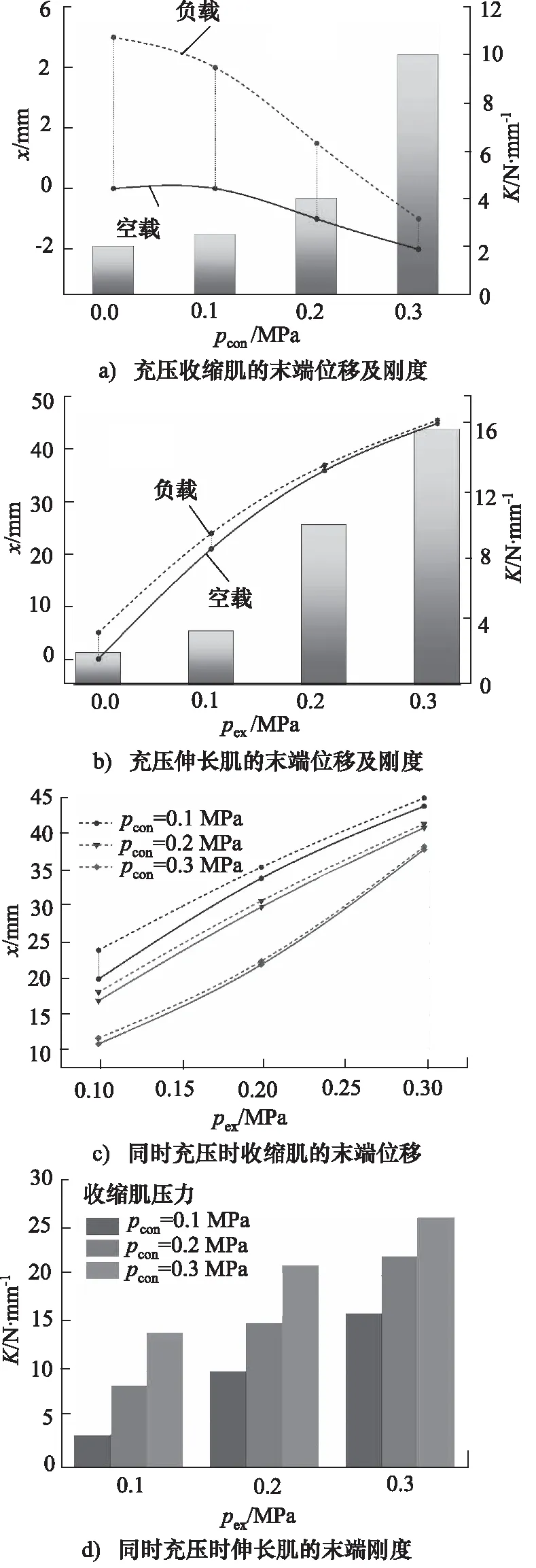
图7 柔性致动器的末端位移和刚度的试验结果
致动器在未充压时的初始长度为200 mm,伸长肌充压0.05 MPa,致动器会伸长,接下来不断地充压收缩肌,直至长度缩短为初始长度,该过程所需的收缩肌压力为0.12 MPa。经过悬挂砝码测得此时的刚度为3.3 N/mm。为了验证致动器的刚度可独立于长度进行调节,把致动器的伸长肌充压0.1 MPa,致动器依然会伸长,充压收缩肌直至长度恢复为初始长度,所需的收缩肌压力为0.23 MPa,此时的刚度为8.5 N/mm。当伸长肌充压0.15 MPa时,收缩肌需充压0.32 MPa恢复初始长度,计算的刚度为16 N/mm。由此可见,致动器可以在固定的长度下实现变刚度。
5 结论
本研究介绍了一种基于伸长肌和收缩肌拮抗机制的可变刚度流体驱动的柔性致动器的设计和制作,该致动器弥补了传统的柔性致动器刚度控制困难的缺点,可实现致动器轴向的协调伸长或收缩。并建立了该柔性致动器数学模型来预测其力学特性,经过试验验证,该模型的平均误差约为5%。伸长肌在输入压力下会产生推力,收缩肌充入至少2倍的伸长肌压力才会抵消伸长肌的推力,如伸长肌充压0.15 MPa时产生54 N的推力,收缩肌需充压0.3 MPa会使柔性致动器的输出力为0。
致动器的刚度是输入压力产生的结果,分别测试了致动器在只充压收缩肌或伸长肌下的刚度,和传统的单腔肌肉类似,具有某一固定的刚度,如伸长肌在0.3 MPa时的刚度为16 N/mm,收缩肌在0.3 MPa时的刚度为10 N/mm。当致动器的两腔同时充压时,刚度会变大,如伸长肌和收缩肌同时充压0.3 MPa时,刚度为26 N/mm,且可保持长度进行刚度的调节。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10 09:15:38
纺织科学研究(2021年7期)2021-12-02 02:56:27
纺织科技进展(2021年5期)2021-07-22 08:41:38
科技风(2018年31期)2018-07-09 12:46:38
中成药(2017年4期)2017-05-17 06:09:46
光学精密工程(2016年6期)2016-11-07 09:07:41
光学精密工程(2016年5期)2016-11-07 09:06:31
核科学与工程(2015年3期)2015-09-26 11:58:24
中国洗涤用品工业(2015年8期)2015-02-28 19:02:53
河北工业大学学报(2014年2期)2014-09-17 00:55:12
